



Robotics
The science of robots.
Humans working in this area are
called Roboticists.
docsity.com



Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Explore the fascinating world of robotics through this comprehensive document. Learn about different types of robots, essential terminology, and important characteristics such as degrees of freedom, speed, load bearing capacity, accuracy, and repeatability. Discover manipulators, legged robots, and wheeled robots, and delve into robotics terminology including manipulator, end-effector, workspace, position, orientation, link, joint, kinematics, dynamics, sensor, actuator, speed, load bearing capacity, accuracy, and repeatability.
Typology: Slides
1 / 12

This page cannot be seen from the preview
Don't miss anything!
1.Manipulators
“A mechanism, usually consisting of a series of
segments,
jointed
or
sliding
relative
to
one
another,
for
the
purpose
of
grasping
and
moving
objects
usually
in
several
degrees
of
freedom.
It
may
be
remotely
controlled
by
a
computer or by a human."
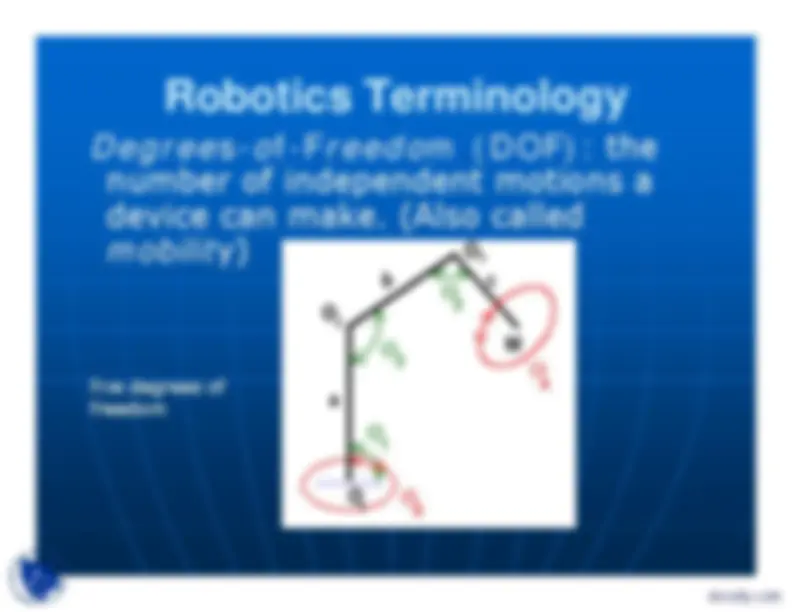
five degrees offreedom
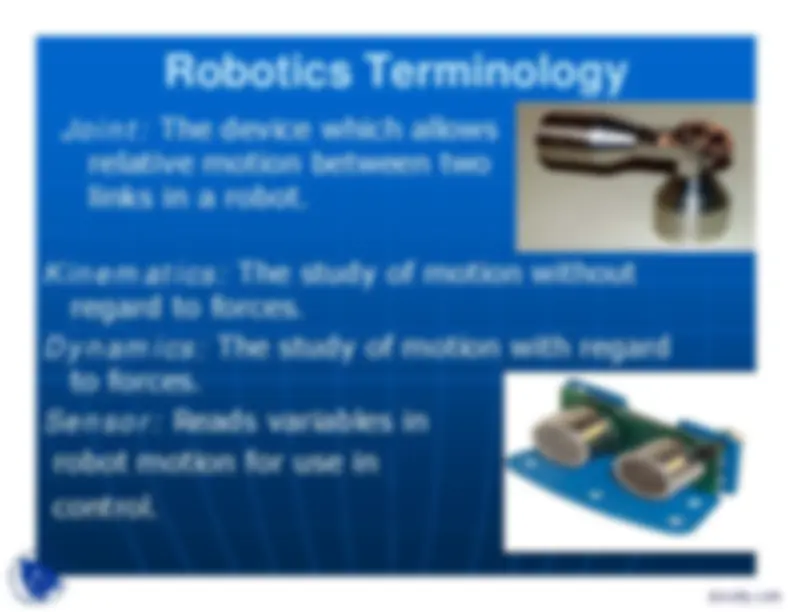
Robotics Terminology
End
- effector:
The tool, gripper,
or other device mounted at theend of a manipulator, foraccomplishing useful tasks Workspace:
The volume in space that a robot’s end-
effector can reach, both in position and orientation Position:
The translational (straight-line) location of
something. Orientation:
The rotational (angle) location of
something. Link:
A rigid piece of material connecting joints in a
robot
position without making a mistake.
the robot to position itself to the desiredlocation with the minimal error (usually 25mm).
itself when asked to perform a task multipletimes.