



Mechanics
Physics 151
Lecture 8
Rigid Body Motion
(Chapter 4)








Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Mechanics, Physics, Rigid Body Motion, Rigid Body, 2-D Rotation, 3D Rotation, Constraints of Rotation , Orthogonal Matrix, Space Inversion, Rotation Matrix, Euler Angles, Euler’s Theorem, Rotation Vecto,r Infinitesimal Rotation, Axial Vecto,r Parity.
Typology: Study notes
1 / 23

This page cannot be seen from the preview
Don't miss anything!
Rigid Body Motion
(Chapter 4)
What We Did Last Time!^
Foundation for all experimental physics
!^
Differential cross section and impact parameter! Rutherford scattering
!^
Angular translation + Jacobian! Shape of
) changes
sin
s^
ds d
hits N
Rigid Body!^
Constraints:
!^
How many independent coordinates are there?! If you start from 3
and subtract the number of constraints
!^
const
for all ,
ij^
i^
j
r^
i j
r^
r
2
0 for N
Not all the constraints are independent
Today’s theme
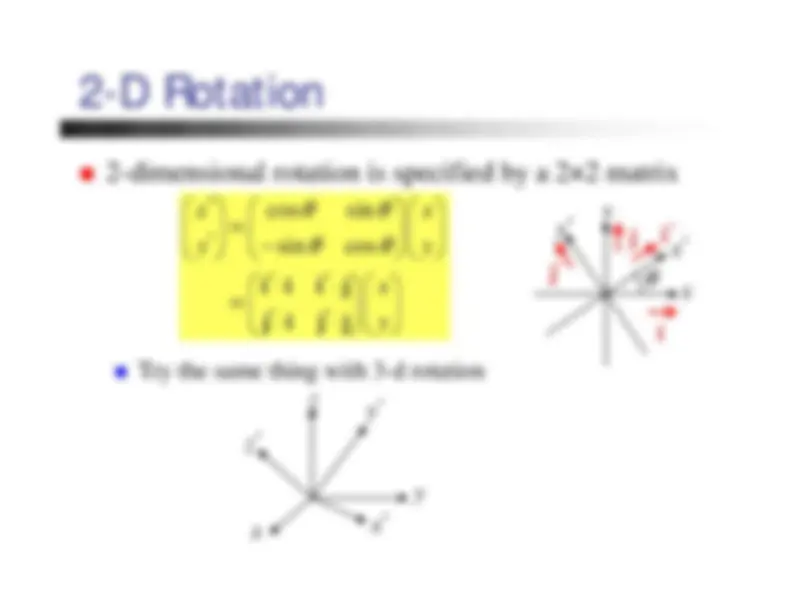
2-D Rotation!^
Try the same thing with 3-d rotation
cos
sin
sin
cos
x^
x
y^
y x y
i^
i^
i^
j
j^
i^
j^
j
′ x x
y ′ y
i
′ j
′ i j
x^
′ x
y ′ y
z
′ z
3D Rotation!^
Rotation is now expressed by
!^
ij^
!^
Only 3 are independent
1
2
3
x y z
x^
x^
x
1
2
3
x^
y^
z^
x^
x^
x
cos
i^
ij^
j^
ij^
j^
ij^
j
j^
j
x^
x^
a x
a x
∑
∑ Einstein convention:
Implicit summation over repeated index
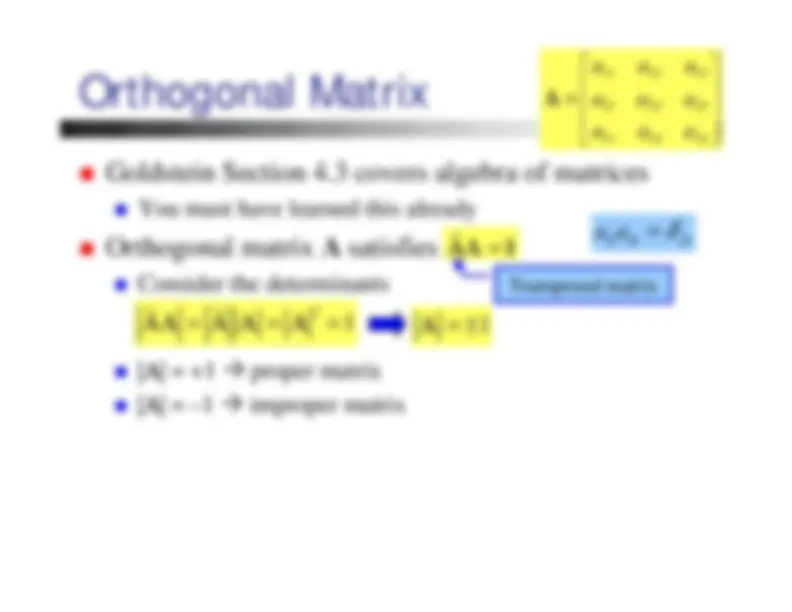
Constraints of Rotation!^
Exactly the constraints we need for rigid body motion! Using the transformation matrix! Matrix
aij
] is orthogonal
2
i^
i^
i^
i
r^
x x
′ ′ x x
i^
i^
ij^
j^
ik^
k
x x
a x a x ′ ′ =
i^
ij^
j
x^
a x ′ = therefore
ij^
ik^
jk
j^
k
a a
j^
k
6 conditionsreduces freeparametersfrom 9 to 3
Transpose of
A
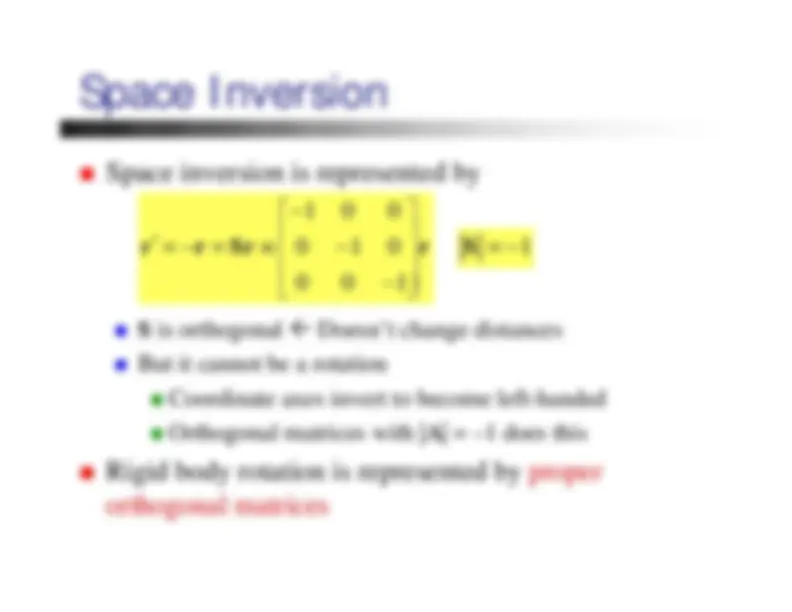
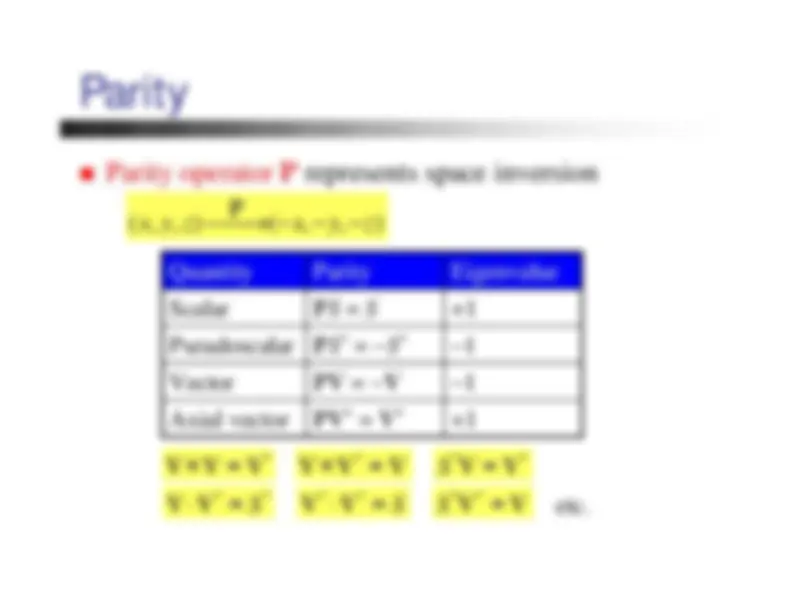
Space Inversion!^
is orthogonal
Doesn’t change distances
!^
But it cannot be a rotation^!
Coordinate axes invert to become left-handed! Orthogonal matrices with |
| = –1 does this
!^
r^
r^
Sr
r^
Rotation Matrix!^
!^
Rotating
r
around an axis by an angle
!^
Positive angle = clockwise rotation
!^
Rotating the coordinate axes around the same axis by thesame angle in the opposite direction^!
Positive angle = counter clockwise rotation
!^
We are more interested in the latter for now
!^
!^
There are many ways
′ = r
Ar
Euler Angles!^
cos May rotate around different axes in different order! Many conventions exist – Watch out!
sin
0
sin
cos
0
0
0
1
φ^
φ
φ^
φ
^
^
=^
−
^
^
D
1
0
0
0
cos
sin
0
sin
cos θ^
θ
θ^
θ
^
^
=^
^
^
− ^
C
cos
sin
0
sin
cos
0
0
0
1
ψ^
ψ
ψ^
ψ
^
^
=^
−
^
^
B
cos
cos
cos
sin
sin
cos
sin
cos
cos
sin
sin
sin
sin
cos
cos
sin
cos
sin
sin
cos
cos
cos
cos
sin
sin
sin
sin
cos
cos
ψ^
φ^
θ^
φ^
ψ
ψ^
φ^
θ^
φ^
ψ^
ψ^
θ
ψ^
φ^
θ^
φ^
ψ^
ψ^
φ^
θ^
φ^
ψ^
ψ^
θ
θ^
φ
θ^
φ
θ
−^
^
^
=^
−^
−^
−^
^
^
−
^
A
Rigid Body Motion!^
Define
x’-y’-z’
axes (body axes) attached to the rigid body
!^
Same direction as
x-y-z
(space axes) at
t^
!^
Origin fixed at one point of the rigid body (e.g. CoM)
!^
Use
( t ) to describe the motion of the origin
!^
Use
( t ) to describe the rotation of the
x’-y’-z’
axes
!^
Use Euler angles
t ),
t ),
( t )
!^
!^
,^ φ
,^ θ
,^ ψ
Euler’s Theorem
!^
If a matrix
satisfies
!^
Since !^
For odd-dimensioned matrices
Ar = r
1 r =
0 or
0 or
r^
Q.E.D.
Rotation Vector?!^
Direction of axis (2 parameters) and angle of rotation (1)! It sounds a bit like angular momentum
!^
Angular momentum is a vector
!^
Two angular momenta can be added in any order
!^
Rotation is not a vector^!
Two rotations add up differently depending on whichrotation is made first
behaves almost like a
vector
Infinitesimal Rotation!^
Using! We can write
ε as
ε^
ε^
ε^
ε^
1
ε^
ε (^1) − = A
ε^
ε
!
ε^
ε !^
ε^ is antisymmetric^3
2
3
1
2
1
d^
d
d^
d
d^
Ω d
ε^
1
2
3
d^
d^
d^
d
We’ll see…
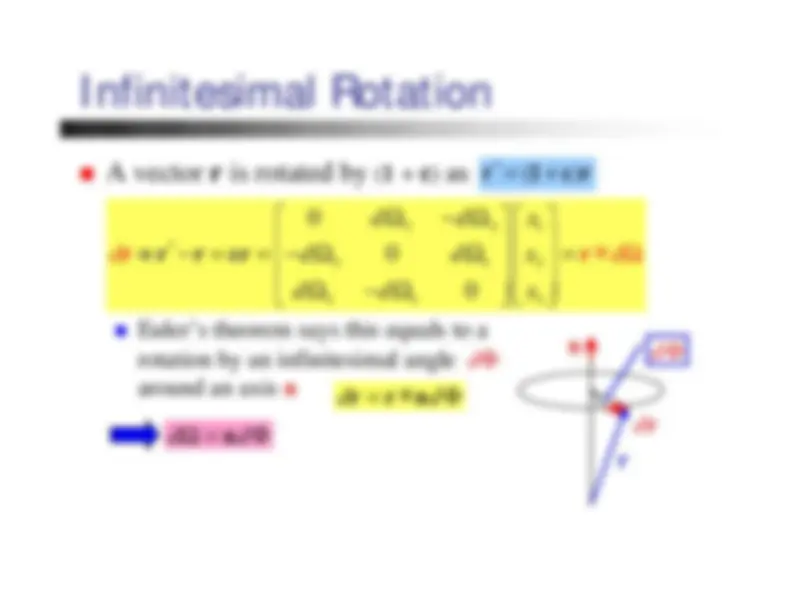
Infinitesimal Rotation!^
ε
!^
Euler’s theorem says this equals to arotation by an infinitesimal angle
d
around an axis
n
r^
ε^
r
3
2
1
3
1
2
2
1
3
d^
d^
x
d^
d^
x
d^
d^
x
d^
d
r^
r^
r^
ε^
r ◊
r^
n
r d r
d Φ
d^
d
=^
r^
r ◊n
d^
d =^
n