


Motion -II
























































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
How to represent translation and rotation transformations in matrix form using homogeneous coordinates. It covers both 2-d and 3-d rotations and translations.
Typology: Assignments
1 / 69

This page cannot be seen from the preview
Don't miss anything!
-^
-^
-^
-^
-^
-^
-^
-^
-^
rc
-^
mn
m
m
2n
22
21
1n
12
11
⎤ ⎥ ⎥ ⎥⎦
2 3 v v v
v
1
-^
right
affect vector first
-^
(^
)
(^
)^
v
v M
M
−^1
w.r.t. each other
world coordinates X Z
Y
Z X
Y
-^
[x’, y’, z’] = [x/w, y/w, z/w]
-^
-^
For convenience we usually describe objects in relation totheir own coordinate system–
Solar system example
-^
We can
translate
or move points to a new position by
adding offsets to their coordinates:–
Note that this translates all points uniformly
⎤ ⎥ ⎥ ⎥⎦ ⎡ ⎢ ⎢ ⎢⎣
⎤ ⎥ ⎥ ⎥⎦ ⎡ ⎢ ⎢ ⎢⎣ = ⎤ ⎥ ⎥ ⎥⎦
⎡ ⎢ ⎢ ⎢⎣
xt yt zt
x y z
x y z
' ' '
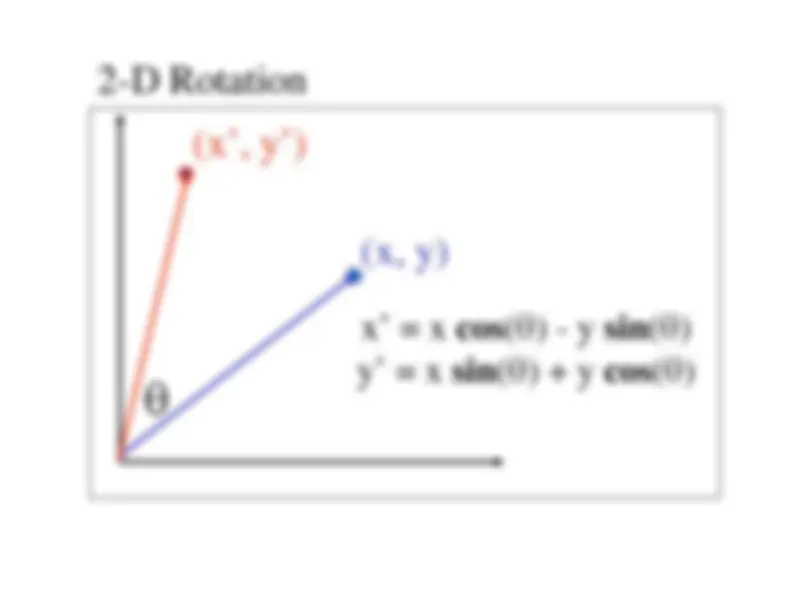
Rotations in 2-D are easy:
-^
3-D is more complicated–
Need to specify an
axis of rotation
-^
Common pedagogy: express rotation about this axis as thecomposition of
canonical rotations
-^
Canonical rotations: rotation about X-axis, Y-axis, Z-axis
⎤ ⎥ ⎦ ⎡ ⎢ ⎣ ⎤ ⎥ ⎦
⎡ ⎢ ⎣
θ
θ
θ
−
θ
= ⎤ ⎥ ⎦ ⎡ ⎢ ⎣
x y
x y
cos
sin
sin
cos
' '
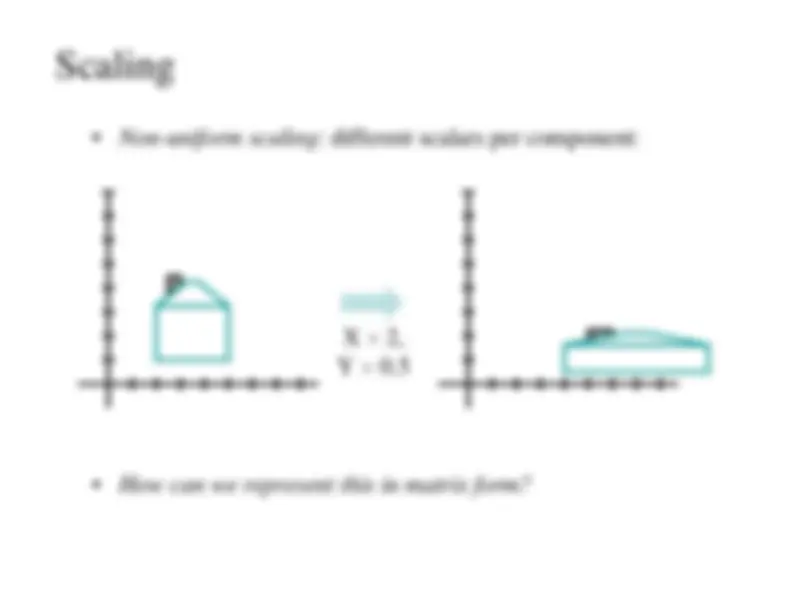
Scaling
a coordinate means multiplying each of its
components by a scalar
-^
Uniform scaling
means this scalar is the same for all
components:
-^
-^
⎤ ⎥ ⎥ ⎥⎦
⎤ ⎥ ⎥ ⎥⎦
⎡ ⎢ ⎢ ⎢⎣
ax by^ cz
x y z
' ' '
⎤ ⎥ ⎥ ⎥⎦ ⎡ ⎢ ⎢ ⎢⎣ ⎤ ⎥ ⎥ ⎥⎦
⎤ ⎥ ⎥ ⎥⎦
⎡ ⎢ ⎢ ⎢⎣
x y z
c
b
a
x y z
0
0
0
0
0
0
' ' '
scaling matrix
-^
-^
axis of rotation
⎤ ⎥ ⎦ ⎡ ⎢ ⎣ ⎤ ⎥ ⎦
⎡ ⎢ ⎣
θ
θ
θ
−
θ
= ⎤ ⎥ ⎦ ⎡ ⎢ ⎣
x^ y
x y
cos
sin
sin
cos
' '