


Lecture 2
time, clocks, and synchronization
distributed systems
CS425 / ECE 428 / CSE 424








Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The importance of synchronizing clocks in distributed systems and explores various algorithms for achieving clock synchronization, including the berkeley algorithm and cristian's method. The document also introduces the network time protocol (ntp) and its theoretical basis.
Typology: Study notes
1 / 20

This page cannot be seen from the preview
Don't miss anything!
These slides are based on ideas and material from the following sources:
modified by Professors Indranil Gupta, Nitin Vaidya, and Yih-Chun Hu at University of Illinois
real time
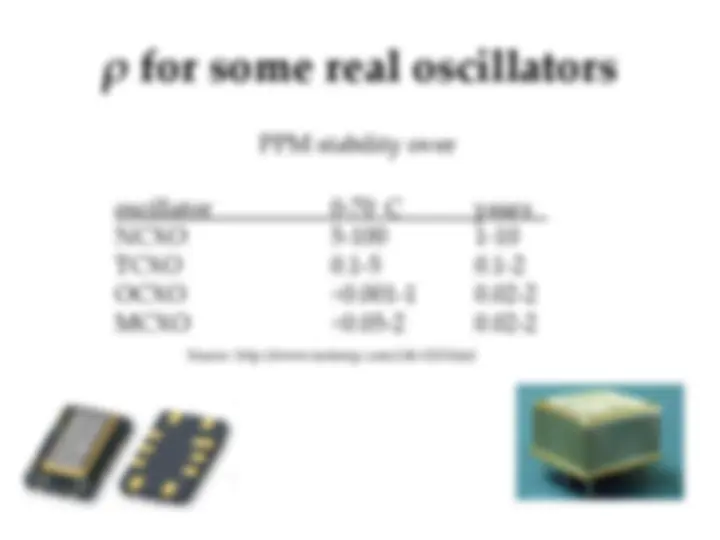
Source: http://www.isotemp.com/146-010.html
mr
mt pi Time server,S
RTT = t 1 – t 2
client sets its clock to T + RTT/
assumptions:
RTT measured accurately transmission and computation delays are symmetric server timestamped the message at the last possible instant before sending it back
t 1 t 2
Client pi
Server S
mr mt(T)
T
secondary servers, synched by the primary server
Primary server, direct synch.
Strata 3, synched by the secondary servers
provides UTC synchronization service across the internet
uses a network of time servers to synchronize all processes on a
network.
time servers are connected by a synchronization subnet tree
the root is adjusted directly
each node synchronizes its children nodes.
1
2 2 2
3 3 3 3 3 3
Ti
Ti-2 Ti-
Ti- 3
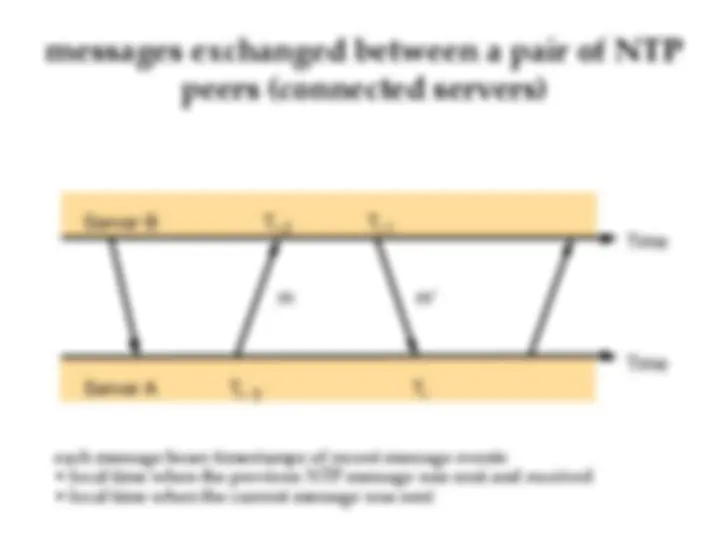
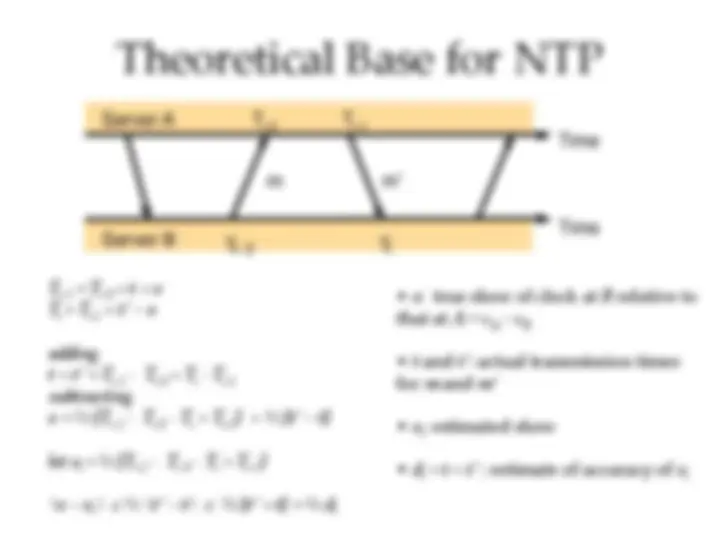
Server B
Server A
Time
m m'
Time
each message bears timestamps of recent message events
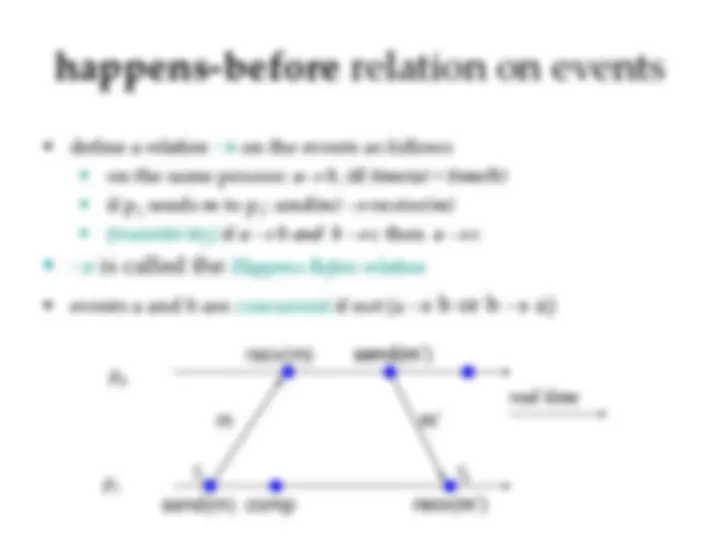
define a relation on the events as follows
on the same process: a b , iff time(a) < time(b) if p 1 sends m to p 2 : send(m) receive(m) (transitivity) if a b and b c then a c
t 1 t 2 p 1
p 2
m m’
send(m)
recv(m) send(m’)
comp recv(m’)
real time