



Numerical Methods for Partial
Differential Equations
Docsity.com
































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An overview of numerical methods for solving partial differential equations (pdes), including finite difference methods, taylor series expansions, and the runge-kutta method. It also discusses stability and accuracy analysis, as well as the use of delta operators for approximating derivatives.
Typology: Slides
1 / 44

This page cannot be seen from the preview
Don't miss anything!
1 (^1 ) 1
m s
n n m n m m
u u dt α f u
=
= + (^) ∑
( ) (^1 ) 1
m s
n n n n m n m m
f u μu u u dt μ α u
=
= ⇒ = + (^) ∑
1
1
m s s s s m m m
z z dt μ α z
= − −
=
= + (^) ∑
1
1
m s s s s m m m
z z dt μ α z
= − −
=
= + (^) ∑
1 1
1
1
m s^ s^ s s s s m m (^) m s m s^ m m m
μ α μ
α
= − − − = = −
=
= + (^) ∑ ⇒ =
∑
3 2
ν
3 2
ν
i
θ
ν
truncation error in terms of u and its derivatives
at tn:
theorem, which requires consistency and stability
convergence and corollary which gives us
global error estimates:
( (^1) ) ( ) ( ( 1 )) 1
m s
n n m n m n m
u t u t dt α f u t T
=
= + (^) ∑ +
( ) [^ ]
1 1 * *
s s n (^) s n n n n
( ) (^) n, , ,...
s
schemes.
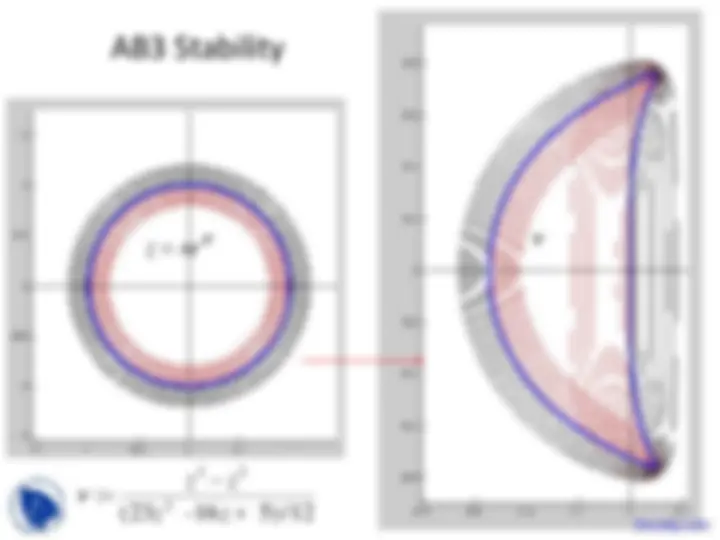
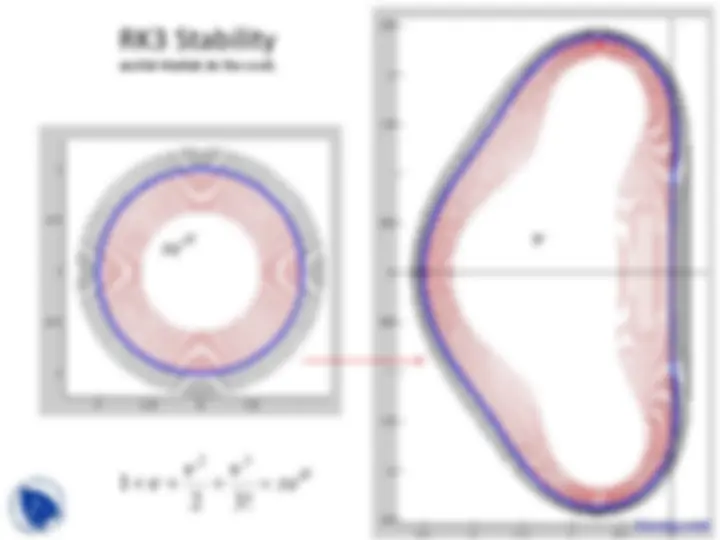
found that the recurrence for a linear f was:
1
m s^ m
n n m
ν
=
=
∑
0
m s^ m
=
∑ ≤
m s m i
m
ν θ
=
=
∑ =
little more complicated, but still boils down to
dt expansions of the one-step operator.
we have convergence.
implicit schemes.
formulation of RK methods.
t n
u u c t x
∂ ∂
xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
t n
xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
t n
xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
t n xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
t n xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
t n xm (^) − 2 xm (^) − 1 x m xm (^) + 1 xm (^) + 2
x xm (^) − 3 xm (^) + 3
x
2 2 3 3
(^1 2 )
m m m m m
2 2 3 (^1) * 2 3
m m m m m
x
2 2 3 (^1) * 2 3
m m m m m
x
m 1 m m
2 2 3
2 3
m m m m
2 2 3 3 4 4 5 5
(^1 2 3 4 )
2 2 3 3 4 4 5 5 ** (^1 2 3 4 )
m m m m m m m
m m m m m m m
−
3 3 5 (^1 1 )
m m m m
x