



Numerical Methods for Partial
Differential Equations
Docsity.com




















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The main points are: Finite-Difference Solver, Cash-Karp Runge-Kutta Time Integrator, Time Stepping, Central Difference, Spatial Operator, Compute Maximum Error, Accuracy Order of Solution, Vector Version, Vector Argument
Typology: Slides
1 / 33

This page cannot be seen from the preview
Don't miss anything!
Q1) Build a finite-difference solver for Q1a) use your Cash-Karp Runge-Kutta time integrator from HW2 fortime stepping
Q1b) use the 4th^ order central difference in space (periodic domain) Q1c) perform a stability analysis for the time-stepping (based on visual inspection of the CKR-K stability region containing the imaginary axis)
Q1d) bound the spectral radius of the spatial operator Q1e) choose a dt well in the stability region Q1f) perform four runs with initial condition (use M=20,40,80,160) and compute maximum error at t=
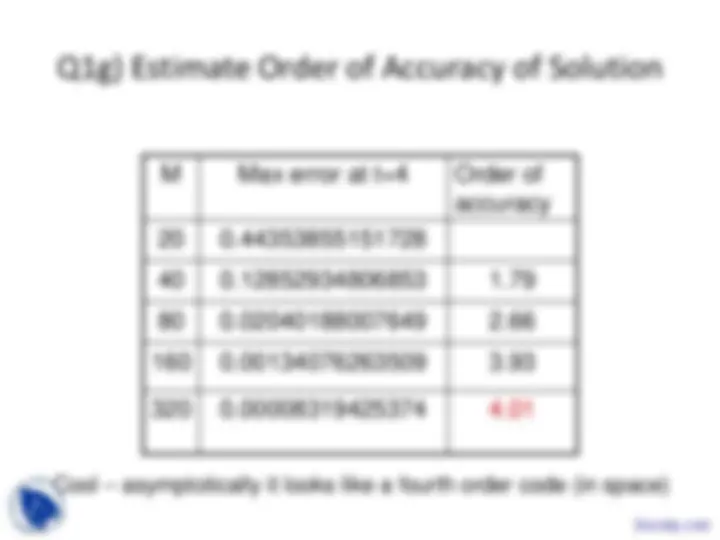
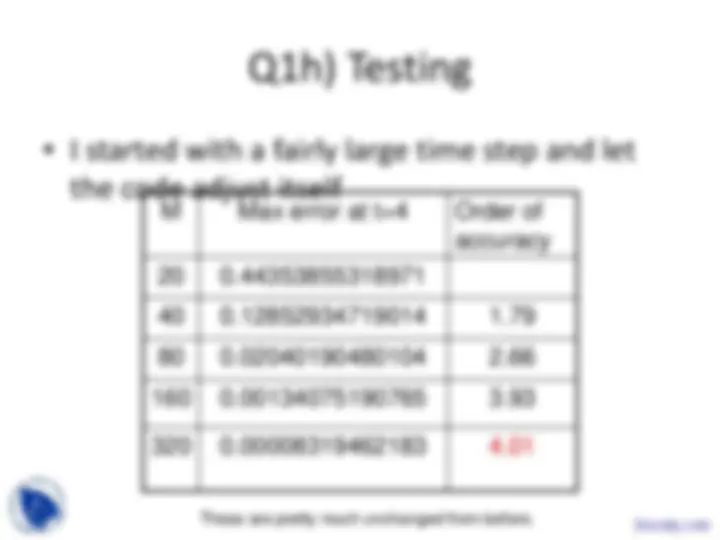
Q1g) estimate the accuracy order of the solution. Q1h) extra credit: perform adaptive time-stepping to keep the local truncation error fromtime stepping bounded by a tolerance.
( ) (^ )^ [ ] 4cos^2
http://www.library.cornell.edu/nr/bookcpdf/c16-2.pdf
b
Q1) Build a finite-difference solver for Q1a) use your Cash-Karp Runge-Kutta time integrator from HW2 for time stepping Q1b) use the 4th^ order central difference in space (periodic domain) Q1c) perform a stability analysis for the time-stepping (based on visual inspection of the CKR-K stability region containing the imaginary axis)
Q1d) bound the spectral radius of the spatial operator Q1e) choose a dt well in the stability region Q1f) perform four runs with initial condition (use M=20,40,80,160) and compute maximum error at t=
Q1g) estimate the accuracy order of the solution. Q1h) extra credit: perform adaptive time-stepping to keep the local truncation error fromtime stepping bounded by a tolerance.
( ) (^ )^ [ ] 4cos^2
1 2 21 1 3 31 1 32 2 4 41 1 42 2 43 3 5 51 1 52 2 53 3 54 4 6 61 1 62 2 63 3 64 4 65 5 1 1 1 2 2 3 3 4 4 5 5 6 6
n n n n n n
n n
k dtf u k dtf u b k k dtf u b k b k k dtf u b k b k b k k dtf u b k b k b k b k k dtf u b k b k b k b k b k u + u c k c k c k c k c k c k
1 2 21 1 3 31 1 32 2 4 41 1 42 2 43 3 5 51 1 52 2 53 3 54 4 6 61 1 62 2 63 3 64 4 65 5 1 1 1 2 2 3 3 4 4 5 5 6 6
n n n n n n
n n
k dtu k dt u b k k dt u b k b k k dt u b k b k b k k dt u b k b k b k b k k dt u b k b k b k b k b k u u c k c k c k c k c k c k
e^ ν
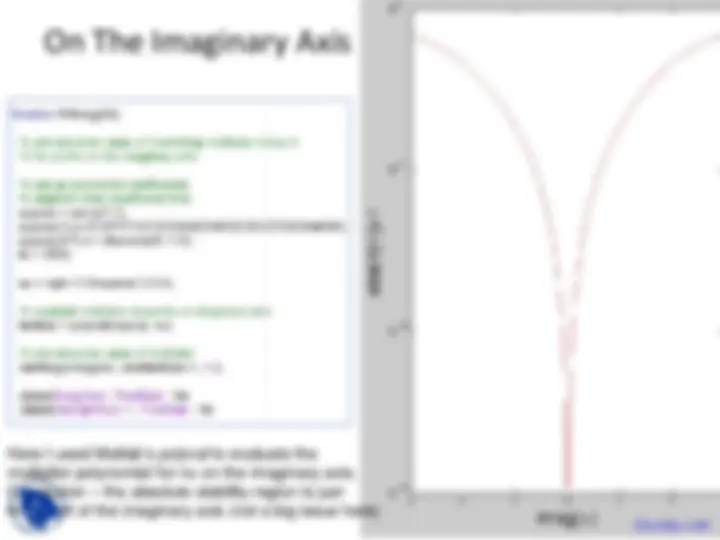
Here I used Matlab’smultiplier polynomial for nu on the imaginary axis. polyval to evaluate the Conclusion – the absolute stability region is justto the left of the imaginary axis (not a big issue here)
Q1) Build a finite-difference solver for Q1a) use your Cash-Karp Runge-Kutta time integrator from HW2 for time stepping Q1b) use the 4th^ order central difference in space (periodic domain) Q1c) perform a stability analysis for the time-stepping (based on visual inspection of the CKR-K stability region containing the imaginary axis)
Q1d) bound the spectral radius of the spatial operator Q1e) choose a dt well in the stability region Q1f) perform four runs with initial condition (use M=20,40,80,160) and compute maximum error at t=
Q1g) estimate the accuracy order of the solution. Q1h) extra credit: perform adaptive time-stepping to keep the local truncation error fromtime stepping bounded by a tolerance.
( ) (^ )^ [ ] 4cos^2