


Lecture Note
On
Microprocessor and Microcontroller
Theory and Applications
Subject Code:BEE-1501
Semester: 5th
Branch: EE and EEE























































































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
A microprocessor is a programmable electronics chip that has computing and decision making capabilities similar to central processing unit of a computer. Any ...
Typology: Study notes
1 / 114

This page cannot be seen from the preview
Don't miss anything!
A microprocessor is a programmable electronics chip that has computing and decision making capabilities similar to central processing unit of a computer. Any microprocessor- based systems having limited number of resources are called microcomputers. Nowadays, microprocessor can be seen in almost all types of electronics devices like mobile phones, printers, washing machines etc. Microprocessors are also used in advanced applications like radars, satellites and flights. Due to the rapid advancements in electronic industry and large scale integration of devices results in a significant cost reduction and increase application of microprocessors and their derivatives.
Fig.1 Microprocessor-based system
Bit : A bit is a single binary digit. Word : A word refers to the basic data size or bit size that can be processed by the arithmetic and logic unit of the processor. A 16-bit binary number is called a word in a 16-bit processor. Bus : A bus is a group of wires/lines that carry similar information. System Bus : The system bus is a group of wires/lines used for communication between the microprocessor and peripherals. Memory Word : The number of bits that can be stored in a register or memory element is called a memory word. Address Bus : It carries the address, which is a unique binary pattern used to identify a memory location or an I/O port. For example, an eight bit address bus has eight lines and thus it can address 28 = 256 different locations. The locations in hexadecimal format can be written as 00H – FFH. Data Bus : The data bus is used to transfer data between memory and processor or between I/O device and processor. For example, an 8-bit processor will generally have an 8-bit data bus and a 16-bit processor will have 16-bit data bus. Control Bus : The control bus carry control signals, which consists of signals for selection of memory or I/O device from the given address, direction of data transfer and synchronization of data transfer in case of slow devices.
A typical microprocessor consists of arithmetic and logic unit (ALU) in association with control unit to process the instruction execution. Almost all the microprocessors are based on the principle of store-program concept. In store-program concept , programs or instructions are sequentially stored in the memory locations that are to be executed. To do any task using a microprocessor, it is to be programmed by the user. So the programmer must have idea about its internal resources, features and supported instructions. Each microprocessor has a set of instructions, a list which is provided by the microprocessor manufacturer. The instruction set of a microprocessor is provided in two forms: binary machine code and mnemonics.
Microprocessor communicates and operates in binary numbers 0 and 1. The set of instructions in the form of binary patterns is called a machine language and it is difficult for us to understand. Therefore, the binary patterns are given abbreviated names, called mnemonics, which forms the assembly language. The conversion of assembly-level language into binary machine-level language is done by using an application called assembler.
Technology Used:
The semiconductor manufacturing technologies used for chips are:
Transistor-Transistor Logic (TTL) Emitter Coupled Logic (ECL) Complementary Metal-Oxide Semiconductor (CMOS)
Classification of Microprocessors:
Based on their specification, application and architecture microprocessors are classified.
Based on size of data bus:
4-bit microprocessor 8-bit microprocessor 16-bit microprocessor 32-bit microprocessor
Based on application:
General-purpose microprocessor- used in general computer system and can be used by programmer for any application. Examples, 8085 to Intel Pentium. Microcontroller- microprocessor with built-in memory and ports and can be programmed for any generic control application. Example, 8051. Special-purpose processors- designed to handle special functions required for an application. Examples, digital signal processors and application-specific integrated circuit (ASIC) chips.
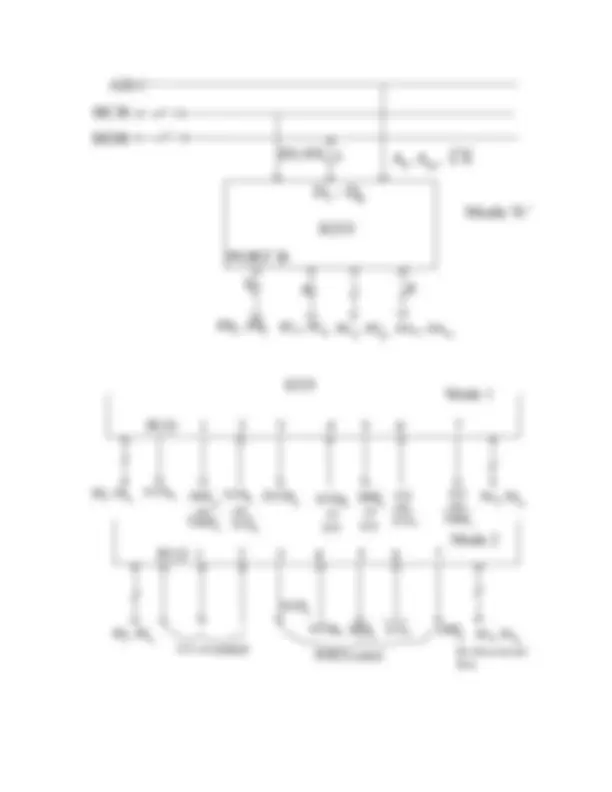
16-bit operations. The programmer can use these registers to store or copy data into the register by using data copy instructions.
Fig. 3 Register organisation
Accumulator
The accumulator is an 8-bit register that is a part of ALU. This register is used to store 8-bit data and to perform arithmetic and logical operations. The result of an operation is stored in the accumulator. The accumulator is also identified as register A.
Flag register
The ALU includes five flip-flops, which are set or reset after an operation according to data condition of the result in the accumulator and other registers. They are called Zero (Z), Carry (CY), Sign (S), Parity (P) and Auxiliary Carry (AC) flags. Their bit positions in the flag register are shown in Fig. 4. The microprocessor uses these flags to test data conditions.
Fig. 4 Flag register
For example, after an addition of two numbers, if the result in the accumulator is larger than 8-bit, the flip-flop uses to indicate a carry by setting CY flag to 1. When an arithmetic operation results in zero, Z flag is set to 1. The S flag is just a copy of the bit D7 of the accumulator. A negative number has a 1 in bit D7 and a positive number has a 0 in 2’s complement representation. The AC flag is set to 1, when a carry result from bit D3 and passes to bit D4. The P flag is set to 1, when the result in accumulator contains even number of 1s.
Program Counter (PC)
This 16-bit register deals with sequencing the execution of instructions. This register is a memory pointer. The microprocessor uses this register to sequence the execution of the instructions. The function of the program counter is to point to the memory address from which the next byte is to be fetched. When a byte is being fetched, the program counter is automatically incremented by one to point to the next memory location.
Stack Pointer (SP)
The stack pointer is also a 16-bit register, used as a memory pointer. It points to a memory location in R/W memory, called stack. The beginning of the stack is defined by loading 16- bit address in the stack pointer.
Instruction Register/Decoder
It is an 8-bit register that temporarily stores the current instruction of a program. Latest instruction sent here from memory prior to execution. Decoder then takes instruction and decodes or interprets the instruction. Decoded instruction then passed to next stage.
Control Unit
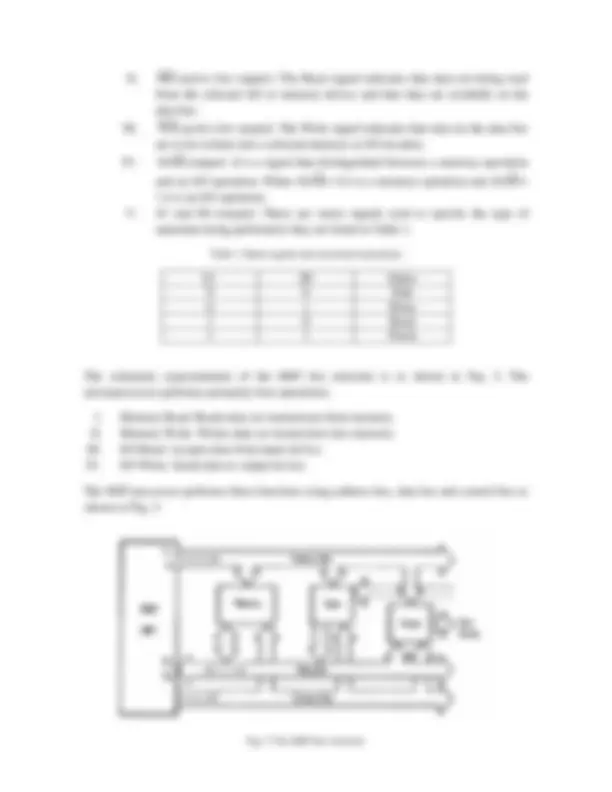
Generates signals on data bus, address bus and control bus within microprocessor to carry out the instruction, which has been decoded. Typical buses and their timing are described as follows:
Data Bus : Data bus carries data in binary form between microprocessor and other external units such as memory. It is used to transmit data i.e. information, results of arithmetic etc between memory and the microprocessor. Data bus is bidirectional in nature. The data bus width of 8085 microprocessor is 8-bit i.e. 2^8 combination of binary digits and are typically identified as D0 – D7. Thus size of the data bus determines what arithmetic can be done. If only 8-bit wide then largest number is 11111111 (255 in decimal). Therefore, larger numbers have to be broken down into chunks of 255. This slows microprocessor. Address Bus : The address bus carries addresses and is one way bus from microprocessor to the memory or other devices. 8085 microprocessor contain 16-bit address bus and are generally identified as A0 - A15. The higher order address lines (A8 – A15) are unidirectional and the lower order lines (A0 – A7) are multiplexed (time-shared) with the eight data bits (D0 – D7) and hence, they are bidirectional. Control Bus : Control bus are various lines which have specific functions for coordinating and controlling microprocessor operations. The control bus carries control signals partly unidirectional and partly bidirectional. The following control and status signals are used by 8085 processor: I. ALE (output): Address Latch Enable is a pulse that is provided when an address appears on the AD0 – AD7 lines, after which it becomes 0.
Properties:
It is a 8-bit microprocessor Manufactured with N-MOS technology 40 pin IC package It has 16-bit address bus and thus has 2^16 = 64 KB addressing capability. Operate with 3 MHz single-phase clock +5 V single power supply
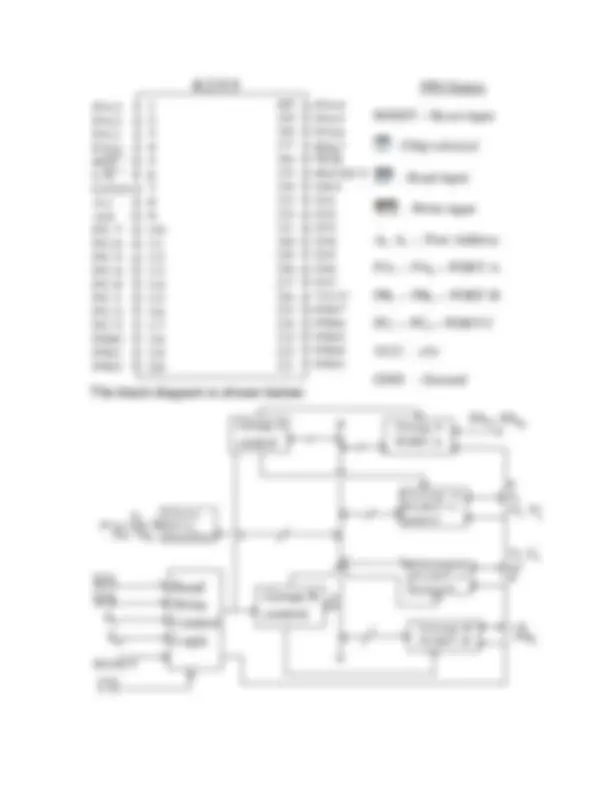
The logic pin layout and signal groups of the 8085nmicroprocessor are shown in Fig. 6. All the signals are classified into six groups:
Address bus Data bus Control & status signals Power supply and frequency signals Externally initiated signals Serial I/O signals
Fig. 6 8085 microprocessor pin layout and signal groups
Address and Data Buses:
A8 – A15 (output, 3-state): Most significant eight bits of memory addresses and the eight bits of the I/O addresses. These lines enter into tri-state high impedance state during HOLD and HALT modes. AD0 – AD7 (input/output, 3-state): Lower significant bits of memory addresses and the eight bits of the I/O addresses during first clock cycle. Behaves as data bus
during third and fourth clock cycle. These lines enter into tri-state high impedance state during HOLD and HALT modes.
Control & Status Signals:
ALE: Address latch enable RD: Read control signal. WR: Write control signal. IO/M, S1 and S0 : Status signals.
Power Supply & Clock Frequency:
Vcc: +5 V power supply Vss: Ground reference X1, X2: A crystal having frequency of 6 MHz is connected at these two pins CLK: Clock output
Externally Initiated and Interrupt Signals:
RESET IN: When the signal on this pin is low, the PC is set to 0, the buses are tri- stated and the processor is reset. RESET OUT: This signal indicates that the processor is being reset. The signal can be used to reset other devices. READY: When this signal is low, the processor waits for an integral number of clock cycles until it goes high. HOLD: This signal indicates that a peripheral like DMA (direct memory access) controller is requesting the use of address and data bus. HLDA: This signal acknowledges the HOLD request. INTR: Interrupt request is a general-purpose interrupt. INTA: This is used to acknowledge an interrupt. RST 7.5, RST 6.5, RST 5,5 – restart interrupt: These are vectored interrupts and have highest priority than INTR interrupt. TRAP: This is a non-maskable interrupt and has the highest priority.
Serial I/O Signals:
SID: Serial input signal. Bit on this line is loaded to D7 bit of register A using RIM instruction. SOD: Serial output signal. Output SOD is set or reset by using SIM instruction.
Table 3 Examples of two byte instructions Opcode Operand Machine code/Hex code Byte description MVI A, 7FH 3E First byte 7F Second byte ADI 0FH C6 First byte 0F Second byte
Table 4 Examples of three byte instructions Opcode Operand Machine code/Hex code Byte description JMP 9050H C3 First byte 50 Second byte 90 Third byte LDA 8850H 3A First byte 50 Second byte 88 Third byte
Addressing Modes in Instructions:
The process of specifying the data to be operated on by the instruction is called addressing. The various formats for specifying operands are called addressing modes. The 8085 has the following five types of addressing:
I. Immediate addressing II. Memory direct addressing III. Register direct addressing IV. Indirect addressing V. Implicit addressing
Immediate Addressing:
In this mode, the operand given in the instruction - a byte or word – transfers to the destination register or memory location.
Ex: MVI A, 9AH
The operand is a part of the instruction. The operand is stored in the register mentioned in the instruction.
Memory Direct Addressing:
Memory direct addressing moves a byte or word between a memory location and register. The memory location address is given in the instruction.
Ex: LDA 850FH
This instruction is used to load the content of memory address 850FH in the accumulator.
Register Direct Addressing:
Register direct addressing transfer a copy of a byte or word from source register to destination register.
Ex: MOV B, C
It copies the content of register C to register B.
Indirect Addressing:
Indirect addressing transfers a byte or word between a register and a memory location.
Ex: MOV A, M
Here the data is in the memory location pointed to by the contents of HL pair. The data is moved to the accumulator.
Implicit Addressing
In this addressing mode the data itself specifies the data to be operated upon.
Ex: CMA
The instruction complements the content of the accumulator. No specific data or operand is mentioned in the instruction.
Data Transfer Instructions:
Arithmetic Instructions: