



Mechanics
Physics 151
Lecture 4
Hamilton’s Principle
(Chapter 2)






Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Mechanics, Physics, Hamilton’s Principle, Configuration Space, Action Integral, Infinitesimal Path Difference, Calculus of Variations, Lagrange’s Equation, Notation of Variation, Momentum Conservation, Generalized Momentum, Angular Momentum, Conservation Laws.
Typology: Study notes
1 / 26

This page cannot be seen from the preview
Don't miss anything!
Hamilton’s Principle(Chapter 2)
Administravia!^ Problem Set #1 due^!
Solutions will be posted on the web after this lecture
Due next Thursday
I will be attending a workshop at Stanford
Today’s Goals!^ Discuss Hamilton’s Principle^!
Derive Lagrange’s Eqn from Hamilton’s Principle! Calculus of variation! Looks unfamiliar, but not so difficult
Using Lagrangian formalism! Linear, angular momenta! Connection between symmetry, invariance of theLagrangian, and conservation of generalized momentum
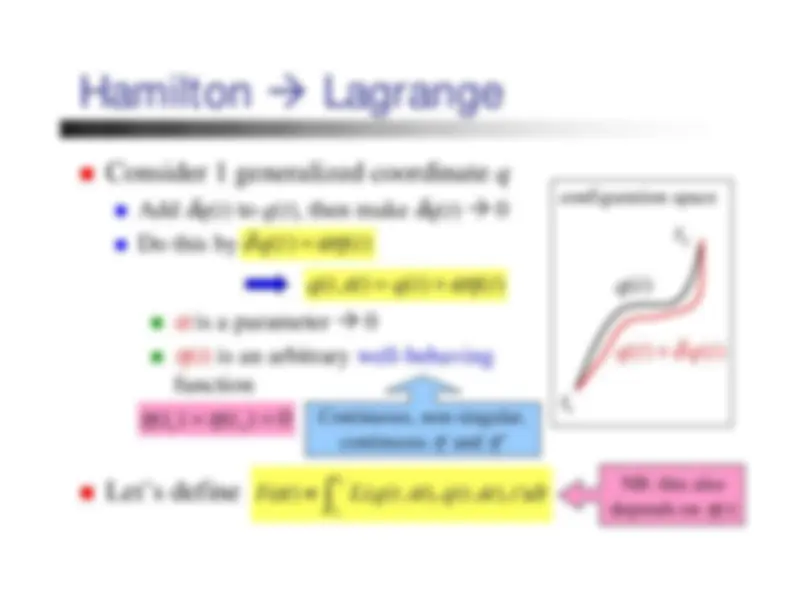
Configuration Space!^ Generalized coordinates
!^ Each point in this space (
q ,...,^1
q )n^
corresponds to one configuration of the system! Time evolution of the system
"^ A curve in the
configuration space
configurationspace
real space
configuration space
Hamilton’s Principle!^ This is equivalent to Lagrange’s Equations^!
We will prove this
Newton’s Eqn depends explicitly on
x-y-z
coordinates
!^ Lagrange’s Eqn is same for any generalized coordinates!^ Hamilton’s Principle refers to no coordinates^!
Everything is in the action integral
We will also define “stationary”
Hamilton’s Principle is more fundamental
probably...
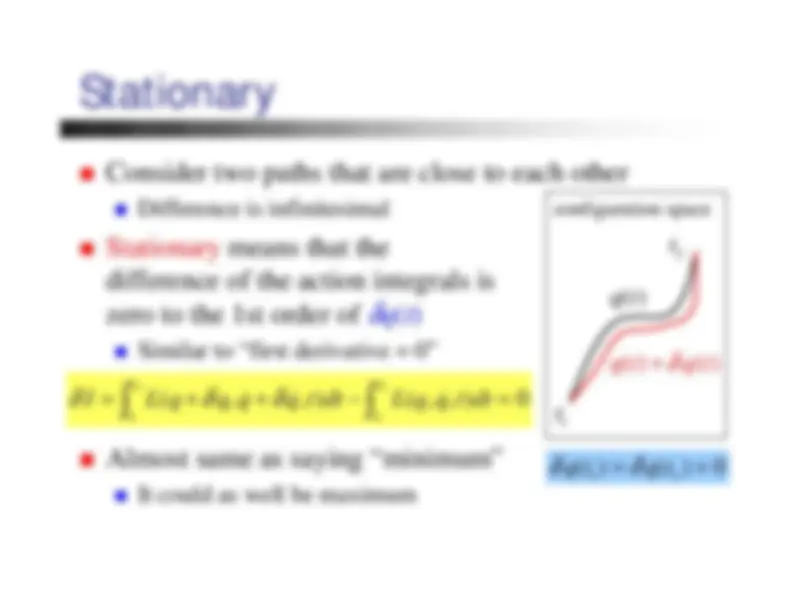
Stationary!^ Consider two paths that are close to each other^!
Difference is infinitesimal
δ q ( t )
configuration space t^1
t^2 ( ) q t ( )^
q t^
2
2
1
1
t^
t
t^
t
L q^
q q^
q t dt
L q q t dt
δ
δ^
δ
=^
∫^
∫ !^
1
2 ( )^
q t^
q t
Hamilton
"
Lagrange
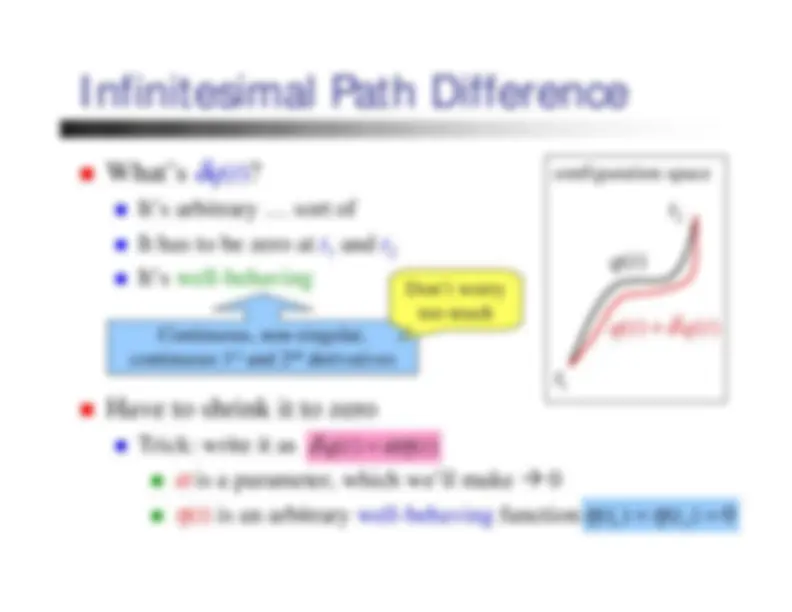
!^ Add
q ( t ), then make
!^ Do this by^!
t ) is an arbitrary well-behavingfunction
q t^
t
η' and
η''
(^21) (^ )^
t t I^
L q t
q t
t dt
≡^ ∫^
q t^
q t^
t
1
2 ( )^
t^
t
configuration space t^1
t^2 ( ) q t ( )^
q t^
NB: this alsodepends on
η( t )
Calculus of Variations!^ Let’s define^!
If the action is stationary
(^21) (^ )^
t t I^
L q t
q t
t dt
=^ ∫^
0 (^ )^
dI d
(^21) (^ )^
t t dI^
L dq
L dq
dt
d^
q d^
q d
∫^
Some work! t 2 L^ t 1
d^ L
dq
dt
q^ dt
q^
∫^
q t^
q t^
t
Arbitrary function
for any
NB: this alsodepends on
η( t )
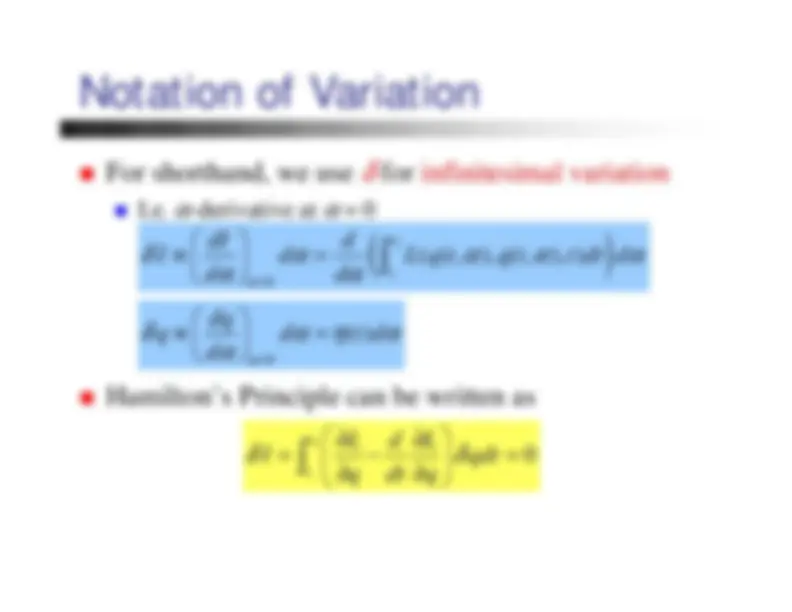
Notation of Variation!^ For shorthand, we use
δ^ for infinitesimal variation
!^ I.e.
(^21)
tL t
d^
qdt q^ dt
q
∫^
0
dq q^
d^
t d
d^ α
(^
)
(^21) 0
t t
dI^
d
d^
L q t
q t
t dt d
d^
d α
= ^
∫^
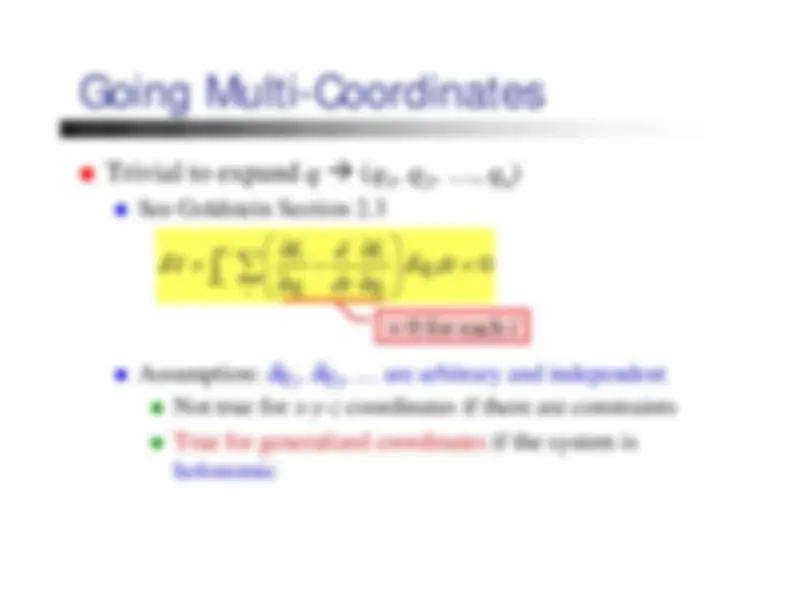
Going Multi-Coordinates!^ Trivial to expand
!^ See Goldstein Section 2.3!^ Assumption:
q , … are arbitrary and independent^2
!^ Not true for
x-y-z
coordinates if there are constraints
!^ True for generalized coordinates if the system isholonomic
(^21)
t
i
t^ i^
i^
i L^ d
q dt q^ dt
q
δ
δ
^
∑∫
!^ = 0 for each
i
Calculus of Variation!^ Technique has wider applications^!
In general for! Examples in Goldstein Section 2.2! Most famous: the brachistochrone problem
δ^ =
dy ′ ≡ y dx
x x J^
f^ y x
y^ ′ x^ x dx
=^ ∫
f^ d
f y^ dx
^ y
Fastest path via gravity
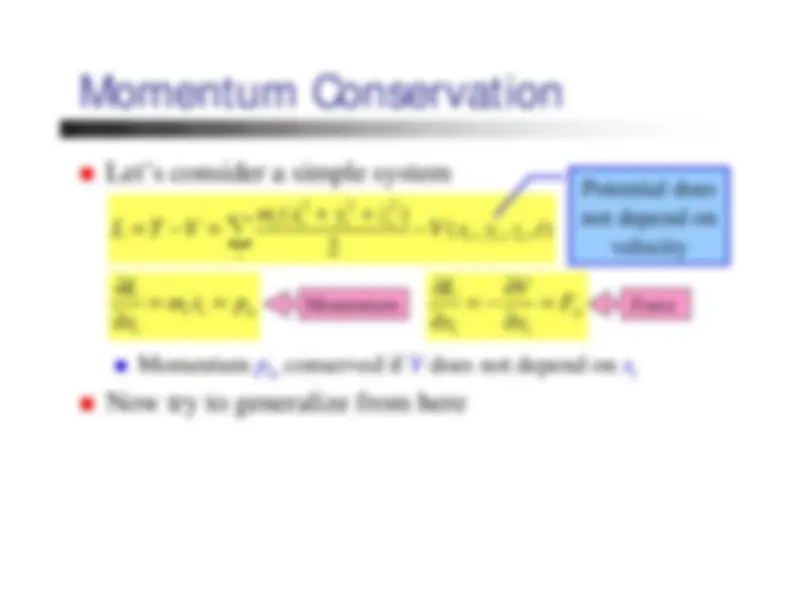
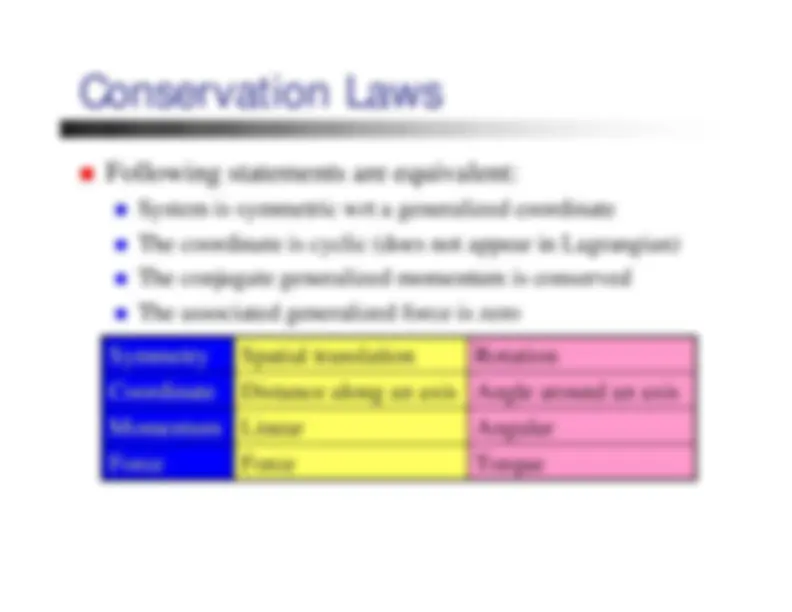
Conservation Laws!^ We’ve seen (in Lectures 1&2) conservation of linear,angular momenta and energy in Newtonian mechanics^!
How do they work with Lagrange’s equations?! Should better be the same…
They are, in fact, limitations we ignored so far
Generalized Momentum!^ Let’s call
!^ Also known as canonical or conjugate momentum!^ Equals to usual momentum for simple
x-y-z
coordinates
p is conserved if j^
L^ does not depend explicitly on
qj
!^ Such
q is called cyclic (or ignorable) j^
j
L j p^
∂≡! q ∂^
j
j dp^
dt^
∂− = q ∂
Generalized momentum associatedwith a cyclic coordinate is conserved
Linear momentumconservation is aspecial case
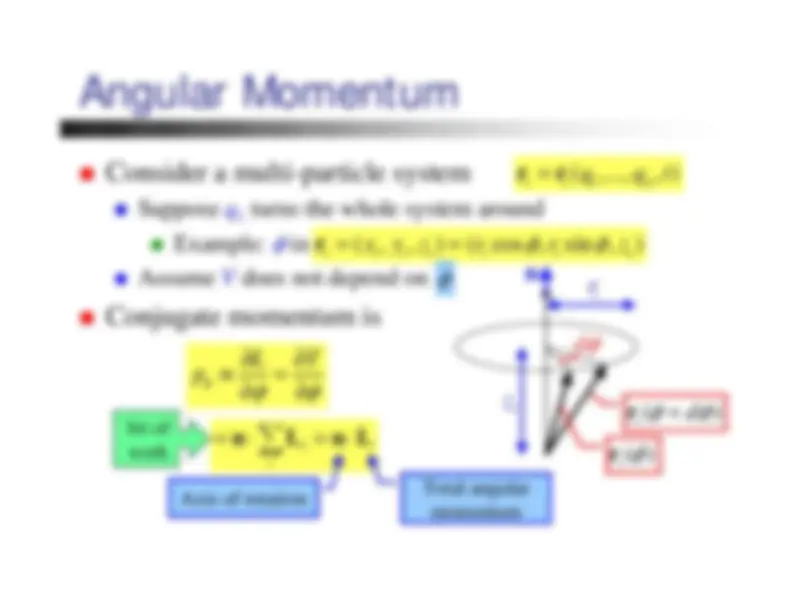
Generalized Momentum!^ Generalized momentum may not look like linearmomentum^!
Dimension may vary, if
q is not a space coordinate j^
!^ pqj
always has the dimension of action (= work j^
×^ time)
!^ Form may vary if
V^ depends on velocity
!^ Example: a particle in EM field
j
L j p^
∂≡! q ∂^
2 (^1) L mv^ 2
q^
q φ
=^
⋅ A v^
x^
x p^
mx^
qA =^
Extra term due to velocity-dependent potential