


Systems Analysis and Control
Matthew M. Peet
Arizona State University
Lecture 6: Calculating the Transfer Function






Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
In this lecture, Matthew M. Peet from Arizona State University introduces the concept of transfer functions in systems analysis and control. The lecture covers the representation of a system in transfer function form, the calculation of transfer functions from state-space models, and direct methods for finding transfer functions. The lecture also covers block diagram algebra, including modeling in the frequency domain and reducing block diagrams.
Typology: Lecture notes
1 / 23

This page cannot be seen from the preview
Don't miss anything!
Matthew M. Peet
Arizona State University
Lecture 6: Calculating the Transfer Function
In this Lecture, you will learn: Transfer Functions
Block Diagram Algebra
Example: Simple System
State-Space:
x˙(t) = −x(t) + u(t)
y(t) = x(t) −. 5 u(t) x(0) = 0
Apply the Laplace transform to the first equation:
x ˙(t) = −x(t) + u(t)
which gives sˆx(s) = −xˆ(s) + ˆu(s).
Solving for xˆ(s), we get
(s + 1)ˆx(s) = ˆu(s) and so xˆ(s) =
s + 1
ˆu(s).
Similarly, the second equation yields:
y ˆ(s) = ˆx(s) − .5ˆu(s) =
s + 1
uˆ(s) − .5ˆu(s) =
1 − .5(s + 1)
s + 1
uˆ(s) =
s − 1
s + 1
uˆ(s)
Thus we have the Transfer Function:
G(s) =
s − 1
s + 1
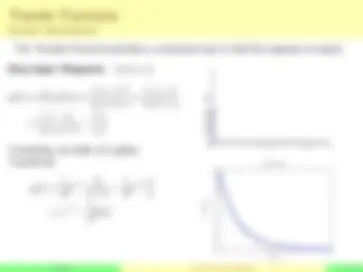
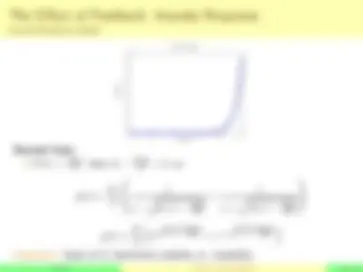
Example: Step Response
The Transfer Function provides a convenient way to find the response to inputs.
Step Input Response: uˆ(s) =
1
s
y ˆ(s) =
G(s)ˆu(s) =
s − 1
s + 1
s
s − 1
s
2
s + 1
s
Consulting our table of Laplace
Transforms,
y(t) =
− 1
s + 1
− 1
s
= e
−t
−
1 (t)
0 1 2 3 4 5 6
−0.
−0.
−0.
−0.
−0.
0
Step Response
Time (sec)
Amplitude
Return to the pendulum.
Dynamics:
θ(t) =
M gl
θ(t) +
T (t)
y(t) = θ(t)
For the first equation,
s
2 ˆ θ(s) =
M gl
θ(s) +
T (s)
Solve for
θ(s):
θ(s) =
s
2 −
M gl
2 J
T (s)
Second Equation: yˆ(s) =
θ(s)
Transfer Function:
G(s) =
ˆy(s)
T (s)
s
2 −
M gl
2 J
Impulse Input: uˆ(s) = 1
yˆ(s) =
G(s)ˆu(s) =
s
2 −
M gl
2 J
(s −
M gl
2 J
)(s +
M gl
2 J
M gl
s −
M gl
2 J
s +
M gl
2 J
0 5 10 15
0
2
4
6
8
10
12
14
16
18
x 10
5 Impulse Response
Time (sec)
Amplitude
Figure: Impulse Response with
g = l = J = 1, M = 2
In time-domain:
y(t) =
M gl
e
M gl
2 J
t
− e
−
M gl
2 J
t
Pendulum Accelerates to infinity!
x 1
x 2
m c
m w
u
Apply the Laplace Transform to the dynamics:
s
2
zˆ 1 (s) = −
1
m c
z ˆ 1 (s) −
c
m c
sˆz 1 (s) +
1
m c
ˆz 2 (s) +
c
m c
szˆ 2 (s)
s
2
zˆ 2 (s) =
1
m w
ˆz 1 (s) +
c
m w
sˆz 1 (s) −
1
m w
2
m w
z ˆ 2 (s) −
c
m w
szˆ 2 (s) −
2
m w
u ˆ(s)
yˆ(s) = ˆz 2 (s)
We isolate the z 1
and z 2
terms:
s
2
c
m c
s +
1
m c
ˆz 1
(s) =
1
m c
c
m c
s
z ˆ 2
(s)
s
2
c
m w
s +
1
m w
2
m w
ˆz 2
(s) =
1
m w
c
m w
s
z ˆ 1
(s) −
2
m w
u ˆ(s)
ˆy(s) = ˆz 2 (s)
Which yields
ˆz 1 (s) =
K 1
m c
c
m c
s
s
2
c
m c
s +
K 1
m c
zˆ 2 (s)
zˆ 2 (s) =
K 1
m w
c
m w
s
s
2
c
m w
s +
K 1
m w
K 2
m w
z ˆ 1 (s) −
K 2
m w
s
2
c
m w
s +
K 1
m w
K 2
m w
ˆu(s)
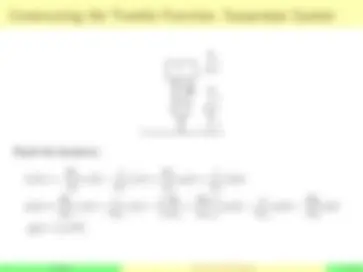
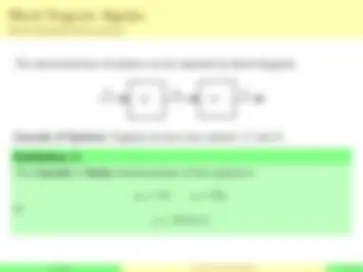
Series (Cascade) Interconnection
The interconnection of systems can be represent by block diagrams.
u y y 1
Cascade of Systems: Suppose we have two systems: G and H.
The Cascade or Series interconnection of two systems is
y 1
= Gu y = Hy 1
or
y = H(G(u))
Series Connection (Cascade)
G(s) H(s)
u(s) y y(s) 1
(s)
Series Interconnection:
G(s) and
H(s) be the transfer functions for G and H.
ˆy 1
(s) =
1
(s)ˆu(s) ˆy(s) =
H(s)ˆy 1
(s) =
H(s)
G(s)ˆu(s)
T (s) for the combination of G and H is
T (s) =
H(s)
G(s)
Note: The order of the
G and
Parallel Connection
G(s)
H(s)
u(s) y(s)
y 1
(s)
The Transfer function of a Parallel interconnection:
y ˆ(s) = ˆy 1
(s) + ˆy 2
(s) =
G(s)ˆu(s) +
H(s)ˆu(s) =
H(s) +
G(s)
ˆu(s)
T (s) for the parallel interconnection of G and H is
T (s) =
H(s) +
G(s)
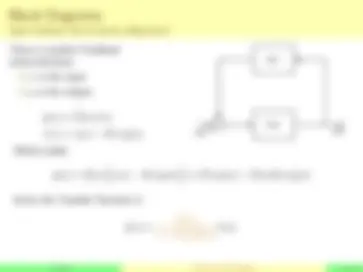
Lower Feedback Interconnection
Feedback:
In the Frequency Domain:
z ˆ(s) = −
K(s)ˆy(s) +
K(s)ˆu(s) yˆ(s) =
G(s)ˆz(s)
so
ˆy(s) =
G(s)ˆz(s) = −
G(s)
K(s)ˆy(s) +
G(s)
K(s)ˆu(s)
Solving for yˆ(s),
y ˆ(s) =
G(s)
K(s)
G(s)
K(s)
ˆu(s)
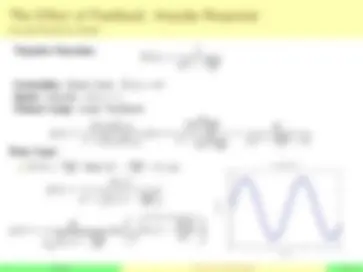
Inverted Pendulum Model
Transfer Function ˆ G(s) =
Js
2 −
M gl
2
Controller: Static Gain:
K(s) = K
Input: Impulse: ˆu(s) = 1.
Closed Loop: Lower Feedback
y ˆ(s) =
G(s)
K(s)
G(s)
K(s)
ˆu(s) =
K
Js
2 −
M gl
2
K
Js
2 −
M gl
2
Js
2 −
M gl
2
First Case:
M gl
2
, then K −
M gl
2
0 , so
ˆy(s) =
s
2
M gl
2 J
y(t) =
M gl
2 J
sin
M gl
t
0 2 4 6 8 10 12
−2.
−
−1.
−
−0.
0
1
2
Impulse Response
Time (sec)
Amplitude
Inverted Pendulum Model
0 5 10 15 20 25
0
2
4
6
8
10
12
14
16
18
x 10
6 Impulse Response
Time (sec)
Amplitude
Second Case:
M gl
2
, then K −
M gl
2
< 0 , so
ˆy(s) =
s −
M gl
2 J
s +
M gl
2 J
y(t) =
e
K/J−
M gl
2 J
t
−
K/J−
M gl
2 J
t
Important: Value of K determines stability vs. instability