Download La Rotation dans le Plan: Définition, Propriétés et Applications and more Lecture notes Mathematics in PDF only on Docsity!
1Bac SM F
LA ROTATION DANS LE PLAN
I) RAPPELLES ET COMPLEMENTS
1) La symétrie axiale.
Définition
Soit (𝐷) une droite donnée. On dit que le point 𝑀′ est le symétrique du point 𝑀 par rapport à (𝐷) si :
′
= 𝑀 si 𝑀 ∈ (𝐷)
(𝐷) est la médiatrice du segment [𝑀𝑀′], si 𝑀 ∉ (𝐷).
La relation qui lie le point 𝑀 à 𝑀′ s’appelle la symétrie axiale d’axe (𝑫) ; se notre par 𝑆
(𝐷)
On écrit : 𝑆
(𝐷)
Remarques :
Si 𝑀 ∉ (𝐷) alors 𝑀
′
(𝐷)
≠ 𝑀 et (𝐷) est la médiatrice du segment [𝑀𝑀′]
c’est-à-dire passe par 𝐼 milieu de [𝑀𝑀′] et perpendiculaire à (𝑀𝑀
′
Si 𝑁 ∈ (𝐷) alors 𝑆
( 𝐷
)
(𝑁) = 𝑁 on dit que 𝑁 est invariant par 𝑆
( 𝐷
)
Inversement si un point 𝑁 est invariant par 𝑆 ( 𝐷
)
alors 𝑁 ∈ (𝐷)
Propriétés :
La symétrie axiale conserve :
Les distances : si 𝑀
′
( 𝐷
)
(𝑀) et 𝑁
′
( 𝐷
)
(𝑁) alors 𝑀𝑁 = 𝑀′𝑁′
Le milieu d’un segment et en générale le barycentre d’un système pondéré.
les mesures des angles géométriques
Le coefficient de colinéarité de deux vecteurs.
La symétrie axiale inverse les mesures des angles orientés : (𝐴𝐵
′
′ ⃗⃗⃗⃗⃗⃗⃗⃗
, 𝐴
′
′ ⃗⃗⃗⃗⃗⃗⃗⃗
) [ 2 𝜋]
Propriété :
La symétrie axiale 𝑆
(Δ)
est une bijection et sa bijection réciproque est elle-même
Preuve :
( Δ
)
′
( Δ
)
′
C.R.P.T.A
1Bac SM F La rotation dans le plan
2 ) Les angles orientés
Définition :
Soient 𝑢⃗ et 𝑣 deux vecteurs non nuls ; et soient 𝐴 et 𝐵 deux points du plan orienté tels que 𝑢⃗ = 𝑂𝐴
et 𝑣 = 𝑂𝐵
l’angle orienté des demis droites [𝑂𝐴) ; [𝑂𝐵) s’appelle aussi angle orienté des vecteurs 𝑢⃗ et 𝑣 et on le note par :
. la mesure de l’angle orienté (𝑢⃗ , 𝑣 )
est la mesure de l’angle orienté (
[
[
) et se note par (𝑢⃗ , 𝑣
Propriétés :
Soient 𝑢⃗ , 𝑣 et ℎ et 𝑘 deux réels non nuls ; on a :
) [ 2 𝜋]
si ℎ𝑘 > 0 alors : (ℎ𝑢⃗ , 𝑘𝑣
) [ 2 𝜋]
si ℎ𝑘 < 0 alors : (ℎ𝑢⃗ , 𝑘𝑣
) [ 2 𝜋]
Propriété :
Soient (𝐷) et (Δ) deux droites de vecteurs directeurs respectifs 𝑢⃗ et 𝑣
et qui se coupent en 𝐴, soient 𝐵 un point de (𝐷) et 𝐶 un point de
On a : 2 (𝐴𝐵
) [ 2 𝜋]
Preuve :
D’après la propriété précédente : On a (𝐴𝐵
[ 2 𝜋]
ou (𝐴𝐵
) [ 2 𝜋]
et dans les deux cas : 2 (𝐴𝐵
) [ 2 𝜋]
C.R.P.T.A
1Bac SM F La rotation dans le plan
2) Propriétés de la rotation
2.1 La décomposition d’une rotation
Soit 𝑅 la rotation de centre 𝑂 et d’angle 𝛼
(Δ) une droite quelconque qui passe par 𝑂 et (Δ
′
) l’image de (Δ) par la rotation 𝒓 de
centre 𝑶 et d’angle
𝜶
𝟐
D’après ce qui précède (𝑆 ( Δ′
)
( Δ
)
) est la rotation de centre 𝑂 et d’angle 2 ×
𝛼
2
Donc : 𝑺 ( 𝚫′
)
( 𝚫
)
= 𝑹. (figure 1)
figure 1 figure 2
(Δ) une droite quelconque qui passe par 𝑂 et (Δ
′
) l’image de (Δ) par la rotation 𝒓 de centre 𝑶 et d’angle
−𝜶
𝟐
D’après ce qui précède (composition de deux symétries axiales) (𝑆 (Δ)
(Δ′)
) est la rotation de centre 𝑂 et d’angle 2 ×
𝛼
2
Donc : 𝑺 (𝚫)
(𝚫′)
= 𝑹. (figure 2)
Propriété
Soit 𝑅 la rotation de centre 𝑂 et d’angle 𝛼 ; la rotation 𝑅 peut-être décomposée comme suite :
( 𝚫′
)
( 𝚫
)
où (Δ
′
) l’image de (Δ) par la rotation 𝒓 de centre 𝑶 et d’angle :
𝜶
𝟐
(𝚫)
(𝚫′)
où (Δ
′
) l’image de (Δ) par la rotation 𝒓 de centre 𝑶 et d’angle:
−𝜶
𝟐
2.2 Propriété d’une rotation.
Puisque toute rotation est la composition de deux symétries axiales on peut en déduire les propriétés suivantes :
o La rotation est une isométrie (elle conserve les distances) : si {
′
′
o La rotation conserve le coefficient de colinéarité de deux vecteurs et par suite conserve la linéarité des points
o La rotation conserve le milieu et le barycentre d’un système pondéré.
o La rotation conserve les mesures des angles géométriques
o La rotation conserve les mesures des angles orientés (les deux symétries qui composent la rotation inversent les
mesures des angles orientés)
Pr. BOUARI Souaad
C.R.P.T.A
1Bac SM F La rotation dans le plan
Application :
Soient 𝑂, 𝐴, 𝐵 et 𝐶 quatre points dans le plan tels que 𝑂𝐴 = 𝑂𝐵, construire le point 𝐷 image de 𝐶 par la rotation de
centre 𝑂 et qui transforme 𝐴 puis 𝐵.
Soient 𝐴, 𝐵, 𝐶 et 𝐷 quatre points dans le plan tels que 𝐴𝐶 = 𝐵𝐷 et (𝐴𝐵) ∦ (𝐶𝐷) ; Déterminer le centre de la rotation
qui transforme 𝐴 en 𝐵 et 𝐶 en 𝐷.
Propriété :
La rotation 𝑅
( Ω,𝜃
)
est une bijection et sa bijection réciproque est la bijection 𝑅
( Ω,−𝜃
)
Preuve :
(Ω,𝜃)
′
) ≡ 𝜃 [ 2 𝜋]
) ≡ −𝜃 [ 2 𝜋]
(Ω,−𝜃)
Propriété : (Propriété fondamentale de la rotation)
Soit 𝑅
(Ω,𝜃)
la rotation de centre Ω et d’angle 𝜃 si {
alors (𝑀𝑁
′
′ ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗
) ≡ 𝜃 [ 2 𝜋]
Preuve :
On a :
′
′ ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗
′
′ ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗
) [ 2 𝜋]
′ ⃗⃗⃗⃗⃗⃗⃗⃗
) [ 2 𝜋]
Car (𝑀𝑁
′
′ ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗
, Ω𝑀
′ ⃗⃗⃗⃗⃗⃗⃗⃗
) [ 2 𝜋] (la rotation conserve la mesure des angles orientés)
D’où : (𝑀𝑁
′
′ ⃗⃗⃗⃗⃗⃗⃗⃗⃗⃗
) ≡ 0 [ 2 𝜋].
C.R.P.T.A
1Bac SM F La rotation dans le plan
Soient 𝐼 𝑀
et 𝐽
𝑀
les milieux respectifs de [𝑀𝑀
1
] et [𝑀
1
𝑀′], on a :
1
1
𝑀
1
1
𝑀
𝑀
𝑀
Propriété :
La composition de deux symétries axiales 𝑆
( Δ
)
et 𝑆′
( Δ′
)
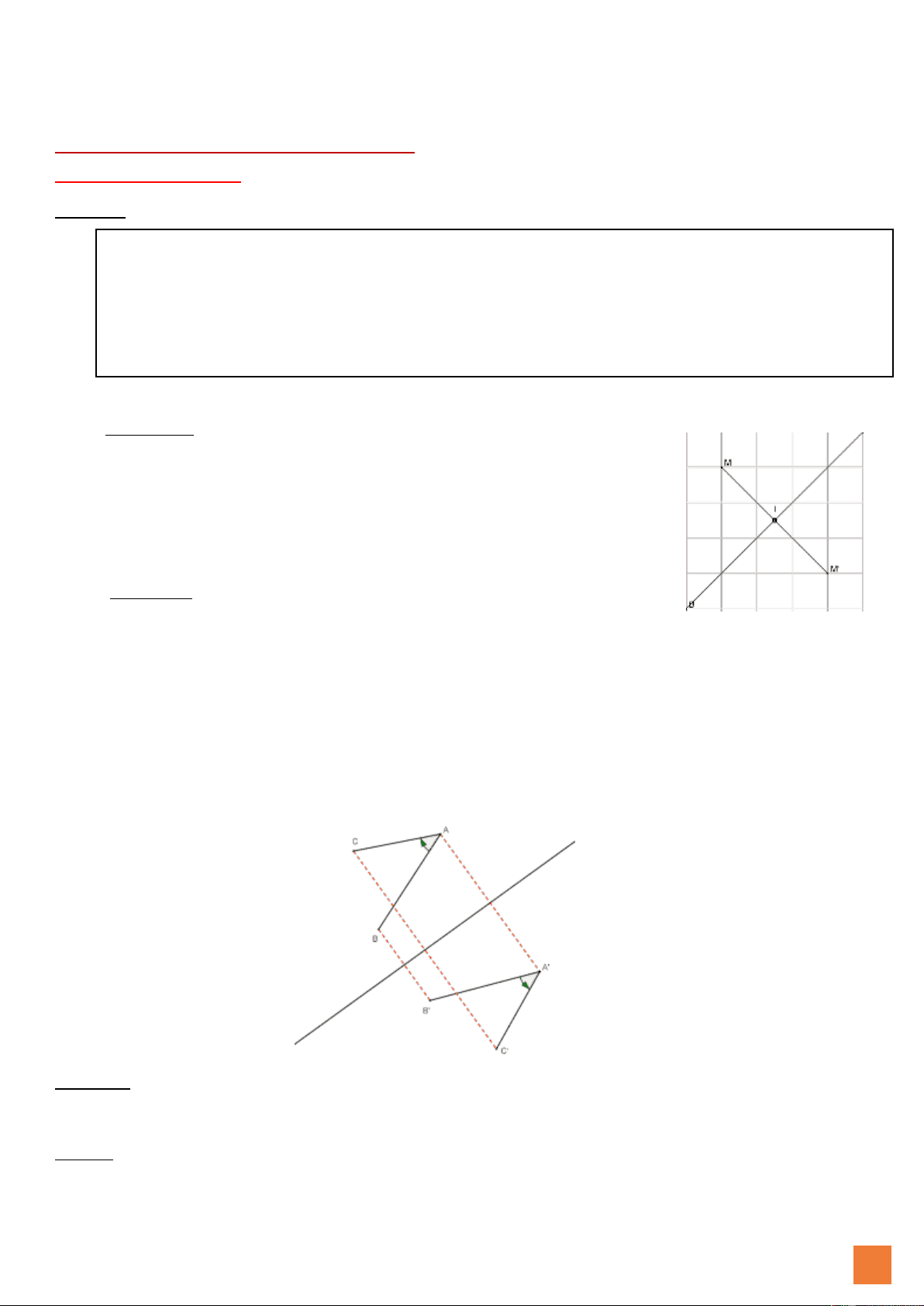
d’axes parallèles est la translation de vecteur 𝐴𝐵
où 𝐴 et
𝐵 les intersections respectives de (𝐷) et (Δ) et de (𝐷) et (Δ′) avec (𝐷) une droite perpendiculaire à (Δ)
si (Δ) ∥ (Δ
′
) alors : 𝑆′
(Δ′)
(Δ)
𝐴𝐵
⃗⃗⃗⃗⃗
2.2 Composition de deux rotations de centres différents.
Soient 𝑅 (𝑂,𝛼)
et 𝑅
(Ω,𝛽)
′
deux rotations dans le plan où Ω ≠ 𝑂 on
s’intéresse à la nature de la transformation 𝑅′𝑜𝑅
On sait que toute rotation peut être décomposée en composée
de deux symétries axiales.
Posons
On a : 𝑅 = 𝑆 (Δ)
(Δ
1
)
où (Δ
1
) est l’image de la droite (Δ) par la
rotation 𝑟 1
de centre 𝑂 et d’angle
−𝛼
2
D’autre part :
(Δ
2
)
(Δ)
où (Δ
2
) est l’image de la droite (Δ) par la
rotation 𝑟
2
de centre Ω et d’angle
𝛽
2
D’où :
′
(Δ
2
)
(Δ)
(Δ)
(Δ
1
)
(Δ
2
)
(Δ)
(Δ)
(Δ
1
)
(La composition est associative)
( Δ 2
)
( Δ 1
)
( Δ
)
( Δ
)
( 𝑃
)
La nature de 𝑅′𝑜𝑅 dépend de la position relative de (𝚫) et (𝚫
′
Si (Δ) et (Δ
′
) se coupent en 𝐽 (figure 1)
Dans ce cas 𝑅
′
( Δ 2
)
( Δ 1
)
est une rotation de centre 𝐽 et d’angle 2 (
modulo 2 𝜋 où 𝑢⃗ vecteur
directeur de (Δ
1
) et 𝑣 vecteur directeur de (Δ
2
Détermination de l’angle de la rotation : 2 𝛾
On a : −𝛾 −
−𝛼
2
𝛽
2
≡ 𝜋 [ 2 𝜋] (lire tous les angles dans le sens trigonométrique)
d’où : 𝛾 =
𝛼
2
𝛽
2
− 𝜋 [ 2 𝜋] (−𝜋 ≡ 𝜋[ 2 𝜋])
finalement : 2 𝛾 = 𝛼 + 𝛽 [ 2 𝜋] ( 2 𝜋 ≡ 0 [ 2 𝜋])
C.R.P.T.A
1Bac SM F La rotation dans le plan
Si (Δ) et (Δ
′
) sont parallèles (figure 2)
Dans ce cas 𝑅
′
(Δ
2
)
(Δ
1
)
est une translation.
Quand est ce que (Δ) et (Δ
′
) sont parallèles?
′
−𝛼
2
𝛽
2
[ 2 𝜋]
⟺ 𝛼 + 𝛽 ≡ 0 [ 2 𝜋]
Théorème :
Soient 𝑅
( 𝑂,𝛼
)
et 𝑅
(Ω,𝛽)
′
deux rotations dans le plan où Ω ≠ 𝑂
Si 𝜶 + 𝜷 ≠ 𝟐𝒌𝝅 alors 𝑅′𝑜𝑅 est une rotation d’angle 𝜶 + 𝜷
Si 𝜶 + 𝜷 = 𝟐𝒌𝝅 alors 𝑅′𝑜𝑅 est une translation dans le plan.
Remarque :
Pour déterminer les éléments de la rotation ou de la translation il est indispensable de maitriser toutes les étapes de la
démonstration.
Pr. BOUARI Souaad
C.R.P.T.A