Download Solving Forces & Displacements in Indeterminate Structures using Flexibility & Stiffness and more Summaries Engineering in PDF only on Docsity!
P4 Stress and Strain
Dr. A.B. Zavatsky
MT
Lecture 3
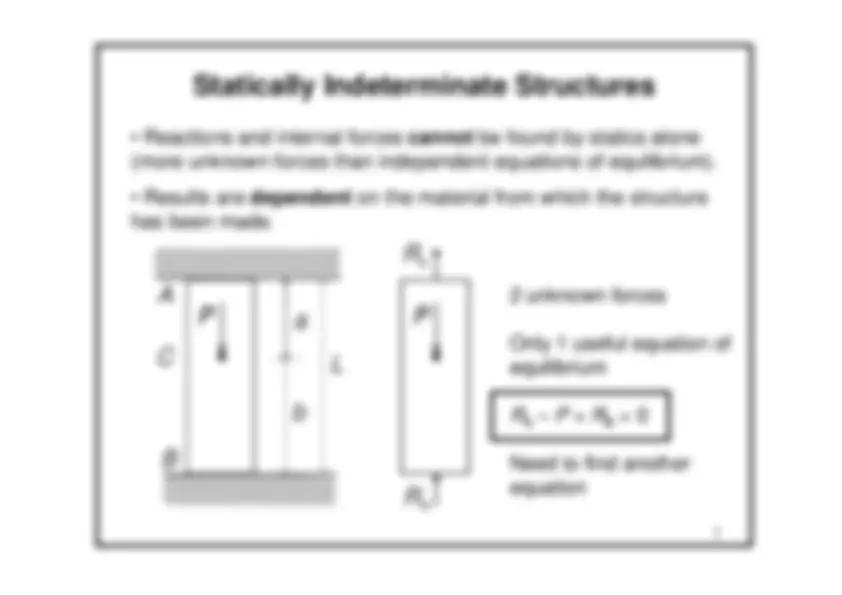
Statically Indeterminate Structures
Statically determinate structures.Statically indeterminate structures (equations of
equilibrium, compatibility, and force-displacement;use of displacement diagrams)
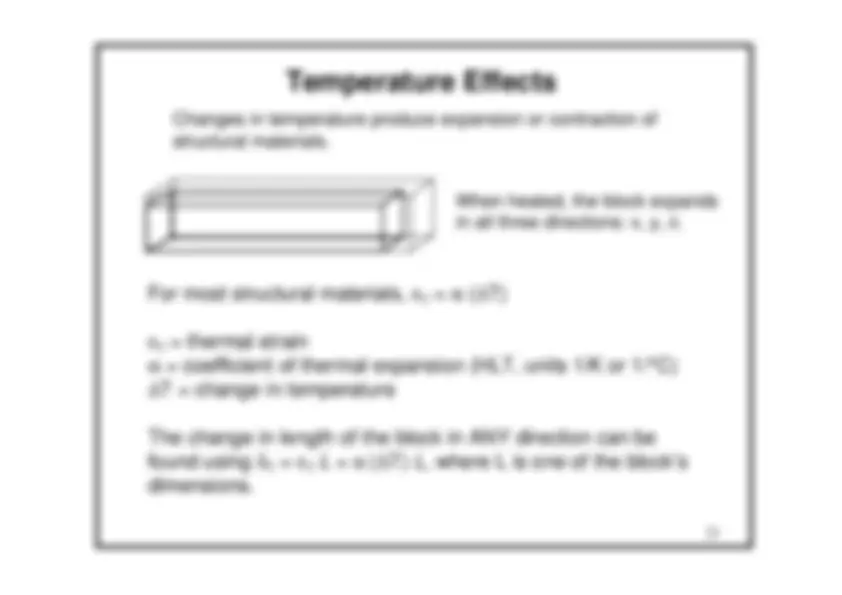
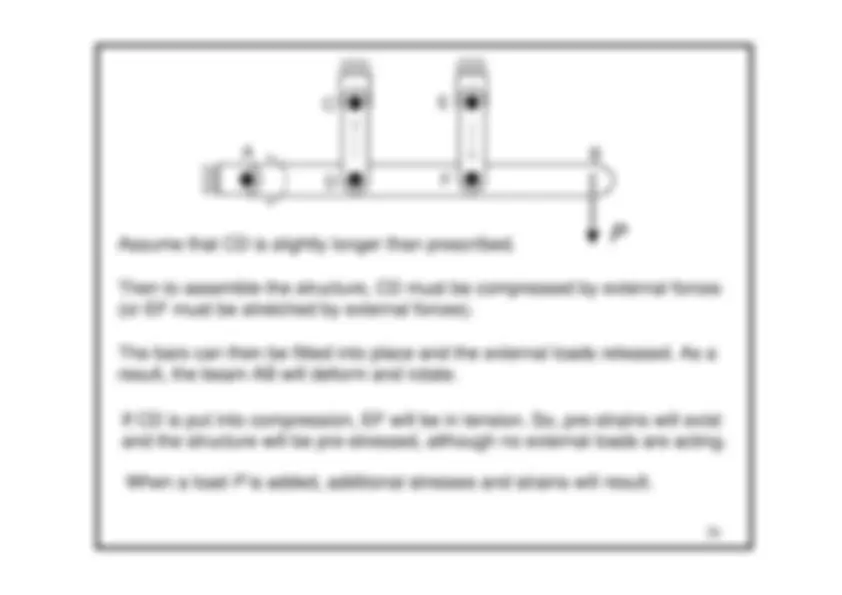
Bolts and turnbuckles.Temperature effects.Misfits and pre-strains.
Statically Determinate Structures
- Reactions and internal forces
can
be determined solely from
free-body diagrams and equations of equilibrium.• Results are
independent
of the material from which the structure
has been made.
10 kN
5 kN
Unknowns = reaction forces + bar forces= (2 + 1) + 13 = 16 Independent equations [equilibrium in x & y directionsat each joint]= 2 (number of joints)= 2 (8) = 16 Double-check structure forinternal mechanisms, etc.
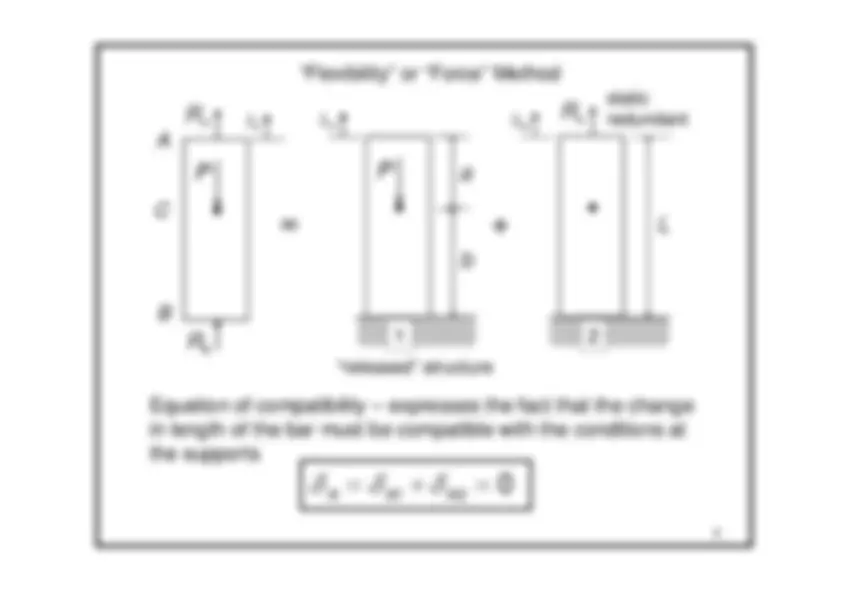
“Flexibility” or “Force” Method
=
A
C
B
PP
R
A
R
B
δ
A
PP
a
b
δ
A
R
A
L
δ
A
Equation of compatibility – expresses the fact that the changein length of the bar must be compatible with the conditions atthe supports
0
2
1
=
=
A
A
A
δ
δ
δ
staticredundant
“released” structure
Write the force-displacement relations. These take the mechanicalproperties of the material into account.
and
2
1
EA
L
R
EA
Pb
A
A
A
δ
δ
L
Pb
R
EA
L
R
EA
Pb
A
A
A
δ Substituting into the equation of compatibility gives:
L
Pa
R
P
R
A
B
Substituting into the equilibrium equation gives:
*Note that we have solved for forces.Hence, this approach is also called the“force” method. *Note that flexibilities (
b
/
EA
) and (
L
/
EA
)
appear in this equation. Hence, thisapproach is called the “flexibility” method.
Write the force-displacement relations and solve for the forces.
b
EA
R
a
EA
R
EA
b
R
EA
a
R
C
B
C
A
B
C
A
C
2
1
2
1
and
and
Substituting into the equilibrium equation gives:
P
b
EA
a
EA
C
C
2
1
δ
δ
*Note that stiffnesses (EA/a) and (EA/b)appear in this equation. Hence, thisapproach is called the “stiffness” method.
Using the compatibility condition (displacements equal) gives:
(
)
EAL
Pab
b
a
EA
Pab
C
*Note that we have solved for displacement.Hence, this approach is also called the“displacement” method.
Finally, substituting into the expressions for forces gives:
L
Pa
b
AE
EAL
Pab
R
L
Pb
a
AE
EAL
Pab
R
B A
So, both the flexibility method and the stiffness method give thesame result.The choice of approach will depend on the problem being solved.
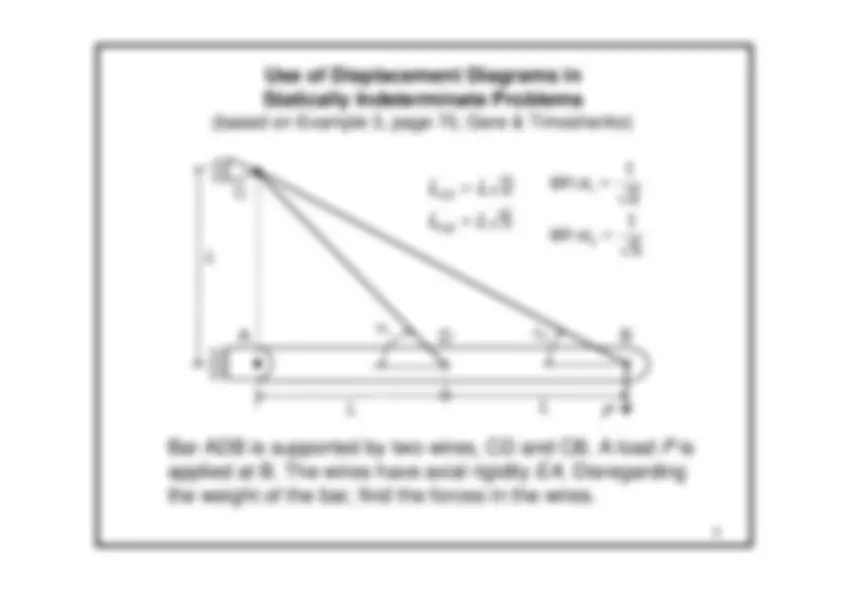
EquilibriumHorizontal DirectionVertical DirectionMoments about A (ccw +)
4 unknown forces, only 3 equations
R
Ay
T
CD
T
CB
P
R
Ax
L
L α
2
α
1
0
cos
cos
2
1
=
−
−
=
CB
CD
Ax
x
T
T
R
F
0
sin
sin
2
1
=
−
=
P
T
T
R
F
CB
CD
Ay
y
α
α
(
)
(
)
(
)
sin
sin
2
1
L P L T L T M
CB
CD
A
α
α
CompatibilityWe can relate the tensions in the two wires by considering theextensions of the wires.
δ
D
δ
B
L
L
D
B
δ
δ
2
=
2
1 2
sin
2
sin
sin
D
B
CB
D
CD
=
= =
δ
CD
δ
D
δ
B
δ
CB
Displacement diagram
13
Elasto-plastic Analysis of a Statically Indeterminate Structure
(based on Example 2-19 from Gere)
A
Bar 1
B
P
L
b
b
b
Bar 2
(a)
Find the yield load
P
Y
and the corresponding yield displacement
Δ
BY
at point
B.
(b)
Find the plastic load
P
P
and the corresponding plastic displacement
Δ
BP
at
point B.
(c)
Draw a load-displacement diagram relating the load
P
to the displacement
Δ
B
of point B.
Horizontal beam AB is rigid. Supporting bars 1 and 2 are made of anelastic perfectly plastic material with yield stress
σ
Y
, yield strain
ε
Y
, and
Young’s modulus E =
σ
Y
/
ε
Y
. Each bar has cross-sectional area
A
.
F
1
P
b
b
b
F
2
R
Ax
R
Ay
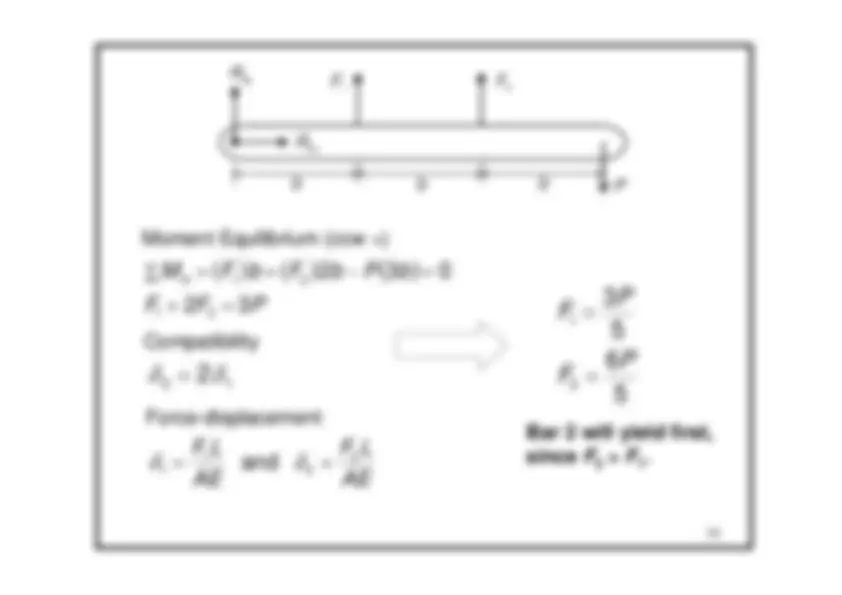
Moment Equilibrium (ccw +)
(
)
(
)
(
)
2
1
2
1
P
F
F
b P b F b F M
A
Compatibility
1
2
δ
δ
Force-displacement
AE
L
F
AE
L
F
2
2
1
1
and
δ
δ
2 1
P
F
P
F
Bar 2 will yield first,since
F
2
F
1
The corresponding elongation of bar 1 (which has just reachedyield) is:
E
L
E
L
A
F
AE
L
F
Y
σ
δ
1
1
1
Note that
P
P
P
Y
and
BP
BY
The downward displacement of the bar at point B is:
E
L
Y
BP
3
3
1
=
=
Δ
(b)
P
B
P
Y
P
P
BY
BP
(c)
Bar 2 yields
Bar 1 yields
Bar 2 plastic, bar 1 elastic
Both bars plastic
Bolts and Turnbuckles
Nut and BoltDistance
δ
travelled by the nut =
n p
n
= number of turns (not necessarily an integer)
p
= pitch of the screw (units mm / turn)
Turnbuckle Distance
δ
travelled = 2
n p
Often used to tension cables
Right-hand
screw
Left-hand
screw
The simplest way to produce a change in length.
L
δ
1
δ
1
δ
2
δ
3
P
s
P
s
P
c
The tensile forces in the cables
P
s
and the compressive force in the
tube
P
c
must be such that the final lengths of the cables and tube is the
same.
If the turnbuckles are rotated through
n
turns, the cables will shorten by a
distance
δ
1
= 2
n p
.
Equilibrium (forces must balance)
c
s
P
P
Compatibility (shortening of tube must equal shortening of cable)
2
1
3
δ
δ
δ
−
=
Force-displacement
c
c
c
s
s
s
A
E
L
P
A
E
L
P
np
2 3 1
δ δ δ
With these equations, we can solve for the forces in the tube andcables and for the shortening of the tube.