Download hydro-static lab report and more Lab Reports Fluid Mechanics in PDF only on Docsity!
LAB REPORT FLUID MECHANICS FOR
HYDROSTATIC PRESSURE.
ABSTRACT
The objective of this lab is to determine the hydrostatic force acting on a rectangular surface immersed in water when the surface is partially submerged or fully submerged. Also to determine the experimental center of pressure, and the theoretical center of pressure for each of the trials performed.
ID Mothibi
MFM21A
Student number(s): 2 1 9 0 1 3 4 2 1
Surname and initials: ID MOTHIBI
Programme: DipEngTech (Mechanical Engineering)
Module name: FLUID MECHANICS I Module code: M F M 2 1
Graduate Attribute assessment:
(GA) (^1 2 3 4 5 6 7 8 9 )
Practical/Assignment number: 1 Group number: 12 Due date: (^2 0 2 0) 0 5 1 5
Lecturer: Mr L Masheane
DECLARATION OF OWN WORK: I, ISAAC DICHABE MOTHIBI, student number 219013421, hereby declare that the content of this practical/assignment report is my work, as defined and constituted in the Rules and Regulations of the Central University of Technology, Free State (Please consult the Programme Guide of the Department). Signed: ID Mothibi Date: 2020/04/
RESULT%
Contents
- Aim:
- Introduction:
- Theory:
- Partial immersion:.............................................................................................................................
- Complete Immersion:.......................................................................................................................
- Apparatus:
- Descriptions of figure 1:...................................................................................................................
- Description of figure 2:.....................................................................................................................
- Description of figure 3:.....................................................................................................................
- Procedure:
- Experimental data:
- Table 1: Dimensions.
- Table 2: Data measured for partial immersion.
- Table 3: Data measured for fully immersion
- Calculations:........................................................................................................................................
- Partial Immersion:
- fully Immersion:...............................................................................................................................
- Additional calculations:
- For partially immersed:
- For fully immersed:.........................................................................................................................
- Results:
- Discussion:
- Conclusion:
- Glossary:..............................................................................................................................................
- Works Cited
Aim: This experiment intends to build and give further understanding of the work done on hydrostatic forces in class. Moreover, it seeks to authenticate the relationship of the resultant force and its point of action (center pressure) on the given equations i.e. this is to say if the formulae are correct theoretically, then both theoretical and experimental results should have less 15% of error. Furthermore, the standard deviation (𝜎) of the measured results, theoretically and experimentally should not far from each other value
Two objectives of this experiment are:
I. To determine the hydrostatic force acting on a plane surface immersed in water when the surface is partially submerged or fully submerged and compare these with the theoretical results II. To determine the position of the line of action of the forces and to compare the positions determined by experiment with the theoretical position.
Introduction: Hydrostatic forces are the resultant force produced when an amount of pressure is applied to a fluid acting on an immersed surface. Calculating the hydrostatic force and the location at which it acts (center of pressure) are fundamental to engineers dealing with hydraulic structures such as levees, flood control gate, fluid storage tanks, and dams. These structures are constructed to store and supply water, they play an important role in the continuance of life on earth. The computing of these structures necessitates the understanding of how forces in fluids behave. These designs require the determination of the resultant force and its points of action, also called the center pressure. Engineers after obtaining this information can design hydraulic structures that can withstand hydrostatic forces. In this experiment, we will be using a submerged quadrant tank (figure) pivoted on a knife-edge. The quadrant is mounted on a balance arm. The hydrostatic force acting on the quadrant when submerged in water, only the force on the rectangular face gives rise to a moment M, about the pivot knife-edge i.e. the knife-edge coincides with the central arc of the quadrant. This moment is counterbalanced by placing known weights on the left end of the apparatus.
Theory: Fluid force is steady at any given depth but is only different when measured vertically [1]. This force is calculated as liquid weight per unit volume multiplied by the depth, a mathematical representation of this is as follows:
Resultant force (R) = 𝐴𝑝𝑔𝑦 (1)
Where:
𝐴 = 𝑏 × 𝑑
𝑝 Is the density of the fluid
𝑔 Is the gravitational constant
For the system to be in equilibrium condition an equal but opposite moment M must be created. A balancing moment is produced by the weight W applied to the hanger at the end of the balance arm.
Counter moment: 𝑀𝑐 = 𝑊 × 𝑙 = 𝑚𝑔
The center pressure for experimental is given by: 𝐷 = 𝑎 + 𝑑 − 𝑦
Because the hydrostatic force's point of action (center of pressure) hits the quadrant's
rectangular face below its center (𝑦̅ = 𝑑 2 )
Hence 𝐷 = 𝑎 + 𝑑 − 𝑦 3 in metre (for Partial immersion) (4)
The theoretical center pressure is given by 𝐷 = 𝐼𝑋 𝐴𝑌^2
𝐼𝑋 is the 2nd^ moment of area of an immersed body about an axis on the free surface. By use of the parallel axes theorem:
𝐼𝑋=𝐼𝐶+𝐴𝑌𝐶 2
where 𝑌𝐶 is the depth of the centroid of the immersed surface, and 𝐼𝐶 is the 2nd^ moment of area of an immersed body about the centroidal axis. Hence:
𝐼𝑋 = 𝑏𝑑
3 12 + 𝑏𝑑(
𝑑 2 )
2 = 𝑏𝑦^2
Hence: 𝐷 = (^) 𝐴𝑌𝐼𝑋 2 = 𝑏𝑦
3 3 ÷^
𝑏𝑦^2 2 + 𝑦̅
Complete Immersion:
Figure 2: Diagram of a fully submerged case. [2]
Where:
b
l
a
d
y
Water
D
force
𝑑 2
W
𝑦𝑐
𝑙 Is the horizontal distance between the pivot point and the mass hanger. 𝑑 Is the depth of water from the base of the tank.
𝑦 Is the water level 𝑏 Is the width of the quadrant face. 𝑎 Is the height from the arm balance to the quadrant.
W is the weight on the hanger (= 𝑚𝑔)
The resultant force (theoretically) is given by:
𝑅 = 𝑝𝑔𝑏(𝑦̅) (6)
Where:
(𝑦 − 𝑑 2 ) = 𝑦 𝑏𝑎𝑟 (𝑦̅)
This force act on the quadrant face about the pivot point, thus inducing a moment M
The moment M can be defined as
M = 𝑅𝑒𝑥𝑝 × 𝐷
Where:
𝐷 = 𝑎 + 𝑑 2 + 𝑑
2 12𝑦̅ (Experimentally)
For the system to be in equilibrium condition an equal but opposite moment M must be created. A balancing moment is produced by the weight W applied to the hanger at the end of the balance arm.
Counter moment: 𝑀𝑐 = 𝑊 × 𝑙 = 𝑚𝑔𝑙
The theoretical center pressure is given by 𝐷 = 𝐼𝑋 𝐴𝑌 + 𝑦̅
𝐼𝑋 is the 2nd^ moment of area of an immersed body about an axis on the free surface. By use of the parallel axes theorem:
𝐼𝑋=𝐼𝐶+𝐴𝑦𝑐
where 𝑌𝐶 is the depth of the centroid of the immersed surface, and 𝐼𝐶 is the 2nd^ moment of area of an immersed body about the centroidal axis. Hence:
𝐼𝑋 = 𝑏𝑑
3 12 (5)
Hence: 𝐷 = (^) 𝐴𝑌𝐼𝑋 + 𝑦̅ = 𝑏𝑑
3 12 ÷ 𝑏𝑑𝑦̅ + 𝑦̅
Figure 2: Vernier Caliper. [4]
Description of figure 2: VIII. The Vernier Caliper is used at the beginning of the experiment to measure the dimensions l, a , and b,d of the quadrant face.
Figure 3: Glass Beaker. [5]
Description of figure 3: IX. The Glass Beaker is used to dispense water into the tank.
Procedure: I. Measure the dimensions b; d of the quadrant end face and the length a and l II. Place the apparatus on a level surface and using the spirit level adjust the feet until the air bubble is in the center of the black circle. [3] III. Add the mass hanger at the left-hand end of the arm balance IV. Balance the arm by adjusting the center balance until the central index mark on the beam reaches the level indicator V. Now start by placing a mass of 40g on the mass hanger and pour water on the tank until the apparatus becomes level and take the reading on the level of water VI. Repeat step 4 by adding a mass of 20g each time for 8 times on the existing masses (These readings should only be for partially submerged) VII. For fully submerged, repeat step 4 but start with a mass of 240g and adding 20g for many 6 times on the existing masses
Experimental data:
Table 1: Dimensions. Measurements a b d l Density ( p) Gravitational constant ( g )
- 1 𝑚 0. 75 𝑚 0. 1 𝑚 0. 275 𝑚 1000 𝑘𝑔. 𝑚−^3 9. 81 𝑚. 𝑠−^2
Table 2: Data measured for partial immersion. 𝑀𝑎𝑠𝑠 𝑖𝑛 𝑘𝑔 𝐷𝑒𝑝𝑡ℎ 𝑖𝑛 𝑚
- 04 0. 038
- 06 0. 0475
- 08 0. 055
- 1 0. 063
- 12 0. 07
- 14 0. 076
- 16 0. 082
- 18 0. 087
Table 3: Data measured for fully immersion 𝑀𝑎𝑠𝑠 𝑖𝑛 𝑘𝑔 𝐷𝑒𝑝𝑡ℎ 𝑖𝑛 𝑚
- 24 0. 105
- 26 0. 11
- 28 0. 115
- 3 0. 12
- 32 0. 125
- 34 0. 13
Calculations: NB: The mass of the weight hanger is ignored right through this report because at the beginning of the experiment when the reference point was marked on the positioning of the balance arm, the weight hanger was included. Meaning that the system at that point was in equilibrium. Any weight, mass at that point equals to zero.
Partial Immersion: A short descriptions of the calculations tabulated in the table below using only the first row:
𝑌 = 100038 𝑅 = 12 𝑝𝑔𝑏𝑦^2
= 0.038 𝑚 = 12 × 1000 × 9.81 × 0.075 × (0.038)^2
= 0.531 𝑁
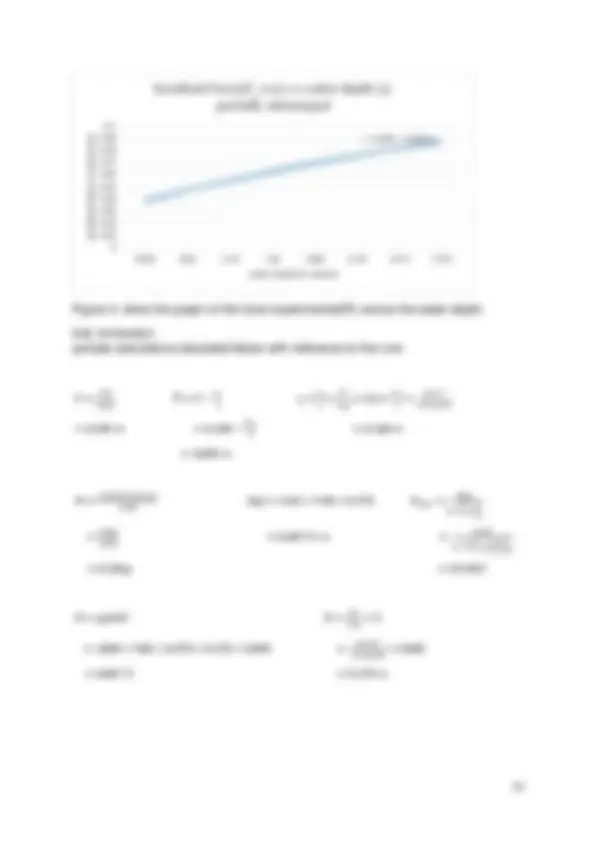
Figure 4: show the graph of the force experimental(R) versus the water depth.
fully Immersion: sample calculations tabulated below with reference to first row:
𝑌 = 1000105 𝑌̅ = 𝑌 − 𝑑 2 𝑎 + 𝑑 2 + 𝑑
2 12𝑦̅ = 0.1 +^
2 +^
(0.1)^2 12×0. = 0.105 𝑚 = 0.105 − 0.1 2 = 0.165 𝑚
= 0.055 𝑚
𝑀 = 𝑠𝑙𝑜𝑡𝑡𝑒𝑑 𝑚𝑎𝑠𝑠𝑒𝑠 1000 𝑀𝑔𝑙 = 0.24 × 9.81 × 0.275 𝑅𝑒𝑥𝑝 = 𝑀𝑔𝑙 𝑎+ 𝑑 2 + (^) 12𝑦̅𝑑^2
= 240𝑔 1000 = 0.647 𝑁. 𝑚 = 0. 0.1+0.1 2 + (^) 12×0.055(0.1)^2 = 0.24𝑘𝑔 = 3.918 𝑁
𝑅 = 𝑝𝑔𝑏𝑑𝑦̅ 𝐷 = 𝑑
2 12𝑦̅ + 𝑦̅
= 1000 × 9.81 × 0.075 × 0.275 × 0.055 = 0.
2 12×0.055 + 0. = 4.047 𝑁 = 0.170 𝑚
y = 0.007x + 0.
0
0.053 0.83 1.113 1.46 1.803 2.125 2.474 2.
resultant force in Newtons
water depth in metres
Resultant force(𝑅_𝑒𝑥𝑝) vs water depth (y) partially submerged
Table 5: tabulated results for fully submersed
𝑌 𝑌̅ 𝑅𝑡ℎ𝑒𝑜𝑟𝑒𝑡𝑖𝑐𝑎𝑙 𝑎 +
𝑑^2
Average: 4. 967 0. 9753 4. 735 0. 9744
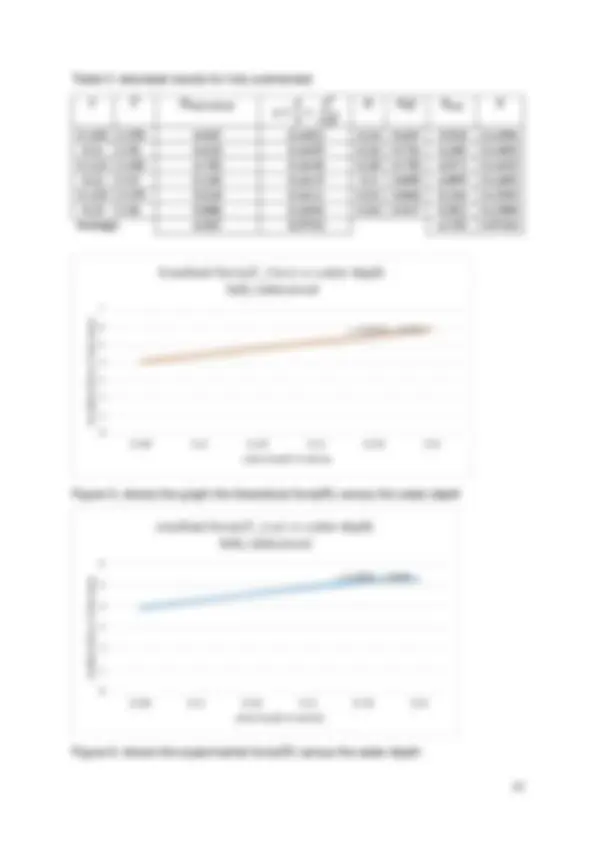
Figure 5: shows the graph the theoretical force(R) versus the water depth
Figure 6: shows the experimental force(R) versus the water depth
y = 0.3678x + 3.
0
1
2
3
4
5
6
7
0.105 0.11 0.115 0.12 0.125 0.
resultant force in Newtons
water depth in metres
Resultant force(𝑅_𝑡ℎ𝑒𝑜) vs water depth fully submersed
y = 0.2838x + 3.
0
1
2
3
4
5
6
0.105 0.11 0.115 0.12 0.125 0.
reultant force in Newtons
water depth in metres
resultant force(𝑅_𝑒𝑥𝑝) vs water depth fully submersed
Results: Table 6: tabulated results for partially immersed.
𝑅𝑡ℎ𝑒𝑜𝑟𝑒𝑡𝑖𝑐𝑎𝑙 (^) 𝑎 + 𝑑 − 𝑌 3
Table 7: tabulated results for a fully immersed.
𝑅𝑡ℎ𝑒𝑜𝑟𝑒𝑡𝑖𝑐𝑎𝑙 𝑎 +
𝑑^2
Discussion: i. The results obtained in the experiment show different values for the experimental results and the theoretical results, the theoretical being the greater. ii. Graphs plotted in each case show a linear relationship between the hydrostatic force and depth of water i.e. an increase in the level of water, will increase the hydrostatic force. iii. Furthermore, an increase in the water level shows that the center of pressure of the force acting on an object goes further below. iv. The standard deviation is used here to show whether the experimental value agrees with the theoretical values. For example, in partially immersed the standard deviation for the theoretical force is 0.847 and that of the experimental value is 0.577, thus taking the difference of the two you get 0.27. This value indicates how much the experimental force falls outside the range of the expected value. v. The percentage error in this experiment is acceptable because three of the calculated percentage error fall under the standard accepted percentage error of 15%. Except one, where we got an outrageous value of 316.792% error.
vi. The value we got when dividing the percentage error by the number of values in the results i.e. 4.671% 6 = 0.779%. The value 0.779% show by average the percentage error in each of the 6 individual results. vii. There are some sources of error that took place during the experiment which affected the result we obtained and these are: Parallax error, this error occurs when taking the readings of the water level and to overcome this error the observer's eyes must be perpendicular to the water level when taking a reading. Another source of error occurs because the marks on the level indicator we not visible, therefore it was difficult to tell if the balance arm had reached equilibrium/reference point after dispensing the water. To overcome this error, the university, need to update their equipment. Another error comes from the use of the accepted density of water, 1000𝑘𝑔. 𝑚−3^ for calculating the hydrostatic force. The value is the density of water at sea level and 4℃. To overcome this error, we should have used the density of the tap water we used. Another source of error is the gravitational constant, 9.81𝑚. 𝑠−2^ , this value is accepted theoretically but in practicality, gravitational constant differs from location to location. To resolve this, we should have measured the gravitational constant at our location and used it.
Conclusion:
From the experiment that has been done, we can conclude that the experiment was successfully carried out even though there is a difference in the theoretical value and experimental value. From the graph that we created, we can depict that there is a linear association between the hydrostatic force and the depth of water in both partially and fully submerged. Three of our calculated percentage errors are below 15% error stipulated in our hypothesis, also there isn’t much difference in our calculated standard deviation in each of the cases. To make these results more reliable next time, each measurement should be done twice and the average of the two recorded. We hope the lecture will advise the university of our recommendation for updating their equipment.
Works Cited
[1] J. F. DOUGLAS and R. D. MATTHEWS, FLUID MECHANICS, HARLOW: PEARSON PRENTICE HALL, 1996.
[2] L. Masheane, “Lab guide MFM21A,” central university of technology, bloemfontein, 2020.
[3] A. H and M. S, “Applied fluid mechanis lab guide,” Mavs open press, Texas, 2018.
[4] (^) “vectorstock,” VectorStock Media, 2020. [Online]. Available: https://www.vectorstock.com/royalty-free-vector/caliper-outline-drawing-vector-
- [Accessed 20 04 2020].
[5] J. V.J, “indiamart,” Jainsons India Regd, 1989. [Online]. Available: https://www.indiamart.com/vardhmanelectron/laboratory-glass-ware.html. [Accessed 24 20 2020].
[6] B. J.M and D. Altman, "measurement error," statistics notes, vol. 313, no. 21, p. 774, 1996.