


Learning from Observations
Chapter 18, Sections 1–4
Chapter 18, Sections 1–4 1


















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An introduction to learning from observations, focusing on inductive learning and decision trees. Inductive learning is a method used to construct or adjust a hypothesis based on a given training set, aiming for consistency and simplicity. Decision trees are a representation for hypotheses, expressing any function of input attributes and allowing for efficient classification. The design of learning elements, hypothesis spaces, and the decision tree learning algorithm.
Typology: Study notes
1 / 30

This page cannot be seen from the preview
Don't miss anything!
Chapter 18, Sections 1–
Chapter 18, Sections 1–
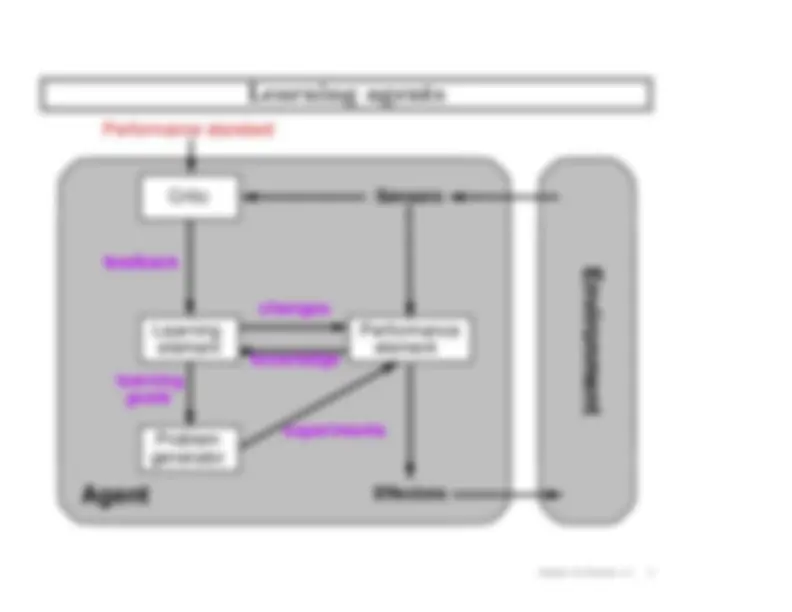
Learning agents
Inductive learning
Decision tree learning
(Next lecture covers neural networks)
Chapter 18, Sections 1–
Performance standard
Effectors Sensors
Performance
element
changes
knowledge
learning goals
Problem
generator
feedback
Learning element Critic
experiments
Chapter 18, Sections 1–
Design of learning element is dictated by
what type of performance element is used
which functional component is to be learned
how that functional compoent is represented
what kind of feedback is available
Example scenarios:
Simple reflex agent Logical agent Alpha−beta search Performance element
Transition model Transition model Eval. fn. Component
Neural net Dynamic Bayes net Successor−state axioms Weighted linear function Representation
Utility−based agent
Percept−action fn
Correct action Outcome Outcome Win/loss Feedback
Supervised learning
: correct answers for each instance
Reinforcement learning
: occasional rewards
Chapter 18, Sections 1–
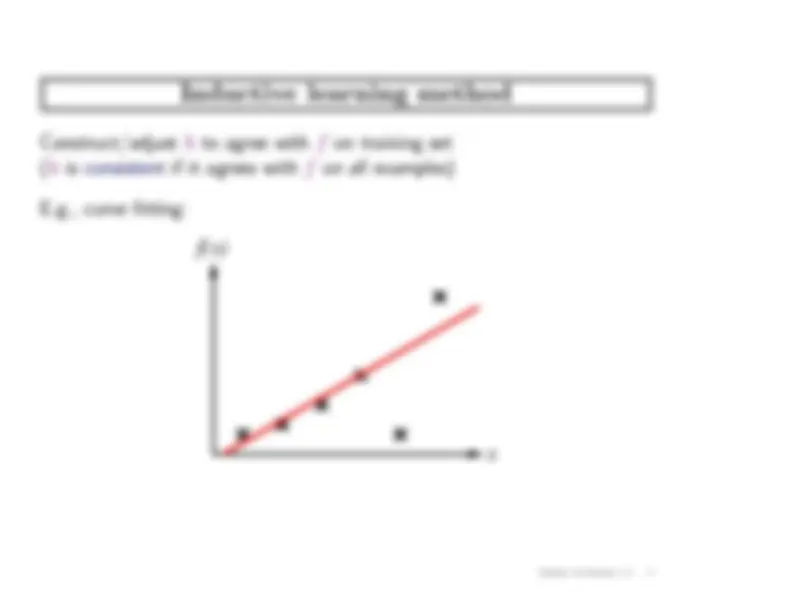
Construct/adjust
h
to agree with
f
on training set
h
is
consistent
if it agrees with
f
on all examples)
E.g., curve fitting:
Chapter 18, Sections 1–
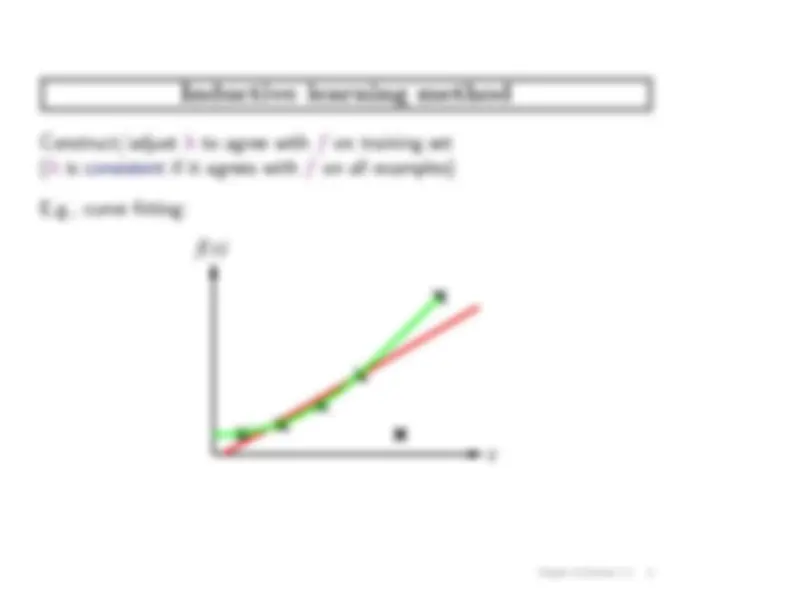
Construct/adjust
h
to agree with
f
on training set
h
is
consistent
if it agrees with
f
on all examples)
E.g., curve fitting:
Chapter 18, Sections 1–
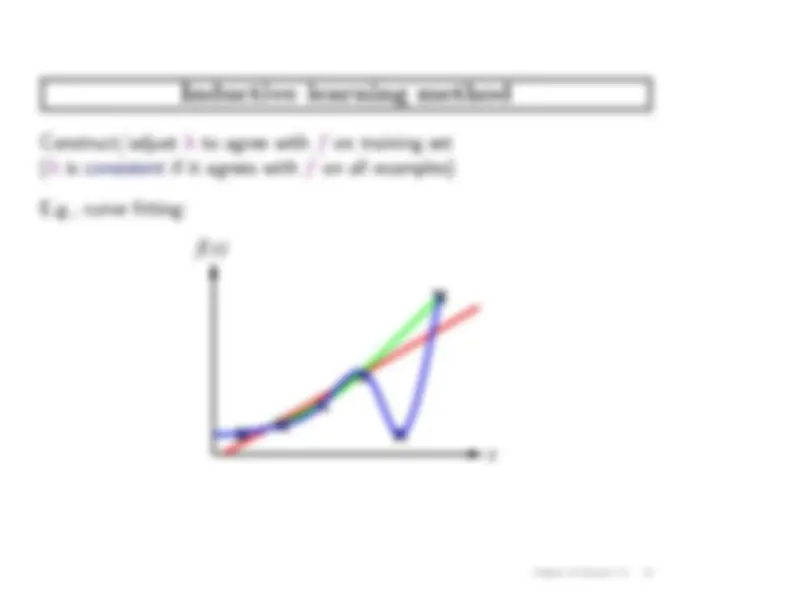
Construct/adjust
h
to agree with
f
on training set
h
is
consistent
if it agrees with
f
on all examples)
E.g., curve fitting:
Chapter 18, Sections 1–
Construct/adjust
h
to agree with
f
on training set
h
is
consistent
if it agrees with
f
on all examples)
E.g., curve fitting:
Chapter 18, Sections 1–
Examples described by
attribute values
(Boolean, discrete, continuous, etc.)
E.g., situations where I will/won’t wait for a table: Example
Attributes
Target
Alt
Bar
F ri
Hun
P at
P rice
Rain
Res
T ype
Est
WillWait
X 1 T F F T
Some
$$$
F
T
French
0–
T
X 2 T F F T
Full
$
F
F
Thai
30–
F
X 3 F T F F
Some
$
F
F
Burger
0–
T
X 4 T F T T
Full
$
F
F
Thai
10–
T
X 5 T F T F
Full
$$$
F
T
French
60
F
X 6 F T F T
Some
$$
T
T
Italian
0–
T
X 7 F T F F
None
$
T
F
Burger
0–
F
X 8 F F F T
Some
$$
T
T
Thai
0–
T
X 9 F T T F
Full
$
T
F
Burger
60
F
X
10
T
T
T
T
Full
$$$
F
T
Italian
10–
F
X
11
F
F
F
F
None
$
F
F
Thai
0–
F
X
12
T
T
T
T
Full
$
F
F
Burger
30–
T
Classification
of examples is
positive
(T) or
negative
Chapter 18, Sections 1–
E.g., here is the “true” tree for deciding whether to wait: One possible representation for hypotheses
No
Yes
No
Yes
No
Yes
No
Yes
No
Yes
No
Yes
None
Some
Full
>
30−
10−
0−
No
Yes
Alternate?
Hungry?
Reservation?
Bar?
Raining?
Alternate?
Patrons?
Fri/Sat?
WaitEstimate?
F
T
F
T
T
T
F
T
T
F
T
T
F
Chapter 18, Sections 1–
How many distinct decision trees with
n
Boolean attributes
Chapter 18, Sections 1–
How many distinct decision trees with
n
Boolean attributes
= number of Boolean functions
Chapter 18, Sections 1–
How many distinct decision trees with
n
Boolean attributes
= number of distinct truth tables with = number of Boolean functions
n
rows =
2 n
Chapter 18, Sections 1–
How many distinct decision trees with
n
Boolean attributes
= number of distinct truth tables with = number of Boolean functions
n
rows =
2 n
E.g., with 6 Boolean attributes, there are 18,446,744,073,709,551,616 trees
Chapter 18, Sections 1–