Download Geometric Transformations-Digital Image Processing-Lecture Slides and more Slides Digital Image Processing in PDF only on Docsity!
2
Geometric transformations ^ Also called spatial transformations, 2D transformations ^ Include: translation, rotation, scaling, nonlinear warping,or perspective angle adjustment. ^ It is actually a rearrangement of pixels on the imageplane^ ^ The^ coordinates
of^ input^ image
are^ transformed
into
coordinates^
of^ output^ image
using^ a^
transformation
function. The output intensity at a specific location may not dependon the input intensity at same location, but on intensity atsome^ other
location^ specified
by^ the^ transformation
function. The gray levels of the input image are mapped on theoutput image using gray level interpolations for accurateapproximation of gray levels
3
Geometric transformations ^ The transformations may generally be expressed aswhere r and s are transformation functions ^ Translation:
The translation of an input image
f(x,y)
with respect to its origin to produce an output image g(x’,y’)^ can be expressed
^ ( ,^ ) x r x y^ and ^ ( ,^ ) y^ s x y , where^ and x y^ are translation offsets x y x^ x^ t^
and y^ y^ t t^
t ^ ^
5
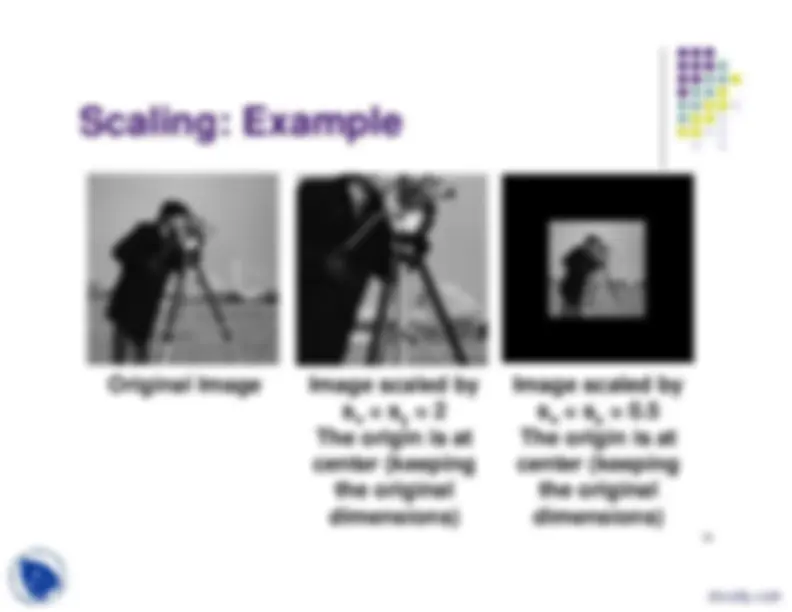
Geometric transformations:Scaling ^ With^ input
coordinates
as^ x^ and
y,^ and^ scaling
factors s^ and sx^
the scaling transformation is giveny^ by: Matrix form
^ * x x^ s^ and ^ x * y^ y^ sy^0
sx x y
x
y^
s^ y
^ ^
^ ^
^
^
^ ^
^
^ ^
^ ^
^
^
^ ^
^
^ ^
^
^
1/^0
0 ,^0
1/^0
x^
x y^
y
s^
s
s^
s
^
^ ^
^
^ ^
^
^
^ ^
^
^ ^
^
^ ^
-
S^
S
6
Geometric transformations:Rotation ^ As shown in the figure we havefind (x’,y’) which are the newcoordinates
of^ a^ point
in^ an
object which is rotated by anangle with respect to the origin. Consider the geometry shownbelow^ c o s (
) s in ( ) c o s c o s^
s in^ s in s in^ c o s^
c o s^ s in x y x y
^ ^ ^
^
^
^
^
^
^
^
R R R^
R
R^
R
8
Geometric transformations:Origin translation ^ It is important that during the transformation, theorigin should be taken correctly. ^ In most cases the origin or the reference point forsuch transformation is the center of the image ^ Therefore it is necessary for such transformation toshift the origin by translation as
9
Translation: Example^ Original Image
Translated imagetx= ty = 40
11
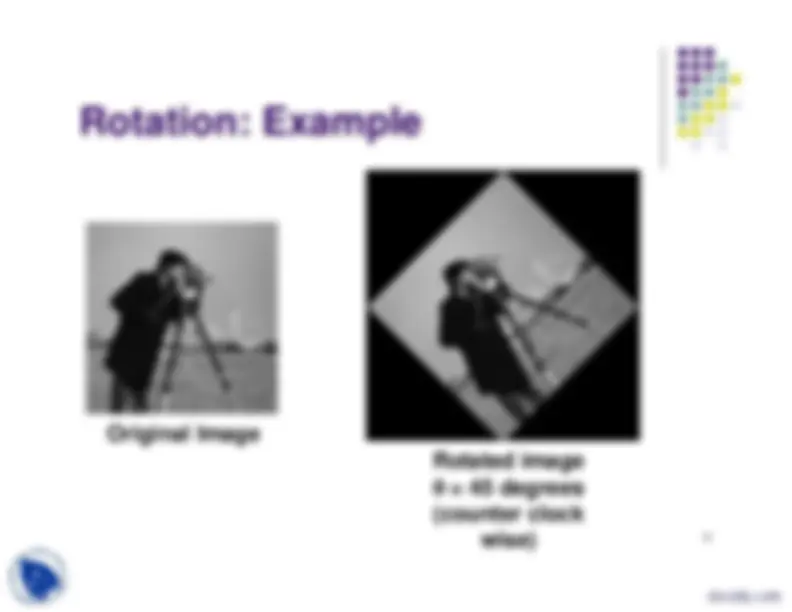
Rotation: Example^ Original Image
Rotated image = 45 degrees(counter clockwise)
12
Combination of transforms ^ The basic transformations (scaling, translation,rotation) can be combined as:^ where^ ^ In matrix form ^ It can be simplified as
P = T×S×R×P and are the output and input coordinates P P 1 0
0 0 cos
sin^0 0 1
0 sin^ cos
t^ s^ x^ x y^ y x^
x
y^
t^ s^
y ^ ^
^ ^
^
^
^ ^
^
^
^
^ ^
^
^
^
^ ^
^
^
^
^ ^
^
^ ^
^
^
^
23
a^ a^
a
x^
x
y^ a^
a^ a^
y
^ ^
^ ^
^
^
^ ^
^
^ ^
^ ^
^
^
^ ^
^
^ ^
^
^
Affine transformation
14
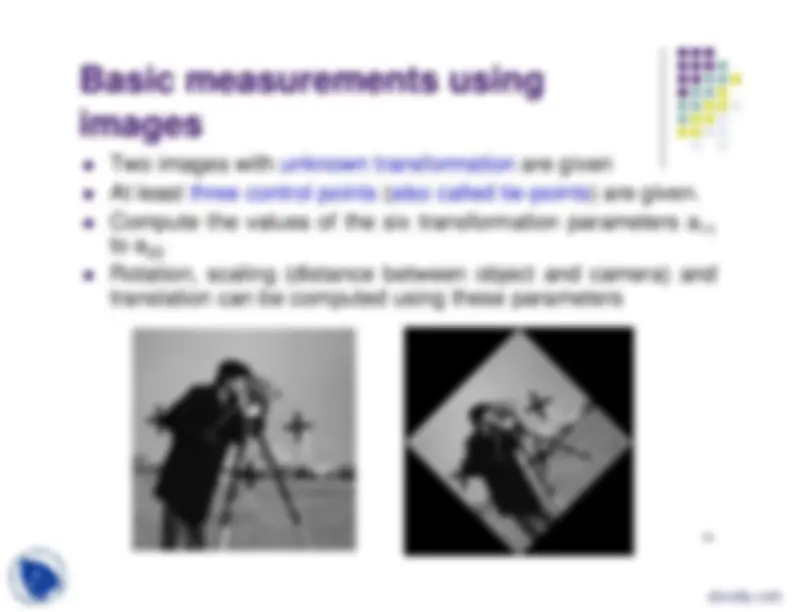
Basic measurements usingimages^ ^ Two images with unknown transformation are given^ ^ At least three control points (also called tie-points) are given.^ ^ Compute the values of the six transformation parameters a
11
to a^23 Rotation, scaling (distance between object and camera) andtranslation can be computed using these parameters
15
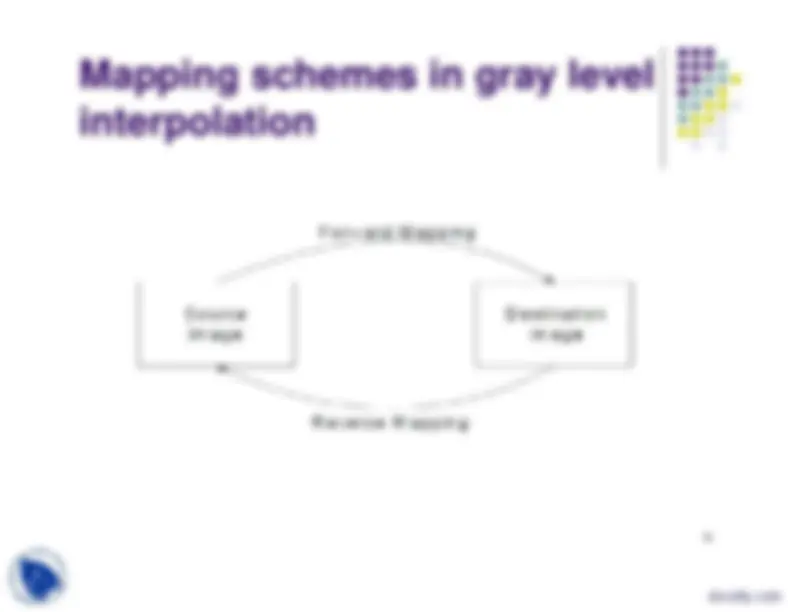
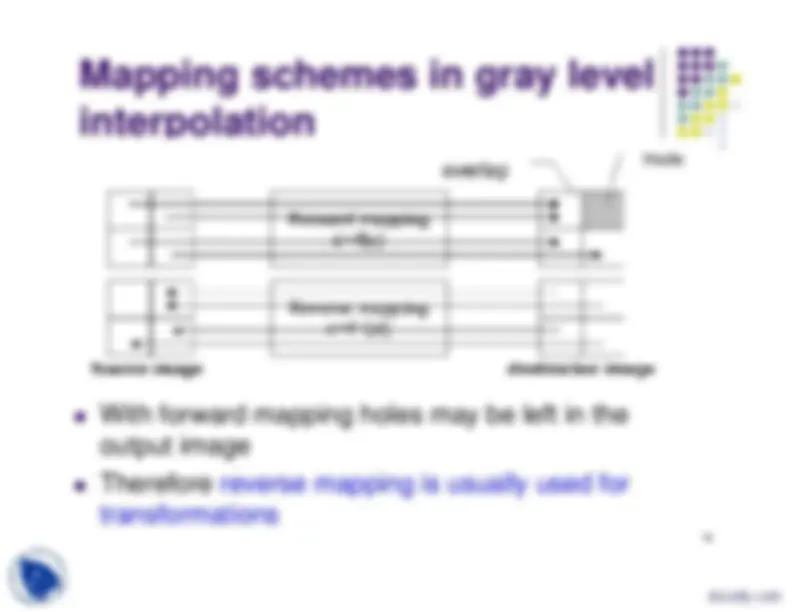
Mapping schemes in gray levelinterpolation
17
Resampling and interpolation ^ Nearest neighbor interpolation ^ Bilinear^
interpolation:
Two-dimensional
linear
interpolation of pixel values based on the four pixelsin a 2 x 2 pixel neighborhood Bicubic^
interpolation:
Two-dimensional
cubic
interpolation of pixel values based on the 16 pixelsin a 4 x 4 pixel neighborhood.
18
Reading assignment ^ Section 5.4 (except 5.4.4) ^ Section 5.7 ^ Section 5.8 ^ Section 5.