Download Lecture 11: Linear and Rectilinear Kinematics - Velocity, Acceleration, and Displacement and more Study Guides, Projects, Research Kinematics in PDF only on Docsity!
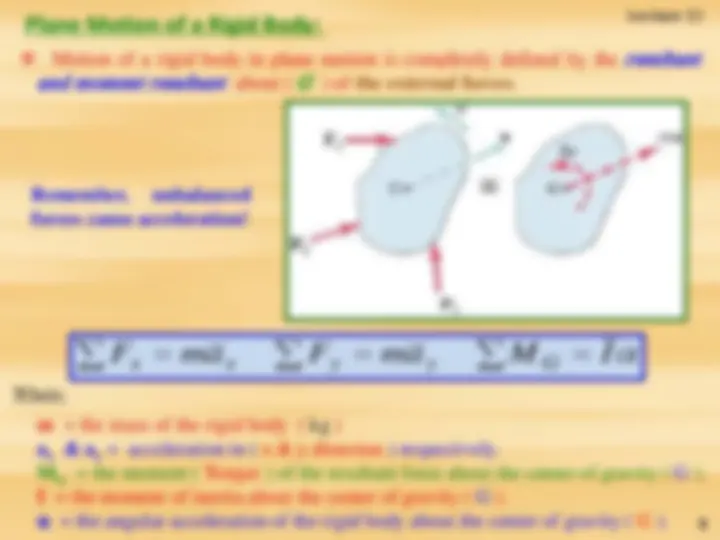
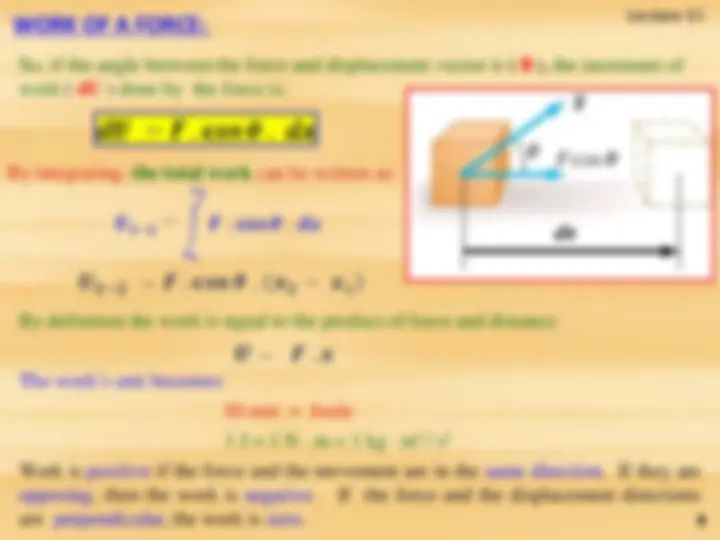
Introduction & Rectilinear Kinematics:
Lecture 11
Statics: The study of
bodies in equilibrium.
Dynamics:
- Kinematics – concerned with
the geometric aspects of motion
without any reference to the cause of
motion.
- Kinetics - concerned with the
forces causing the motion
Mechanics: The study of how bodies
react to forces acting on them.
Scalars: are quantities which are fully described by a magnitude alone.
eg : distance , mass ,time ,volume etc
Vectors: are quantities which are fully described by both a magnitude and a direction.
eg: displacement , velocity , force ,acceleration etc.,
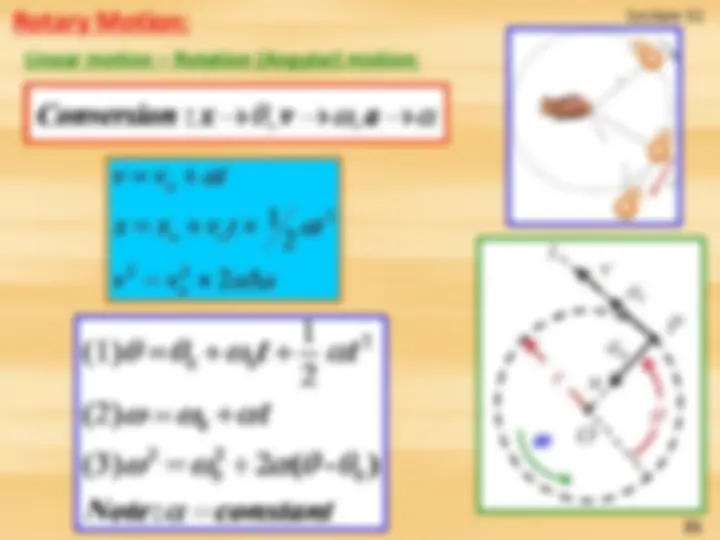
Introduction & Rectilinear Kinematics: Lecture 11
Linear motion : when a body moves either in a straight line or along a curved
path, then we say that it is executing linear motion.
1. when a body moves in a straight line then the linear motion is called
rectilinear motion.
eg ., an athlete running a 100 meter race along a straight track is said to be a
linear motion or rectilinear motion.
2. when a body moves along a curved in two or three dimensions path then the
linear motion is called cur vilinear motion.
eg., the earth revolving around the sun.
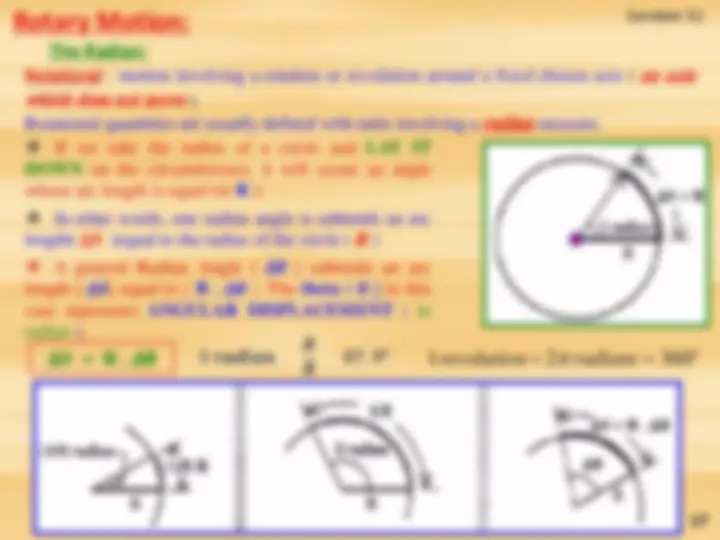
Rotatory motion: A body is said to be in rotatory motion when it stays at one
place and turns round and round about an axis.
example: a rotating fan, a rotating pulley about its axis.
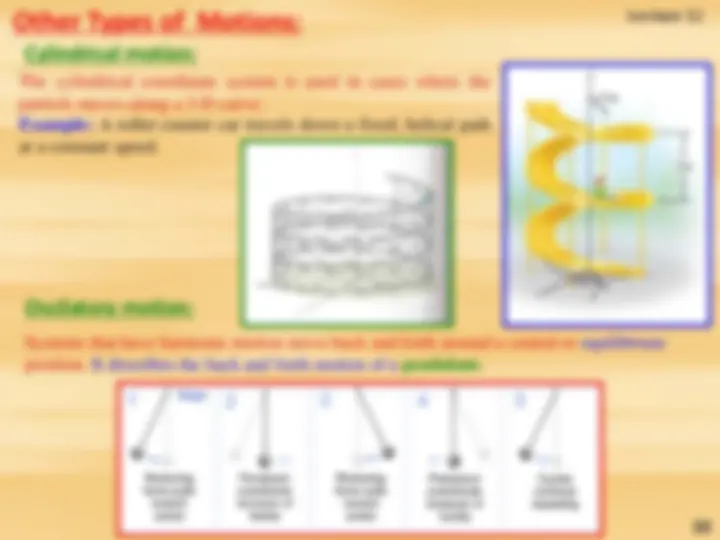
Oscillatory motion : a body is said to be in oscillatory motion when it swings to
and fro about a mean position.
example: the pendulum of a clock, the swing etc.,
4
Rectilinear Kinematics: Continuous Motion Lecture 11
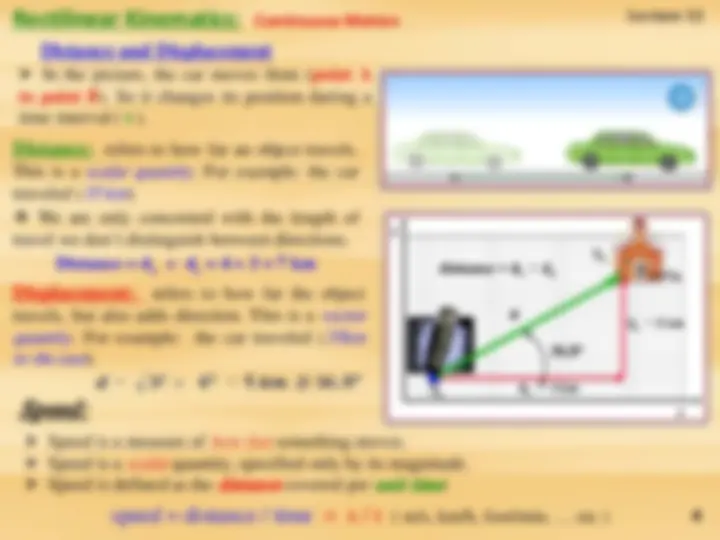
In the picture, the car moves from ( point A to point B ). So it changes its position during a time interval ( t ).
Distance and Displacement
Displacement: refers to how far the object
travels, but also adds direction. This is a vector
quantity. For example: the car traveled (35km
to the east).
Distance: refers to how far an object travels.
This is a scalar quantity. For example: the car
traveled (35 km).
We are only concerned with the length of travel we don’t distinguish between directions.
Distance = dx + dy = 4 + 3 = 7 km
36.8 o
Speed:
Speed is a measure ofhow fast something moves.
Speed is ascalar quantity, specified only by its magnitude.
Speed is defined as thedistance covered perunit time:
speed = distance / time = x / t ( m/s, km/h, foot/min, … etc )
Aver age Speed: Lecture 11
Average speed is thewhole distance covered divided bythe total time of travel. General
definition: Average speed = total distance covered / time interval
Distinguish betweeninstantaneous speed andaverage speed:
- On most trips, we experience a variety of speeds, so the average speed and instantaneous speed are often quite different.
Instantaneous Speed:
The speed at any instant is theinstantaneous speed.
The speed registered by an automobile speedometer is
theinstantaneous spee d.
Example 1: If we travel 320 km in 4 hours, what is our average speed? If we drive at this
average speed for 5 hours, how far will we go?
Answer: vavg = 320 km/4 h = 80 km/h.
d =vavg x time = 80 km/h x 5 h = 400 km.
Example 2: A plane flies 600 km away from its base at 200 km/h, then flies back to its base
at 300 km/h. What is its average speed?
Answer: total distance traveled,d = 2 x 600 km = 1200 km;
total time spent ( for the round trip):
t = (600 km / 200 km/h) + (600 km / 300 km/h) = 3 h + 2 h = 5 h.
Average speed,vavg =d / t = 1200 km/5 h = 240 km/h.
Acceleration: Lecture 11
Acceleration is the rate of change in the velocity of a particle. It is a vector
quantity. Typical units are m/s^2 or ft/s 2.
Theinstantaneous acceleration is the time derivative of velocity. Consider particle with velocity ( v ) at time (t ) and (v’ ) at ( t + ∆t ):
Instantaneous acceler ation
t
v
a
t ∆
∆ → 0
lim
Acceleration can be positive ( speed increasing ) or negative ( speed decreasing ).
t
dt
dv
a
v t t
dt
d x
dt
dv
t
v
a
t
e.g. 12 3
lim
2
2
2
0
∆ →
From the definition of a derivative:
The derivative equations for velocity and acceleration can be manipulated to get:
dx
v
dt
dv
a
dt
2 2
d x
a
dt
dv dv dx dv
a v
dt dx dt dx
= = = a. dx = v dv
Var iable acceler ation
8
Constant Acceleration:
Lecture 11
The three kinematic equations can be integrated for the special case when
acceleration is constant ( a = a (^) c ) to obtain ver y useful equations. A common
example of constant acceler ation is gr avity; i.e., a body freely falling toward earth.
In this case, (a (^) c = g = 9.81 m/s 2 = 32.2 ft/s 2 ) downward. These equations are:
constant
0 0
v v a x x
a vdv a dx v v a x x
dx
dv
v
x
x
v
v
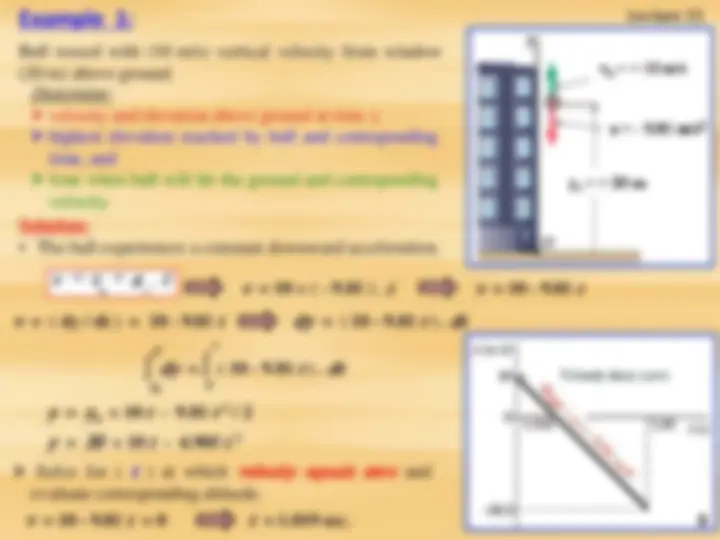
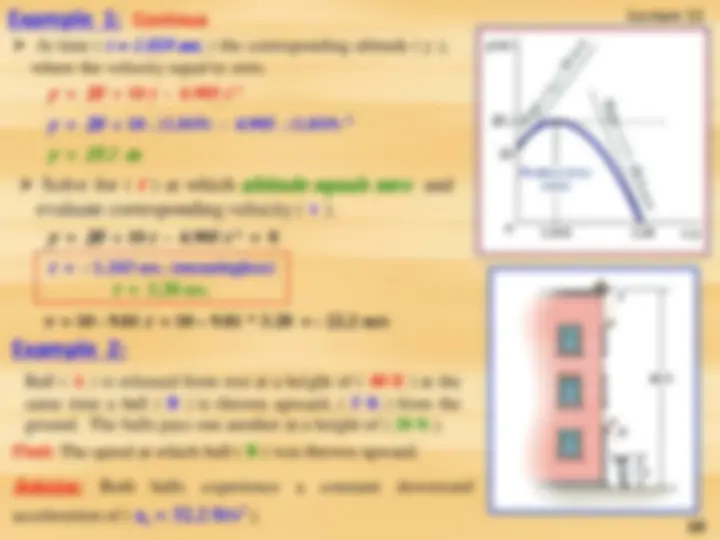
Example 1 : Continue Lecture 11
y = 20 + 10 t - 4.905 t^2
At time (t = 1.019 sec. ) the corresponding altitude ( y ),
where the velocity equal to zero.
y = 20 + 10. (1.019) - 4.905. (1.019) 2
y = 25. 1 m
Solve for ( t ) at which altitude equals zero and
evaluate corresponding velocity ( v ).
y = 20 + 10 t - 4.905 t^2 = 0
v = 10 - 9.81 t = 10 – 9.81 * 3.28 = - 22.2 m/s
t = - 1.243 sec. (meaningless)
t = 3.28 sec.
Example 2 :
Ball ( A ) is released from rest at a height of ( 40 ft ) at the same time a ball ( B ) is thrown upward, ( 5 ft ) from the ground. The balls pass one another at a height of ( 20 ft ). Find: The speed at which ball ( B ) was thrown upward.
Solution: Both balls experience a constant downward
acceleration of ( a c = 32.2 ft/s 2 ).
Example 2 : Continue Lecture 11
1) Fir st consider ball A. With the origin defined at the
ground, ball ( A ) is released from rest [ (vA ) (^) o = 0 ]
at a height of ( 40 ft ), [ (sA ) o = 40 ft ]. Calculatethe
time required for ball ( A ) to drop to ( 20 ft ), [ sA =
20 ft ] using a position equation.
sA = ( sA ) o + ( v a ) o. t + (1/2) a c. t 2
20 ft = 40 ft + (0). (t) + (1/2). (-32.2). (t 2 )
t = 1.115 s
2) Now consider ball B. It is throw upward from a height of ( 5 ft ) [ (sB ) (^) o = 5 ft ]. It must reach a height of ( 20 ft ) [ sB = 20 ft ] at the same time ball ( A ) reaches this height ( t = 1.115 s ). Apply the position equation again to ball ( B ) using ( t = 1.115 sec ).
sB = (sB) o + (v B) o. t + (1/2). a c. t 2
20 ft = 5 + (v B) o. (1.115) + (1/2). (-32.2). (1.115)^2
(v B) o = 31.4 ft/s
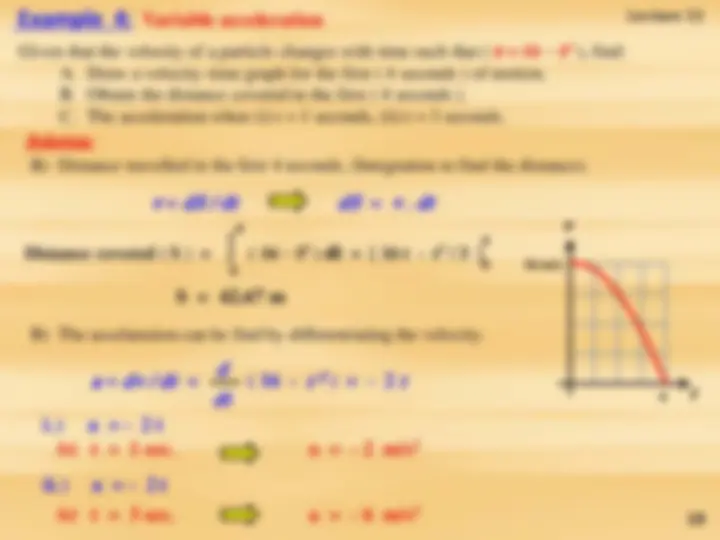
Example 4: Variable acceleration^ Lecture 11
Given that the velocity of a particle changes with time such that ( 𝑣 = 16 − 𝑡^2 ), find: A. Draw a velocity-time graph for the first ( 4 seconds ) of motion. B. Obtain the distance covered in the first ( 4 seconds ). C. The acceleration when (i) t = 1 seconds, (ii) t = 3 seconds.
Solution:
v
t
16 m/s
4
B) Distance travelled in the first 4 seconds, (Integration to find the distance).
v = dS / dt dS = v. dt
Distance covered ( S ) = ∫ ( 16 − 𝑡^2 ) 𝑑𝑡 = [ 16 t - t 3 / 3 ]
0
4
0
4
S = 42.67 m
a = dv / dt = ( 16 - t 2 ) = - 2 t
d dt
i. ) a = - 2 t
ii.) a = - 2 t
At t = 1 sec. a = - 2 m/s 2
At t = 3 sec. a = - 6 m/s 2
B) The accelaration can be find by differentiating the velocity.
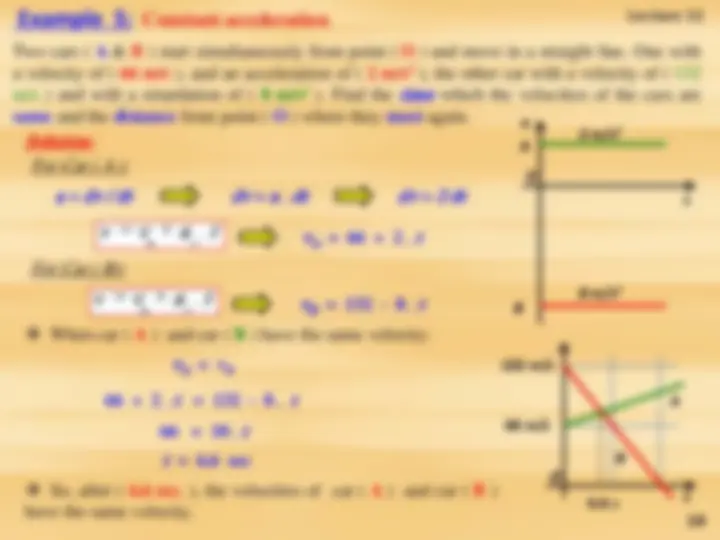
Example 5: Constant acceleration^ Lecture 11
Two cars ( A & B ) start simultaneously from point ( O ) and move in a straight line. One with a velocity of ( 66 m/s ), and an acceleration of ( 2 m/s^2 ), the other car with a velocity of ( 132
m/s ) and with a retardation of ( 8 m/s^2 ). Find the time which the velocities of the cars are
same and the distance from point ( O ) where they meet again. (^) a
t
2 m/s^2
8 m/s^2
O
Solution:
For Car ( A ):
A
B
a = dv / dt dv = a. dt dv = 2 dt
vA = 66 + 2. t
For Car ( B):
vB = 132 - 8. t
When car ( A ) and car ( B ) have the same velocity:
vA = vB
66 + 2. t = 132 - 8. t
66 = 10. t
t = 6.6 sec
So, after ( 6.6 sec. ), the velocities of car ( A ) and car ( B ) have the same velocity.
A
132 m/s
O
66 m/s B
6.6 s^ t
Lecture 12
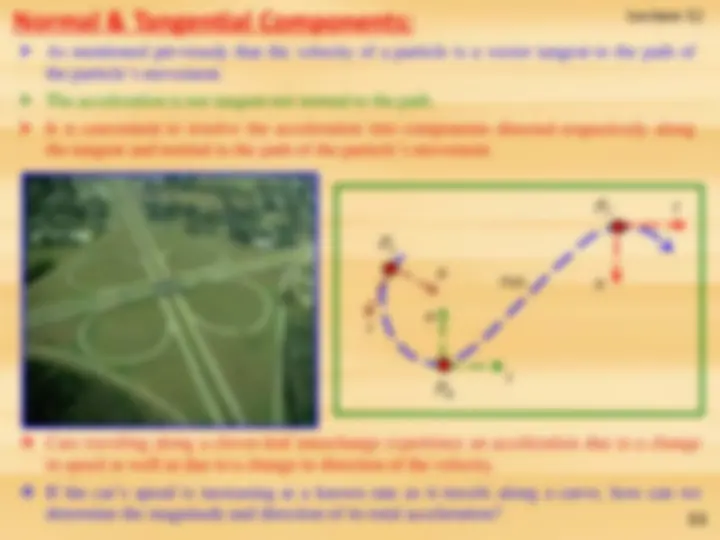
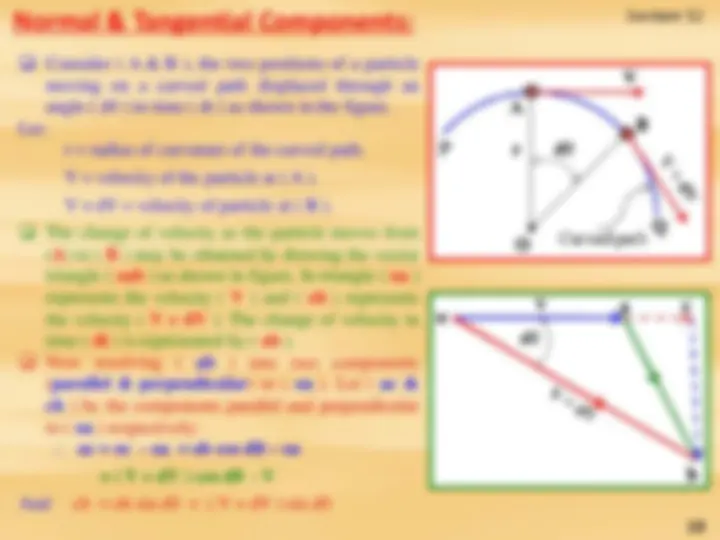
Curvilinear Motion:
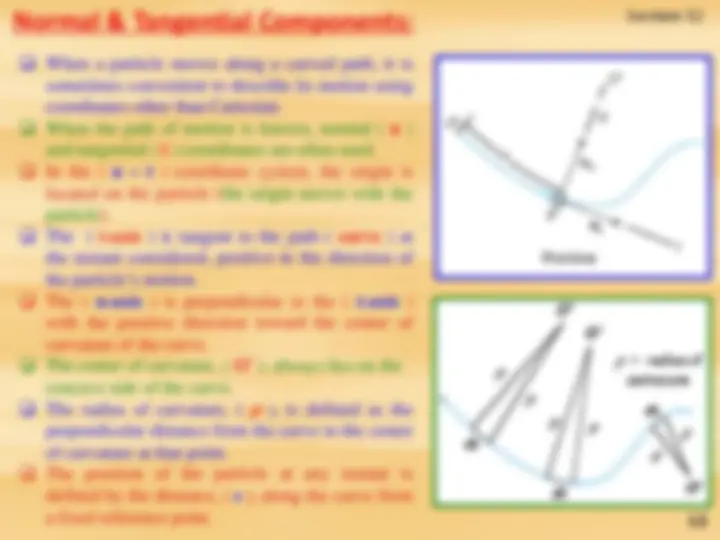
When a Par ticle moving along a curve other than a str aight line, we say that the par ticle is in cur vilinear motion.
Coordinates Used for Describing the Plane Curvilinear Motion:
The motion of a particle can be described by using three coordinates, these are:
- Rectangular coordinates.
- Normal – Tangential coordinates.
- Polar coordinates.
Rectangular coordinates
Normal-Tangential coordinates
Polar coordinates
y
x
P
t
n
PA
PB
PC
t
n
t
n
y
x
P
r
θ r
Path
Path
Path
O^ O
Vx
Vy^ V^ V
Plane Curvilinear Motion – without Specifying any
Coordinates:
(Displacement)
Lecture 12
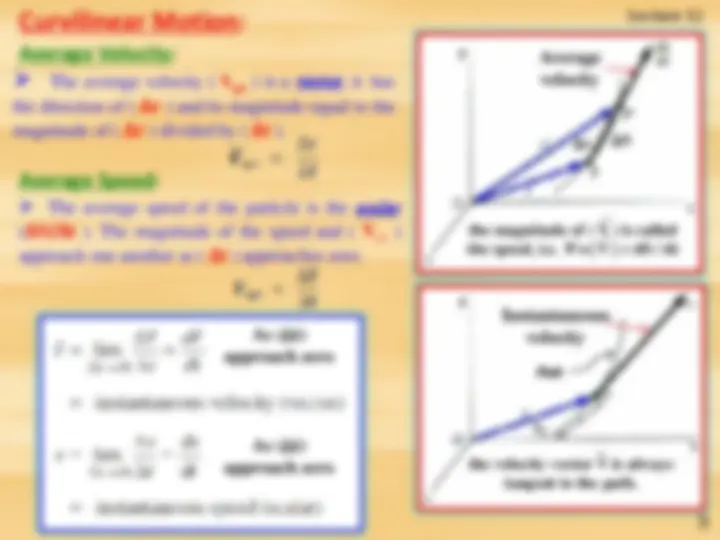
Position:
The position of the particle measured from a fixed point ( O ) will be designated by the
position vector [r = r (t ) ].
This vector is a function of time (t ), since in general both its magnitude and direction
change as the particle moves along the curve path.
Suppose that particle which
occupies position ( P ) defined by
(r ) at time (t) moving along a curve
a distance ( ∆S ) to new position (P’)
defined by (r ’ = r + ∆r ) at a time
(t + ∆t ).
(∆r = r ’ – r = displacement).
Note: Since, here, the particle
motion is described by two
coordinates components, both the
magnitude and the direction of
the position, the velocity, and the
acceleration have to be specified.
P at time t
r (t) ∆ r^ P^ at time t+∆t
r (t+∆t)
O
∆s
Actual distance traveled by the particle (it is s scalar)
The vector displacement of the particle
r ( t )
r ( t + ∆ t )
∆ r
∆ S P at time (t + ∆ t)
P at time (t)
Path
4
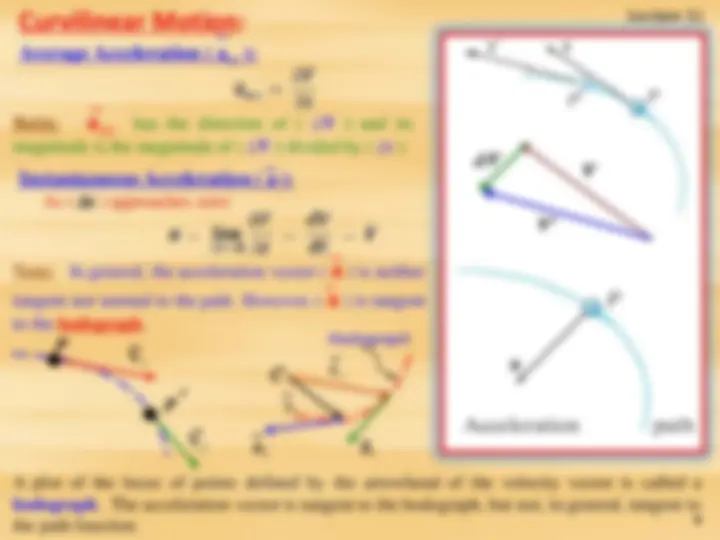
Curvilinear Motion: Lecture 12
V
V’
∆V
Average Acceleration ( a av ):
_
Note: a av has the direction of ( ∆ V ) and its
magnitude is the magnitude of ( ∆ V ) divided by ( ∆t ).
_
Instantaneous Acceleration ( a ):
_
As ( ∆ t ) approaches zero:
Note: In general, the acceleration vector ( a ) is neither
tangent nor normal to the path. However, ( a ) is tangent
to the hodograph.
_
_
P
P
V 1
V 2
_
_
C
Hodograph V 1
V 2
a 2 a 1
_
_
_ _
A plot of the locus of points defined by the arrowhead of the velocity vector is called a hodograph. The acceleration vector is tangent to the hodograph, but not, in general, tangent to the path function.
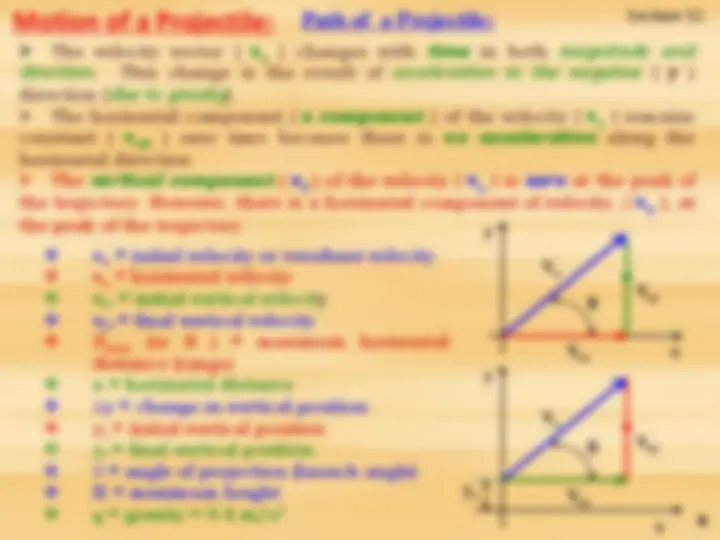
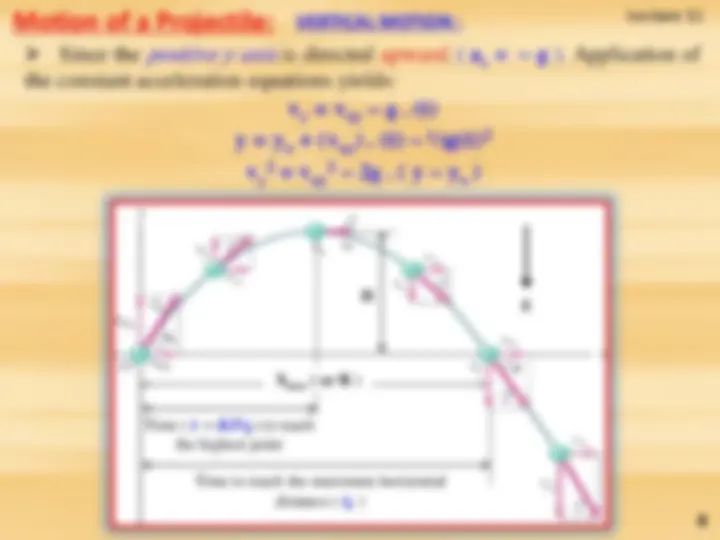
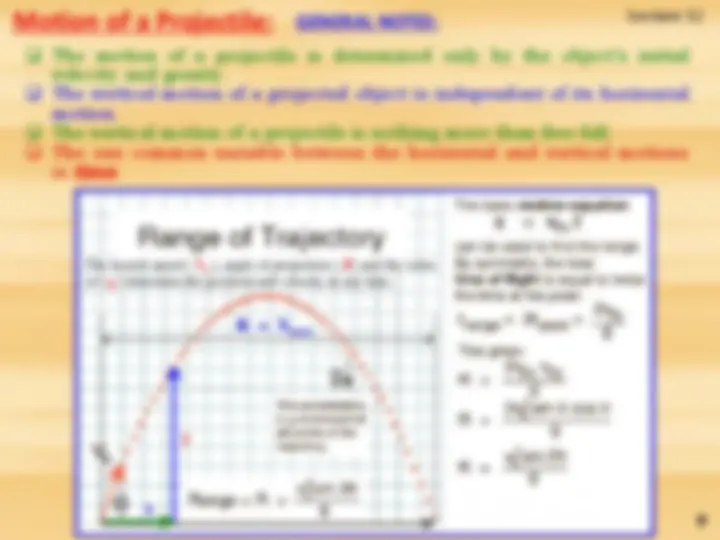
Motion of a Projectile:^ Lecture 12
Projectile motion can be treated as two rectilinear motions , one in the horizontal
direction ( constant velocity ) experiencing zero acceler ation and the other in the vertical direction experiencingconstant acceler ation (i.e., gr avity).