


Lecture2
time,clocks,andsynchronization
distributedsystems
CS425/ECE428/CSE424














Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
The importance of synchronizing clocks in distributed systems, sources of time, and various algorithms for internal and external synchronization. It covers concepts such as skew, synchronization interval, real time, and logical clocks. Algorithms like the berkeley algorithm, cristian's method, and ntp are explained.
Typology: Study notes
1 / 30

This page cannot be seen from the preview
Don't miss anything!
These^ slides
are^ based
on^ ideas
and^ material
from^ the
following
sources:
-^ slides
prepared
by^ Professors
M.^ T.^ Harandi and
J.^ Hou and
subsequently
modified
by^ Professors
Indranil Gupta,
Nitin Vaidya,
and^ Yih
‐Chun^
Hu at
University
of^ Illinois
-^ slides
from^ Professor
S.^ Ghosh’s course
at^ University
of^ Iowa
-^ primary
standard
=^ rotation
of^ the
earth
-^ not^ a
stable
-^ de^ facto^ primary
standard
=^ International
Atomic
Time^
-^1 atomic
second
=^ 9,192,631,
orbital
transitions
(^133) of Cs
-^86400
atomic
seconds
=^1 solar
day^ – 3ms
-^ Coordinated
Universal
Time^
=^ international
standard
-^ derived
from^ TAI
by^ adding
leap^ seconds
to^ keep
it^ close
to^ solar
time
-^ UTC
source
signals
are^ synchronized
-^ UTC
time^ is
re‐transmitted
by^ GPS
satellites
(0.1‐^10
mS)
Source:^ http://www.isotemp.com/
‐010.html
-^ a^ distributed
system
consists
of^ N^ processes
p^ ,^ p^ ,^1
…,^ p^ N
-^ process
-^ state:
values
of^ local
variables
including
time
-^ c^ (t):^ i^ the^ reading
of^ the^ software
clock^ at
process
i^ when^
the^ real^
time^ is^ t
.
-^ actions:
send,^ receive,
compute
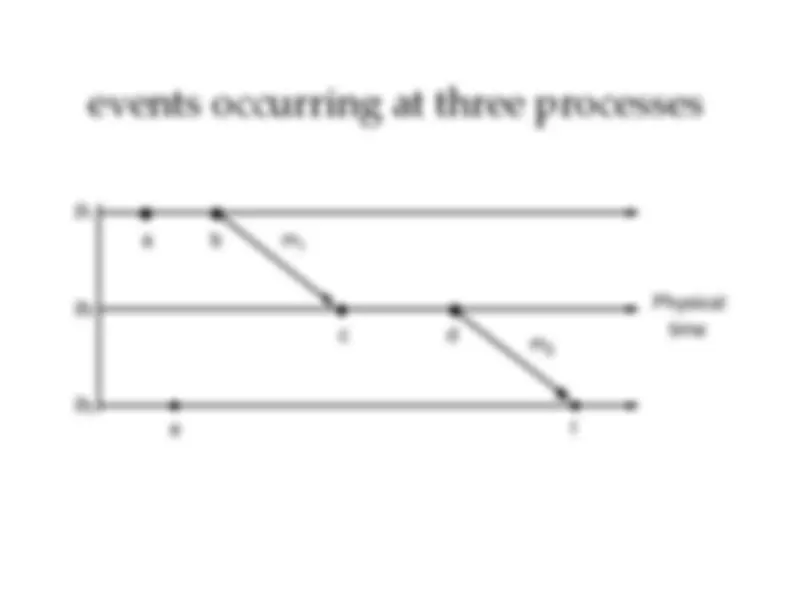
-^ occurrence
of^ an^
action^
is^ called
an^ event t^1
t^2
m^
m’
send(m)
send(m’) recv(m)
recv(m’)
p^2 p^1
comp
real^ time
^ uses
an^ elected
leader^
process
to^ ensure
that^ maximum
skew^
is^ δ
^ leader
broadcasts
to^ all^ machines
for^ their
time
^ adjusts
times^
received
for^ transmission
delay &^ latency
^ averages
times^
after^ removing
outliers
^ tells
each^ machine
how^ to
adjust.
^ in^ some
systems
multiple
time^ servers
are^ used
^ avg.
time^ is
more^
accurate,
but^ still
drifts
^ failure
of^ the
leader
requires
some^
time^ for
re‐election,
so^ accuracy
cannot internal^ be^ guaranteed
synchronization:
Berkeley
algorithm
mr mt
pi^
Time server,S
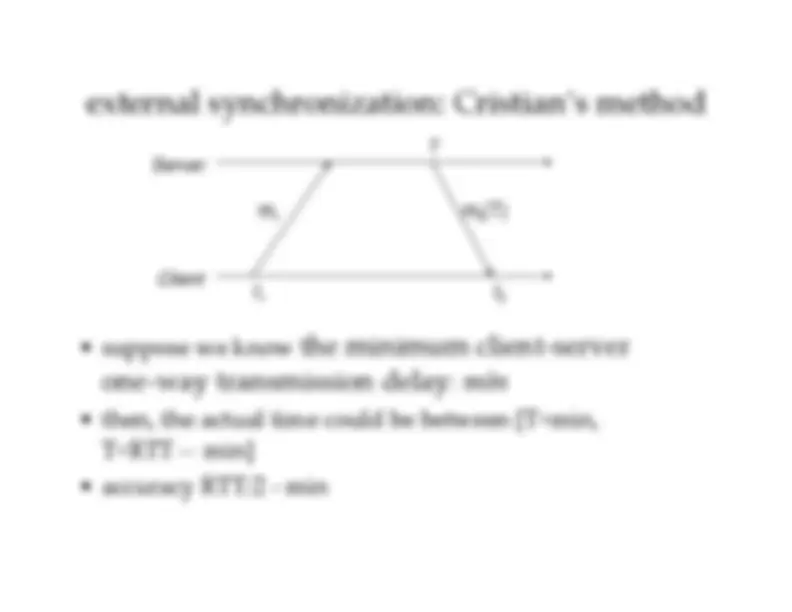
the^ minimum
client
‐server
one‐ way^
transmission
delay:
min
t^1
t^2
Server^ Client
mr^
T m(T)t
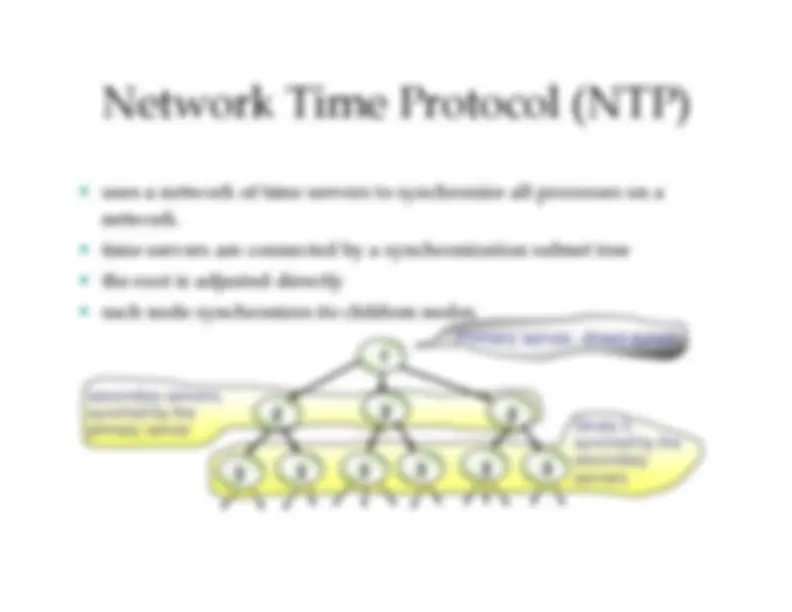
secondary servers,synched by theprimary server
Primary server, direct synch.
Strata 3,synched by thesecondaryservers
^ uses
a^ network
of^ time
servers
to^ synchronize
all^ processes
on^ a
network. time^ servers
are^ connected
by^ a^ synchronization
subnet
tree
^ the^
root^ is
adjusted
directly
^ each
node^ synchronizes
its^ children
nodes. 1 2
2
2
3
3
3
3
3
3
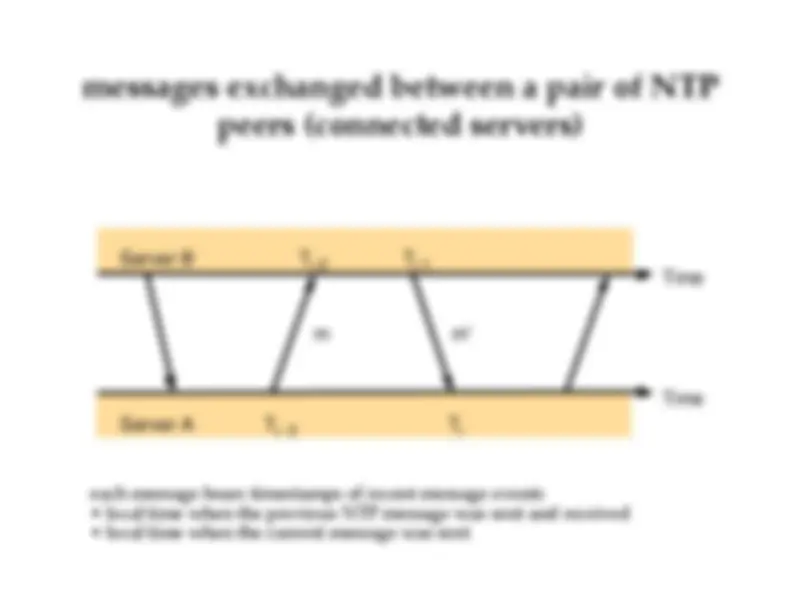
T^ i-1 Ti T^ i-2 Ti- 3 Server B Server A
m^
m'
Time Time
-^ o :^ true
skew^ of
clock^ at
B^ relative
to
that^ at^
A^ =^ c– cA^
B
-^ t^ and
t’:^ actual
transmission
times
for^ m^ and
m’
-^ o :^ estimated i
skew
-^ d^ =^ t^ i^
+^ t’^ :^ estimate
of^ accuracy
of^ oi
T=^ Ti‐^2
+^ t^ +^ i‐ 3 o T=^ Ti^ i‐^1
+^ t’^ – o addingt^ +^ t’^ =^ T
‐^ Ti‐ 2 i‐^3 +^ T‐^ T i^ i‐^1
subtractingo^ =^ ½^ [T
‐^ Ti‐ 2 i‐^3 ‐^ T+^ T i^
]^ +^ ½i‐ 1 [t’^ – t]
let^ o=^ ½i^
[T‐^ i‐^2
T‐^ T^ i‐^3 i^
+^ T]i‐^1
|o^ – o|i^
§^ ½^ |t’
- t|^ §^
½^ [t’^ +^ t]^ =^ ½^ d
i
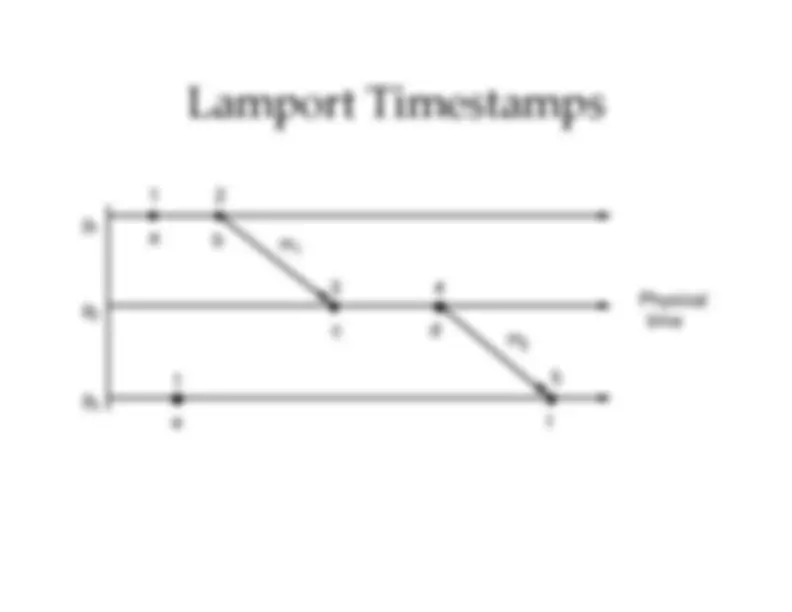
^ define
a^ relation
the^ events as
follows
^ on^
the^ same
process:
iff^ time(a)
<^ time(b)
^ if^ p
sends 1 m^ to^ p
:^ send(m) 2
^ (transitivity)
b^ and^
‐Before
relation
^ events
a^ and b^ are^ concurrent if
not^ (a
t^1
t^2
m^
m’
send(m)
send(m’) recv(m)
recv(m’)
p^2 p^1
comp
real^ time