






























































































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
This is the textbook only, not the engineering solutions.
Typology: Lecture notes
1 / 720

This page cannot be seen from the preview
Don't miss anything!
Boston Columbus Indianapolis New York San Francisco Upper Saddle River Amsterdam Cape Town Dubai London Madrid Milan Munich Paris Montréal Toronto Delhi Mexico City São Paulo Sydney Hong Kong Seoul Singapore Taipei Tokyo
Contents
Preface ix
Most of the changes made in this edition are the result of comments sent to me by students and faculty who have used the 3rd edition. These changes consist of improved clarity in explanations, the addition of some new examples that clarify concepts, and enhanced problem statements. In addition, some text material deemed outdated and not useful has been removed. The computer codes have also been updated. However, software companies update their codes much faster than the publishers can update their texts, so users should consult the web for updates in syntax, commands, etc. One consistent request from students has been not to reference data appearing previously in other examples or problems. This has been addressed by providing all of the relevant data in the problem statements. Three undergraduate engineering students (one in Engineering Mechanics, one in Biological Systems Engineering, and one in Mechanical Engineering) who had the prerequisite courses, but had not yet had courses in vibra- tions, read the manuscript for clarity. Their suggestions prompted us to make the fol- lowing changes in order to improve readability from the student’s perspective:
Improved clarity in explanations added in 47 different passages in the text. In addition, two new windows have been added. Twelve new examples that clarify concepts and enhanced problem statements have been added, and ten examples have been modified to improve clarity. Text material deemed outdated and not useful has been removed. Two sections have been dropped and two sections have been completely rewritten. All computer codes have been updated to agree with the latest syntax changes made in MATLAB, Mathematica, and Mathcad. Fifty-four new problems have been added and 94 problems have been modi- fied for clarity and numerical changes. Eight new figures have been added and three previous figures have been modified. Four new equations have been added.
Chapter 1 : Changes include new examples, equations, and problems. New textual explanations have been added and/or modified to improve clarity based on student sug- gestions. Modifications have been made to problems to make the problem statement clear by not referring to data from previous problems or examples. All of the codes have been updated to current syntax, and older, obsolete commands have been replaced. Chapter 2 : New examples and figures have been added, while previous exam- ples and figures have been modified for clarity. New textual explanations have also been added and/or modified. New problems have been added and older problems modified to make the problem statement clear by not referring to data from previ- ous problems or examples. All of the codes have been updated to current syntax, and older, obsolete commands have been replaced.
x Preface
Chapter 3 : New examples and equations have been added, as well as new problems. In particular, the explanation of impulse has been expanded. In addition, previous problems have been rewritten for clarity and precision. All examples and problems that referred to prior information in the text have been modified to pres- ent a more self-contained statement. All of the codes have been updated to current syntax, and older, obsolete commands have been replaced. Chapter 4 : Along with the addition of an entirely new example, many of the examples have been changed and modified for clarity and to include improved information. A new window has been added to clarify matrix information. A fig- ure has been removed and a new figure added. New problems have been added and older problems have been modified with the goal of making all problems and examples more self-contained. All of the codes have been updated to current syntax, and older, obsolete commands have been replaced. Several new plots intermixed in the codes have been redone to reflect issues with Mathematica and MATLAB’s automated time step which proves to be inaccurate when using singu- larity functions. Several explanations have been modified according to students’ suggestions. Chapter 5 : Section 5.1 has been changed, the figure replaced, and the example changed for clarity. The problems are largely the same but many have been changed or modified with different details and to make the problems more self-contained. Section 5.8 (Active Vibration Suppression) and Section 5.9 (Practical Isolation Design) have been removed, along with the associated problems, to make room for added material in the earlier chapters without lengthening the book. According to user surveys, these sections are not usually covered. Chapter 6 : Section 6.8 has been rewritten for clarity and a window has been added to summarize modal analysis of the forced response. New problems have been added and many older problems restated for clarity. Further details have been added to several examples. A number of small additions have been made to the to the text for clarity. Chapters 7 and 8 : These chapters were not changed, except to make minor corrections and additions as suggested by users.
Units
This book uses SI units. The 1st edition used a mixture of US Customary and SI, but at the insistence of the editor all units were changed to SI. I have stayed with SI in this edition because of the increasing international arena that our engineering graduates compete in. The engineering community is now completely global. For instance, GE Corporate Research has more engineers in its research center in India than it does in the US. Engineering in the US is in danger of becoming the ‘gar- ment’ workers of the next decade if we do not recognize the global work place. Our engineers need to work in SI to be competitive in this increasingly international work place.
xii Preface
make sure they ran. My former PhD students Ya Wang, Mana Afshari, and Amin Karami checked many of the new problems and examples. Dr. Scott Larwood and the students in his vibrations class at the University of the Pacific sent many sug- gestions and corrections that helped give the book the perspective of a nonresearch insitution. I have implemented many of their suggestions, and I believe the book’s explanations are much clearer due to their input. Other professors using the book, Cetin Cetinkaya of Clarkson University, Mike Anderson of the University of Idaho, Joe Slater of Wright State University, Ronnie Pendersen of Aalborg University Esbjerg, Sondi Adhikari of the Universty of Wales, David Che of Geneva College, Tim Crippen of the University of Texas at Tyler, and Nejat Olgac of the University of Conneticut, have provided discussions via email that have led to improvements in the text, all of which are greatly appreciated. I would like to thank the review- ers: Cetin Cetinkaya, Clarkson University; Dr. Nesrin Sarigul-Klijn, University of California–Davis; and David Che, Geneva College. Many of my former PhD students who are now academics cotaught this course with me and also offered many suggestions. Alper Erturk (Georgia Tech), Henry Sodano (University of Florida), Pablo Tarazaga (Virginia Tech), Onur Bilgen (Old Dominian University), Mike Seigler (University of Kentucky), and Armaghan Salehian (University of Waterloo) all contributed to clarity in this text for which I am grateful. I have been lucky to have wonderful PhD students to work with. I learned much from them. I would also like to thank Prof. Joseph Slater of Wright State for reviewing some of the new materials, for writing and managing the associated toolbox, and constantly sending suggestions. Several colleagues from government labs and com- panies have also written with suggestions which have been very helpful from that perspective of practice. I have also had the good fortune of being sponsored by numerous companies and federal agencies over the last 32 years to study, design, test, and analyze a large variety of vibrating structures and machines. Without these projects, I would not have been able to write this book nor revise it with the appreciation for the practice of vibration, which I hope permeates the text. Last, I wish to thank my family for moral support, a sense of purpose, and for putting up with my absence while writing.
DANIEL J. INMAN Ann Arbor, Michigan
1
Vibration is the subdiscipline of dynamics that deals with repetitive motion. most of the examples in this text are mechanical or structural elements. However, vibration is prevalent in biological systems and is in fact at the source of communication (the ear vibrates to hear and the tongue and vocal cords vibrate to speak). in the case of music, vibrations, say of a stringed instrument such as a guitar, are desired. On the other hand, in most mechanical systems and structures, vibration is unwanted and even destructive. For example, vibration in an aircraft frame causes fatigue and can eventually lead to failure. an example of fatigue crack is illustrated in the circle in the photo on the bottom left. Everyday experiences are full of vibration and usually ways of mitigating vibration. automobiles, trains, and even some bicycles have devices to reduce the vibration induced by motion and transmitted to the driver. The task of this text is to teach the reader how to analyze vibration using principles of dynamics. This requires the use of mathematics. in fact, the sine function provides the fundamental means of analyzing vibration phenomena. The basic concepts of understanding vibration, analyzing vibration, and predicting the behavior of vibrating systems form the topics of this text. The concepts and formulations presented in the following chapters are intended to provide the skills needed for designing vibrating systems with desired properties that enhance vibration when it is wanted and reduce vibration when it is not. This first chapter examines vibration in its simplest form in which no external force is present (free vibration). This chapter introduces both the important concept of natural frequency and how to model vibration mathematically. The internet is a great source for examples of vibration, and the reader is encouraged to search for movies of vibrating systems and other examples that can be found there.
Sec. 1.1 Introduction to Free Vibration 3
This pendulum example tells the story of this text. We propose a series of steps to build on the modeling skills developed in your first courses in statics, dy- namics, and strength of materials combined with system dynamics to find equations of motion of successively more complicated systems. Then we will use the tech- niques of differential equations and numerical integration to solve these equations of motion to predict how various mechanical systems and structures vibrate. The following example illustrates the importance of recalling the methods learned in the first course in dynamics.
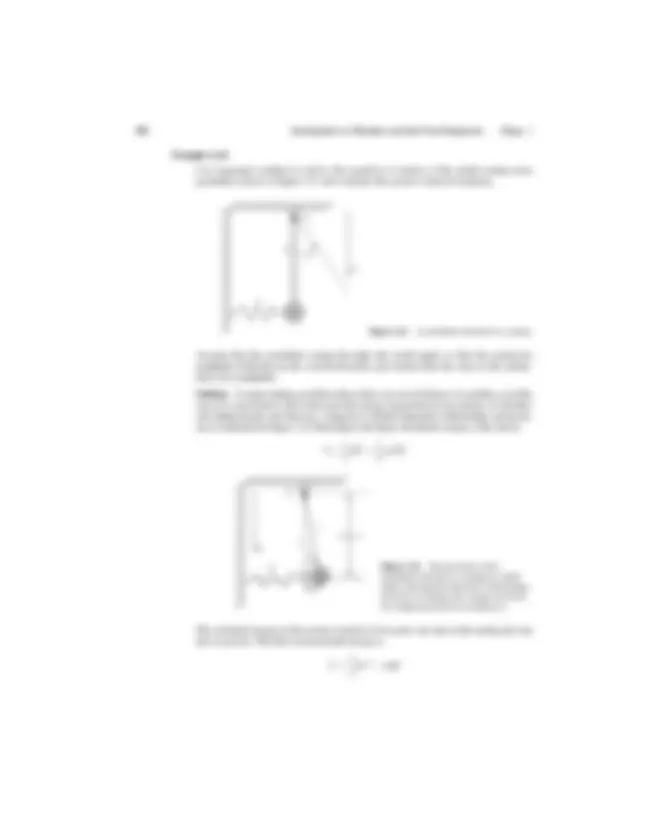
Example 1.1. Derive the equation of motion of the pendulum in Figure 1.1.
m
l
O
g
mg
l
O
Fy Fx
m
(a) (b)
Figure 1.1 (a) A schematic of a pendulum. (b) The free-body diagram of (a).
Solution Consider the schematic of a pendulum in Figure 1.1(a). In this case, the mass of the rod will be ignored as well as any friction in the hinge. Typically, one starts with a photograph or sketch of the part or structure of interest and is immediately faced with having to make assumptions. This is the “art” or experience side of vibration analysis and modeling. The general philosophy is to start with the simplest model possible (hence, here we ignore friction and the mass of the rod and assume the motion remains in a plane) and try to answer the relevant engineering questions. If the simple model doesn’t agree with the experiment, then make it more complex by relaxing the assump- tions until the model successfully predicts physical observation. With the assumptions in mind, the next step is to create a free-body diagram of the system, as indicated in Figure 1.1(b), in order to identify all of the relevant forces. With all the modeled forces identified, Newton’s second law and Euler’s second law are used to derive the equa- tions of motion. In this example Euler’s second law takes the form of summing moments about point O. This yields Σ M O = J
4 Introduction to Vibration and the Free Response Chap. 1
where M O denotes moments about the point O, J = ml^2 is the mass moment of inertia of the mass m about the point O, l is the length of the massless rod, and is the angu- lar acceleration vector. Since the problem is really in one dimension, the vector sum of moments equation becomes the single scalar equation J α( t ) = - mgl sin θ( t ) or ml^2 θ
$ ( t ) + mgl sin θ( t ) = 0 Here the moment arm for the force mg is the horizontal distance l sin θ, and the two overdots indicate two differentiations with respect to the time, t. This is a second-order ordinary differential equation, which governs the time response of the pendulum. This is exactly the procedure used in the first course in dynamics to obtain equations of motion. The equation of motion is nonlinear because of the appearance of the sin(θ) and hence difficult to solve. The nonlinear term can be made linear by approximating the sine for small values of θ( t ) as sin θ ≈ θ. Then the equation of motion becomes
θ
$ ( t ) +
g l θ( t ) = 0
This is a linear, second-order ordinary differential equation with constant coefficients and is commonly solved in the first course of differential equations (usually the third course in the calculus sequence). As we will see later in this chapter, this linear equa- tion of motion and its solution predict the period of oscillation for a simple pendulum quite accurately. The last section of this chapter revisits the nonlinear version of the pendulum equation. n
Since Newton’s second law for a constant mass system is stated in terms of force, which is equated to the mass multiplied by acceleration, an equation of motion with two time derivatives will always result. Such equations require two constants of integration to solve. Euler’s second law for constant mass systems also yields two time derivatives. Hence the initial position for θ(0) and velocity of θ
(0) must be specified in order to solve for θ( t ) in Example 1.1.1. The term mgl sin θ is called the restoring force. In Example 1.1.1, the restoring force is gravity, which provides a potential-energy storing mechanism. However, in most structures and machine parts the restoring force is elastic. This establishes the need for background in strength of materials when studying vibrations of structures and machines. As mentioned in the example, when modeling a structure or machine it is best to start with the simplest possible model. In this chapter, we model only sys- tems that can be described by a single degree of freedom, that is, systems for which Newtonian mechanics result in a single scalar equation with one displacement coor- dinate. The degree of freedom of a system is the minimum number of displacement coordinates needed to represent the position of the system’s mass at any instant of time. For instance, if the mass of the pendulum in Example 1.1.1 were a rigid body, free to rotate about the end of the pendulum as the pendulum swings, the angle of rotation of the mass would define an additional degree of freedom. The problem would then require two coordinates to determine the position of the mass in space, hence two degrees of freedom. On the other hand, if the rod in Figure 1.1 is flexible,
6 Introduction to Vibration and the Free Response Chap. 1
Ignoring the mass of the spring itself, the forces acting on the mass consist of the force of gravity pulling down ( mg ) and the elastic-restoring force of the spring pulling back up ( fk ). Note that in this case the force vectors are collinear, reducing the static equilibrium equation to one dimension easily treated as a scalar. The nature of the spring force can be deduced by performing a simple static experiment. With no mass attached, the spring stretches to the position labeled x 0 = 0 in Figure 1.3. As successively more mass is attached to the spring, the force of gravity causes the spring to stretch further. If the value of the mass is recorded, along with the value of the displacement of the end of the spring each time more mass is added, the plot of the force (mass, denoted by m , times the acceleration due to gravity, denoted by g ) versus this displacement, denoted by x , yields a curve similar to that illustrated in Figure 1.4. Note that in the region of values for x between 0 and about 20 mm (millimeters), the curve is a straight line. This indicates that for deflections less than 20 mm and forces less than 1000 N (newtons), the force that is applied by the spring to the mass is pro- portional to the stretch of the spring. The constant of proportionality is the slope of the straight line between 0 and 20 mm. For the particular spring of Figure 1.4, the constant is 50 N>mm, or 5 * 104 N>m. Thus, the equation that describes the force applied by the spring, denoted by fk , to the mass is the linear relationship fk = kx (1.1) The value of the slope, denoted by k , is called the stiffness of the spring and is a property that characterizes the spring for all situations for which the displacement is less than 20 mm. From strength-of-materials considerations, a linear spring of stiffness k stores potential energy of the amount 12 kx^2.
x 0
g
x (^1) x (^2) x 3
Figure 1.3 A schematic of a massless spring with no mass attached showing its static equilibrium position, followed by increments of increasing added mass illustrating the corresponding deflections.
x
fk
0 20 mm
103 N
Figure 1.4 The static deflection curve for the spring of Figure 1.3.
Sec. 1.1 Introduction to Free Vibration 7
Note that the relationship between fk and x of equation (1.1) is linear (i.e., the curve is linear and fk depends linearly on x ). If the displacement of the spring is larger than 20 mm, the relationship between fk and x becomes nonlinear , as indi- cated in Figure 1.4. Nonlinear systems are much more difficult to analyze and form the topic of Section 1.10. In this and all other chapters, it is assumed that displace- ments (and forces) are limited to be in the linear range unless specified otherwise. Next, consider a free-body diagram of the mass in Figure 1.5, with the mass- less spring elongated from its rest (equilibrium or unstretched) position. As in the earlier figures, the mass of the object is taken to be m and the stiffness of the spring is taken to be k. Assuming that the mass moves on a frictionless surface along the x direction, the only force acting on the mass in the x direction is the spring force. As long as the motion of the spring does not exceed its linear range, the sum of the forces in the x direction must equal the product of mass and acceleration. Summing the forces on the free-body diagram in Figure 1.5 along the x direc- tion yields mx
( t ) = - kx ( t ) or mx
( t ) + kx ( t ) = 0 (1.2) where x
( t ) denotes the second time derivative of the displacement (i.e., the accel- eration). Note that the direction of the spring force is opposite that of the deflection ( + is marked to the right in the figure). As in Example 1.1.1, the displacement vec- tor and acceleration vector are reduced to scalars, since the net force in the y direc- tion is zero ( N = mg ) and the force in the x direction is collinear with the inertial force. Both the displacement and acceleration are functions of the elapsed time t , as denoted in equation (1.2). Window 1.1 illustrates three types of mechanical sys- tems, which for small oscillations can be described by equation (1.2): a spring–mass system, a rotating shaft, and a swinging pendulum (Example 1.1.1). Other examples are given in Section 1.4 and throughout the book. One of the goals of vibration analysis is to be able to predict the response, or motion, of a vibrating system. Thus it is desirable to calculate the solution to equation (1.2). Fortunately, the differential equation of (1.2) is well known and is covered extensively in introductory calculus and physics texts, as well as in texts on differential equations. In fact, there are a variety of ways to calculate this solution. These are all discussed in some detail in the next section. For now, it is sufficient to present a solution based on physical observation. From experience
y x
kx mg
N
m
x 0
k
0 Friction-free surface
Rest position (a) (b)
Figure 1.5 (a) A single spring–mass system given an initial displacement of x 0 from its rest, or equilibrium, position and zero initial velocity. (b) The system’s free- body diagram.