



Animal Gaits
Docsity.com






Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
An in-depth exploration of animal gaits, focusing on quadrupeds. It discusses the evolution of the tetrapod ancestor and the underlying construction of quadrupeds, including their bones and joints. The document also covers various stances and gaits, such as walk, amble, trot, pace, rack, canter, transverse gallop, rotary gallop, and bounding gaits. It also touches upon hexapod and octopod gaits, making it a valuable resource for students of zoology, biology, and animal behavior.
Typology: Slides
1 / 25

This page cannot be seen from the preview
Don't miss anything!
All land based vertebrates evolved from an original ‘tetrapod’ ancestor The tetrapod was like a primitive reptile- closer to a fish The 4 legs were adaptations of swimming fins and the creature moved on land by a combination of ‘paddling’ with its legs and ‘swimming’ with it’s spine All present day quadruped vertebrates are based on the same underlying construction, but with various adaptations Even snakes, birds, dolphins, and whales evolved from the ancestral tetrapod and still show many similarities
Some animals, such as humans and bears walk flat footed (palmate) Some, like horses and cattle walk more on their fingers (digitate) Smaller or stockier animals sometimes walk with wide stances (sprawling gaits) (these include insects, many reptiles, and some small mammals) Larger animals tend to walk with straighter legs
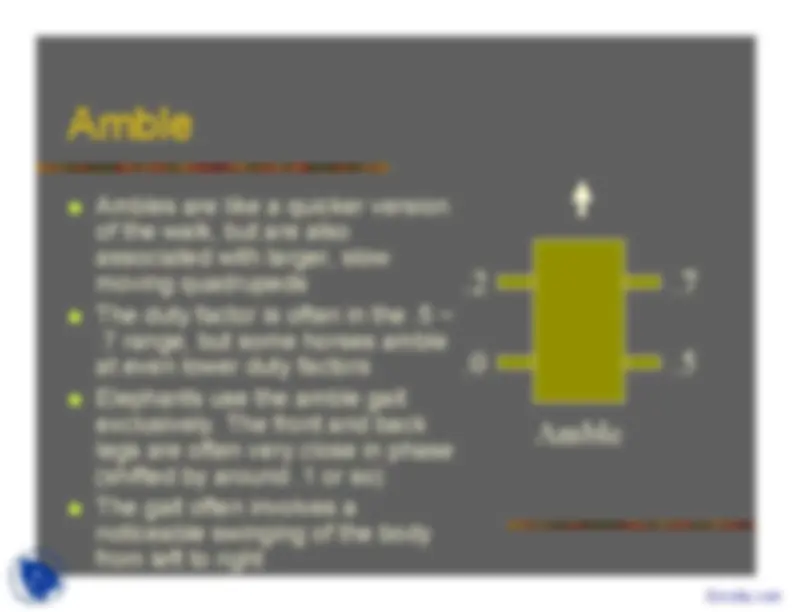
The basic slow gait of most quadrupeds is the walk Very slow walks may involve 3-4 legs on the ground, but normal walks involve 3 legs on the ground with a brief moment with only 2 The duty factor is therefore relatively high (.6 ~ .8) Actual timing of walk gaits may vary from the diagram
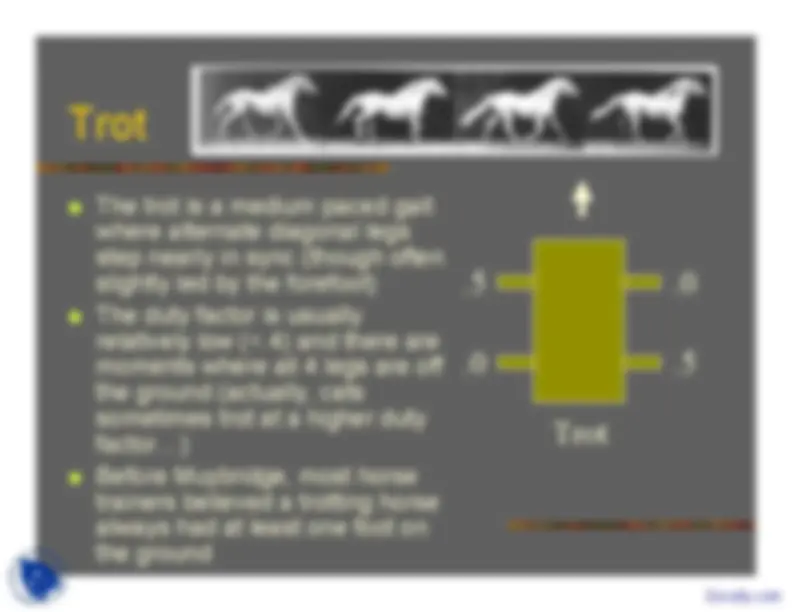
The trot is a medium paced gait where alternate diagonal legs step nearly in sync (though often slightly led by the forefoot) The duty factor is usually relatively low (<.4) and there are moments where all 4 legs are off the ground (actually, cats sometimes trot at a higher duty factor…) Before Muybridge, most horse trainers believed a trotting horse always had at least one foot on the ground
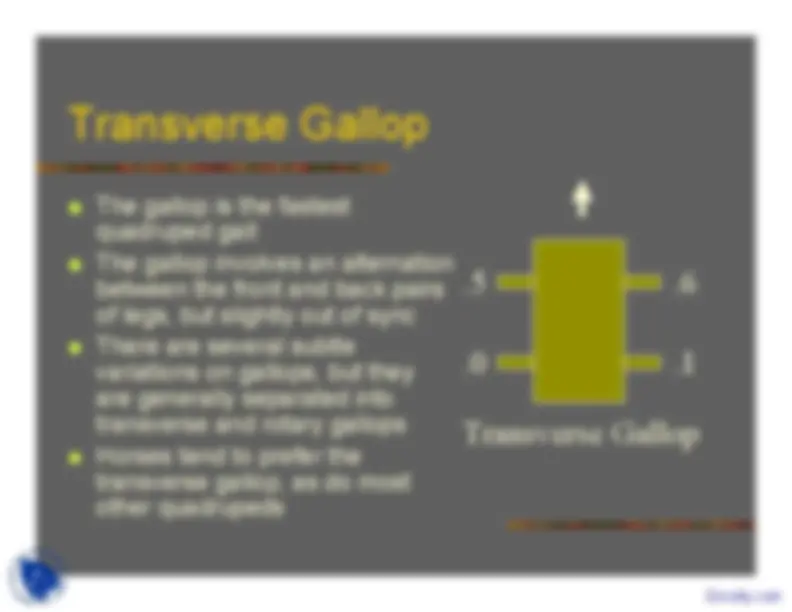
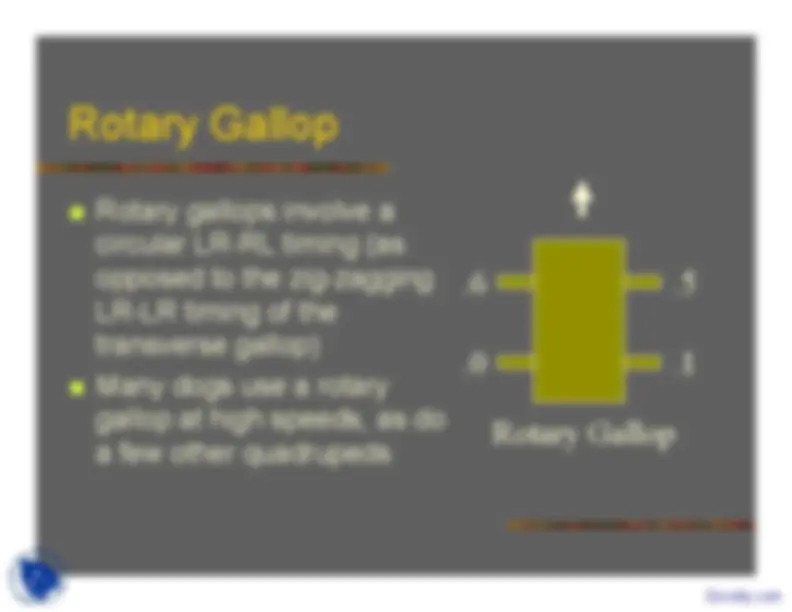
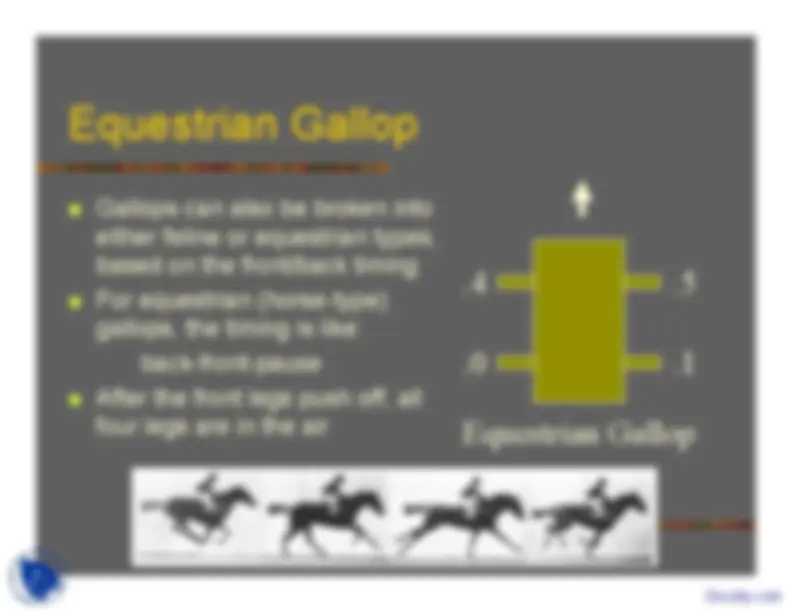
The gallop is the fastest quadruped gait The gallop involves an alternation between the front and back pairs of legs, but slightly out of sync There are several subtle variations on gallops, but they are generally separated into transverse and rotary gallops Horses tend to prefer the transverse gallop, as do most other quadrupeds
For feline (cat-type) gallops, the timing is like: front-back-pause After the back legs push off, all four legs are in the air This sometimes known as a leaping gait