



Data Acquisition and Control Systems
Engr. Dr. Sufyan Ali Memon
Assistant Professor
Mehran University of Engineering & Technology Jamshoro, Pakistan
Lecture-12-13
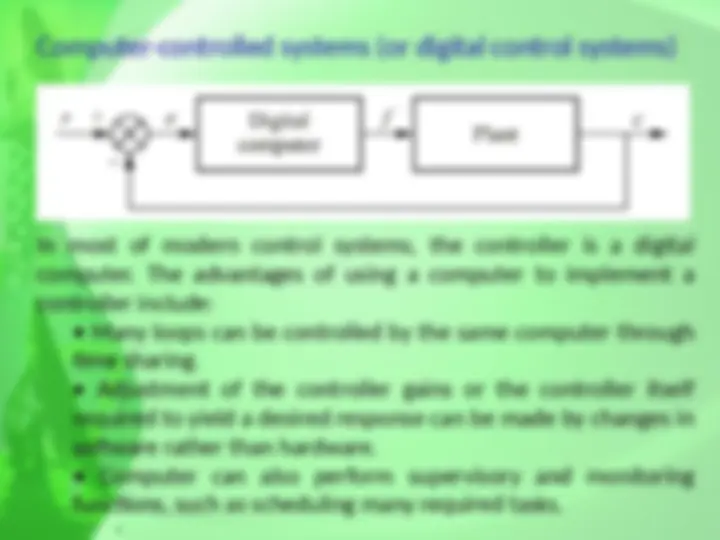
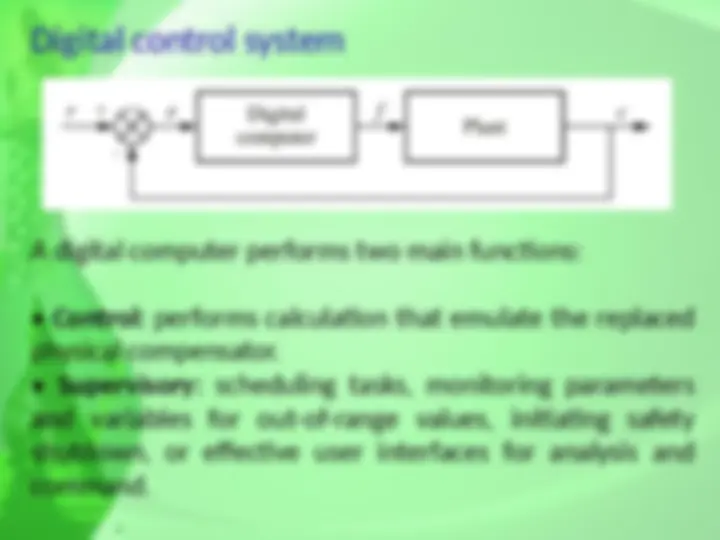
Introduction to digital control systems
1













Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Introduction to digital control system
Typology: Lecture notes
1 / 43

This page cannot be seen from the preview
Don't miss anything!
Assistant Professor Mehran University of Engineering & Technology Jamshoro, Pakistan
1
What is control? What is control? Control is whenever some quantity, such as temperature, altitude, or speed must be made to behave in some desirable way over time. In other words, control makes some object (called plant or process) behave in some desirable manner. What is a control system? A control system consists of subsystems and a process, assembled for the purpose of controlling the output of the process. For example, an electric furnace produces heat as a result of electricity.
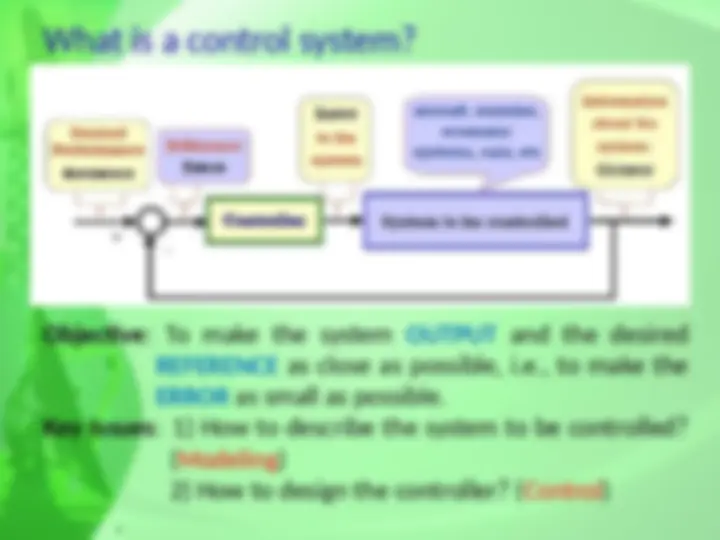
What is a control system? Objective : To make the system OUTPUT and the desired REFERENCE as close as possible, i.e., to make the ERROR as small as possible. Key Issues : 1) How to describe the system to be controlled? (Modeling)
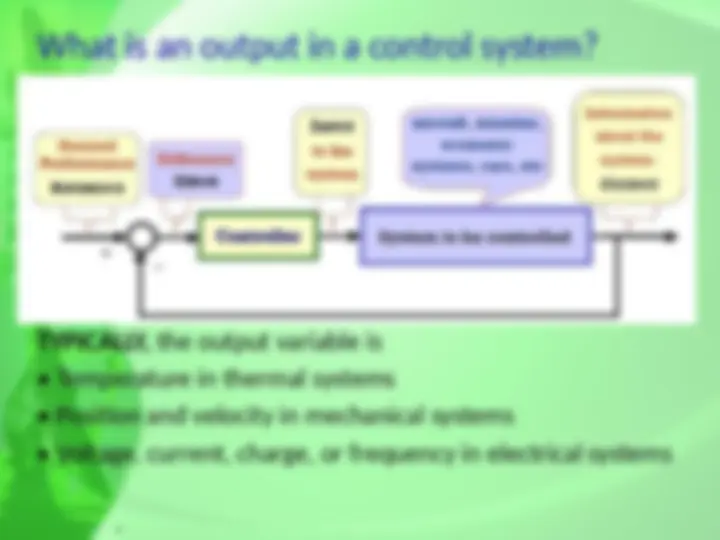
What is an output in a control system? TYPICALLY, the output variable is
What is automatic control?
Why do you need control (or a control system)? We build control systems for five primary reasons:
Examples of open-loop control systems Example 1: Toaster The output of a toaster is the color of the toast. The device is designed with the assumption that the toast will be darker the longer it is subjected to heat. The toaster does not measure the color of the toast; it does not correct for the fact that the toast is rye or white, nor does it correct for the fact that toast comes in different thicknesses. Example 2: Examination system Assume that you calculate the amount of time you need to study for examination that covers three chapters to get an A. If we add a fourth chapter - a disturbance - you are an open-loop system if you do not detect the disturbance and add study time to that previously calculated. The result of this oversight would be a lower grade than you expected.
The disadvantage of open-loop systems that are sensitive to disturbances and thus not able to correct for these disturbances may be now overcome in closed-loop systems. However, closed-loop systems are more complex and expensive than open-loop systems.
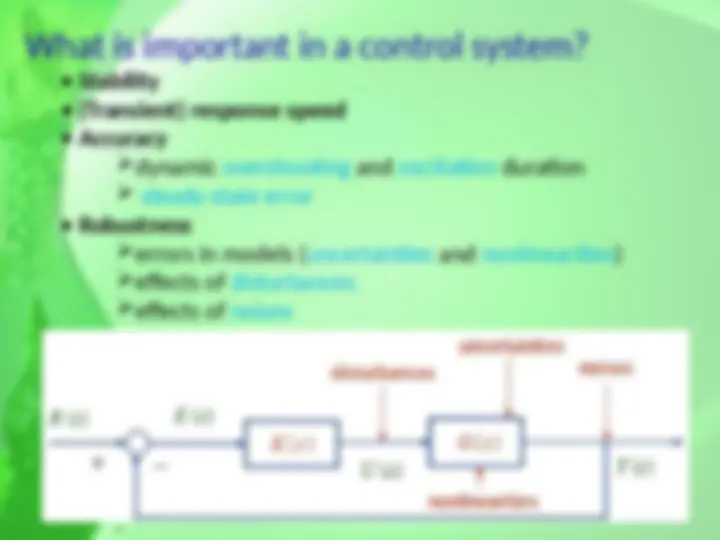
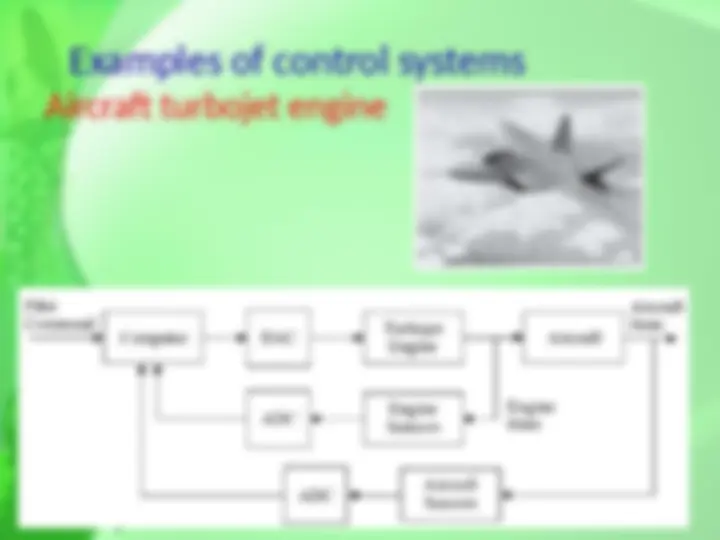
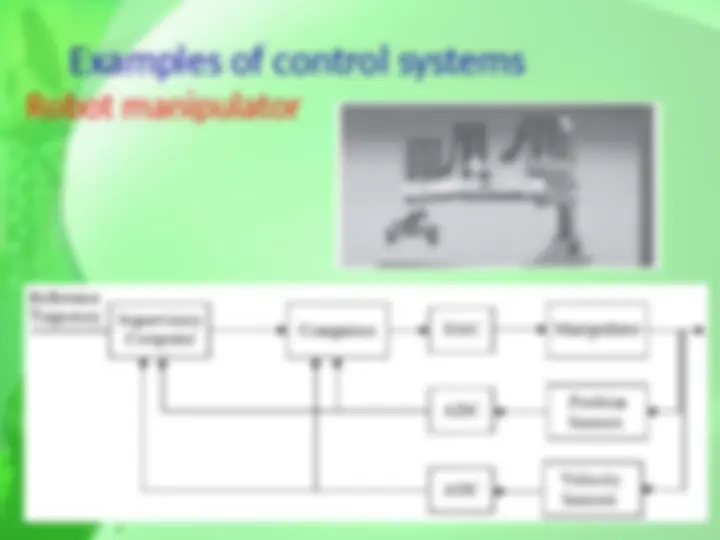
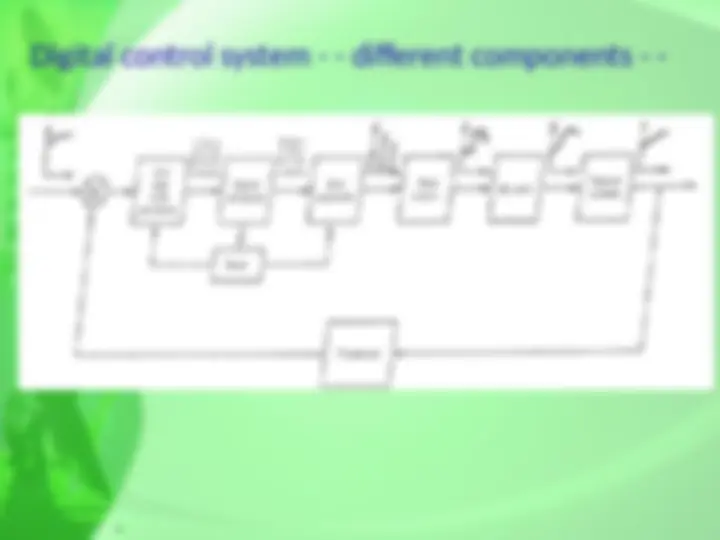
A typical control system
Terminology
Control system analysis and design objectives Elevator example Summary: A control system is dynamic; It responds to an input by undergoing a transient response before reaching a steady-state response that generally resembles to the input. Transient response is important. a slow response makes elevator passengers impatient, whereas an excessively rapid response makes them uncomfortable. If the elevator oscillates about the arrival floor for more than a second, a disconcerting feeling can result. Transient response is also important for structural reason: Too fast a transient response could cause a permanent physical damage. Thus, we analyze the elevator for its transient response and (if needed) we adjust parameters or design components to yield desired transient response. The steady-state response of the elevator is its location reached near the fourth floor. An elevator must be level enough with the floor for the passengers to exit. Thus, the elevator’s steady-state error should be analyzed and (if needed) design corrective action to reduce the steady- state error should be taken.
Control system analysis and design objectives Elevator example STATEMENT: Discussion of transient response and steady-state error is moot if the system does not have stability. Actually, the total response of a system is Total response = Natural response + Forced response For a control system to be stable, the natural response must eventually approach zero, thus leaving only the forced response, which is an approximation of the input. BE CAREFUL: If the natural response grows without bound the system is no longer controlled or unstable. Instability could lead to self-destruction of the physical device if limit stops are not part of the design. In our example, the elevator would crash through the floor or exit through the ceiling. Thus, a control system must be analyzed and designed to be stable. NOTICE THAT: The transient response is the sum of natural and forced responses when the natural response is large, while the steady-state response is the sum of the natural and forced responses when the natural response is small.
There are tons of research published in the literature on how to design control laws for various control purposes. These can be roughly classified into the following techniques:
Other considerations in control system analysis and design