Download Lecture 2: Probability & Functions of Random Variables in Data Analysis by G. Cowan and more Slides Computational and Statistical Data Analysis in PDF only on Docsity!
Statistical Data Analysis: Lecture 2
1 Probability, Bayes’ theorem, random variables, pdfs 2 Functions of r.v.s, expectation values, error propagation 3 Catalogue of pdfs 4 The Monte Carlo method 5 Statistical tests: general concepts 6 Test statistics, multivariate methods 7 Goodness-of-fit tests 8 Parameter estimation, maximum likelihood 9 More maximum likelihood 10 Method of least squares 11 Interval estimation, setting limits 12 Nuisance parameters, systematic uncertainties 13 Examples of Bayesian approach 14 tba 15 tba
Functions of a random variable
A function of a random variable is itself a random variable. Suppose x follows a pdf f ( x ), consider a function a ( x ). What is the pdf g ( a )? dS = region of x space for which a is in [ a , a + da ]. For one-variable case with unique inverse this is simply →
Functions of more than one r.v.
Consider r.v.s and a function dS = region of x -space between (hyper)surfaces defined by
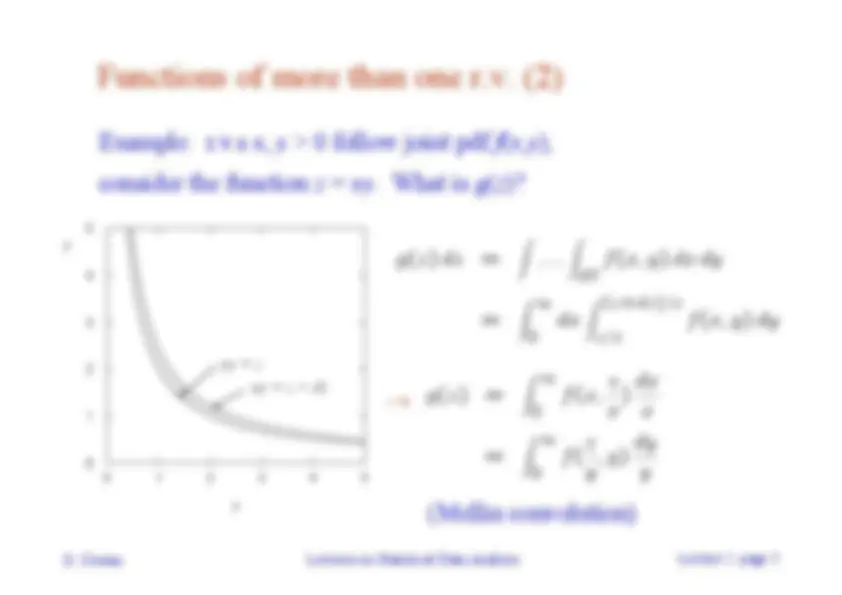
Functions of more than one r.v. (2)
Example: r.v.s x , y > 0 follow joint pdf f ( x , y ), consider the function z = xy. What is g ( z )? → (Mellin convolution)
Expectation values
Consider continuous r.v. x with pdf f ( x ). Define expectation (mean) value as Notation (often): ~ “centre of gravity” of pdf. For a function y ( x ) with pdf g ( y ), (equivalent) Variance: Notation: Standard deviation:
σ ~ width of pdf, same units as x.
Covariance and correlation
Define covariance cov[ x , y ] (also use matrix notation V xy ) as Correlation coefficient (dimensionless) defined as If x , y , independent, i.e., , then → x and y , ‘uncorrelated’ N.B. converse not always true.
Error propagation
which quantify the measurement errors in the x i
Suppose we measure a set of values and we have the covariances Now consider a function What is the variance of The hard way: use joint pdf to find the pdf then from g ( y ) find V [ y ] = E [ y 2 ] ( E [ y ]) 2 . Often not practical, may not even be fully known.
Error propagation (2)
Suppose we had in practice only estimates given by the measured Expand to 1st order in a Taylor series about since To find V [ y ] we need E [ y 2 ] and E [ y ].
Error propagation (4)
If the x i are uncorrelated, i.e., then this becomes Similar for a set of m functions or in matrix notation (^) where
Error propagation (5)
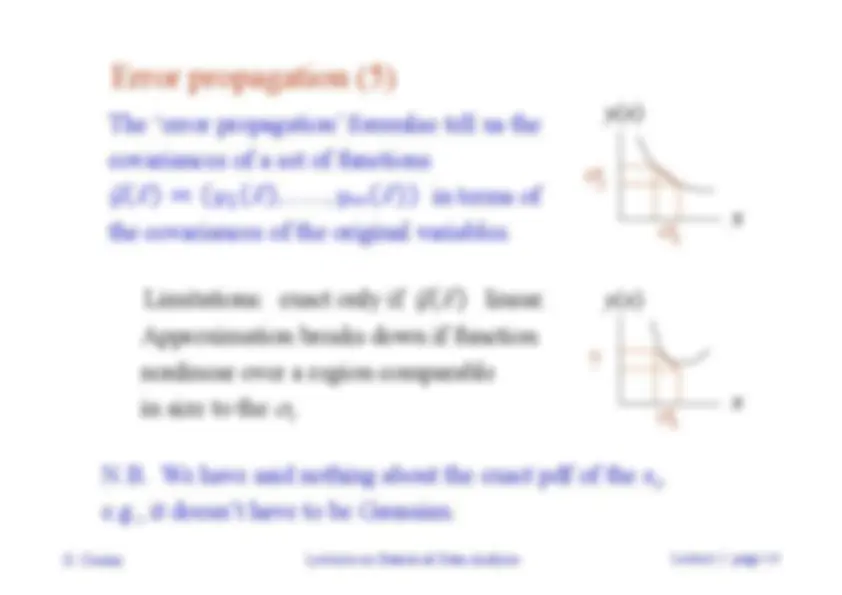
The ‘error propagation’ formulae tell us the covariances of a set of functions in terms of the covariances of the original variables. Limitations: exact only if linear. Approximation breaks down if function nonlinear over a region comparable
in size to the σ
i
N.B. We have said nothing about the exact pdf of the x i
e.g., it doesn’t have to be Gaussian. x y ( x )
x
y x
x
y ( x )
Error propagation − special cases (2)
Consider (^) with
Now suppose ρ = 1. Then
i.e. for 100% correlation, error in difference → 0.
Wrapping up lecture 2
We know how to determine the pdf of a function of an r.v. single variable, unique inverse: also saw non-unique inverse and multivariate case. We know how to describe a pdf using expectation values (mean, variance), covariance, correlation, ... Given a function of a random variable, we know how to find the variance of the function using error propagation. also for covariance matrix in multivariate case; based on linear approximation.