



Method of Consistent
Deformation
Theory of Structures-II
M Shahid Mehmood
Department of Civil Engineering
Swedish College of Engineering and Technology, Wah Cantt
Structural Analysis
By
R. C. Hibbeler























































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Theory of Structures-II. M Shahid Mehmood. Department of Civil Engineering. Swedish College of Engineering and Technology, Wah Cantt. Structural Analysis.
Typology: Summaries
1 / 98

This page cannot be seen from the preview
Don't miss anything!
Theory of Structures-II
M Shahid Mehmood
Department of Civil Engineering
Swedish College of Engineering and Technology, Wah Cantt
Structural Analysis
By
R. C. Hibbeler
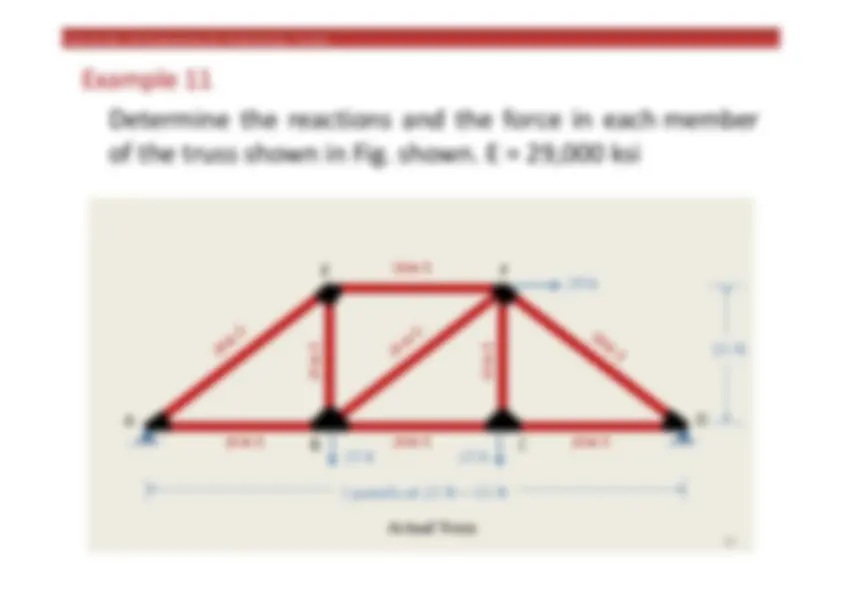
solving problems involving statically indeterminate
frames for single story and unusual geometry.
indeterminacy are best solved using the slope deflection
or moment distribution or the stiffness methods.
2
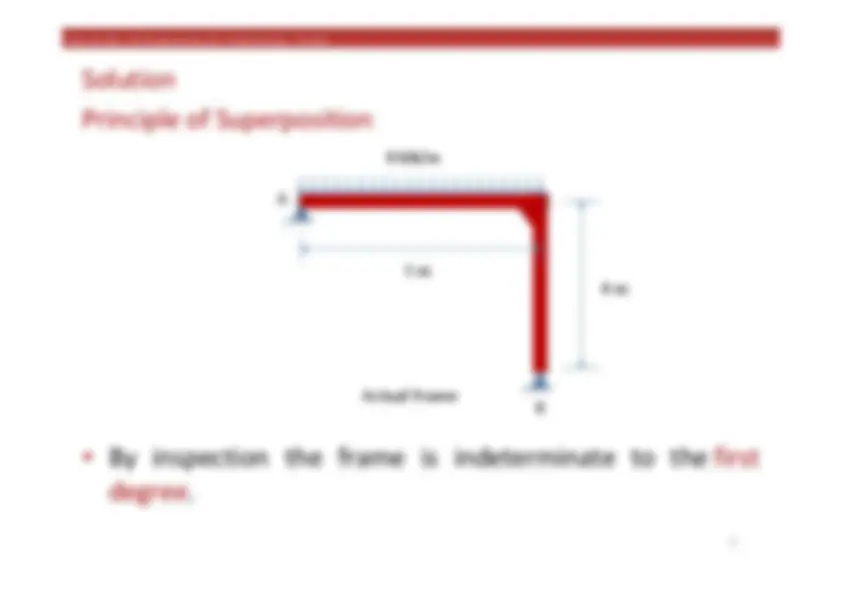
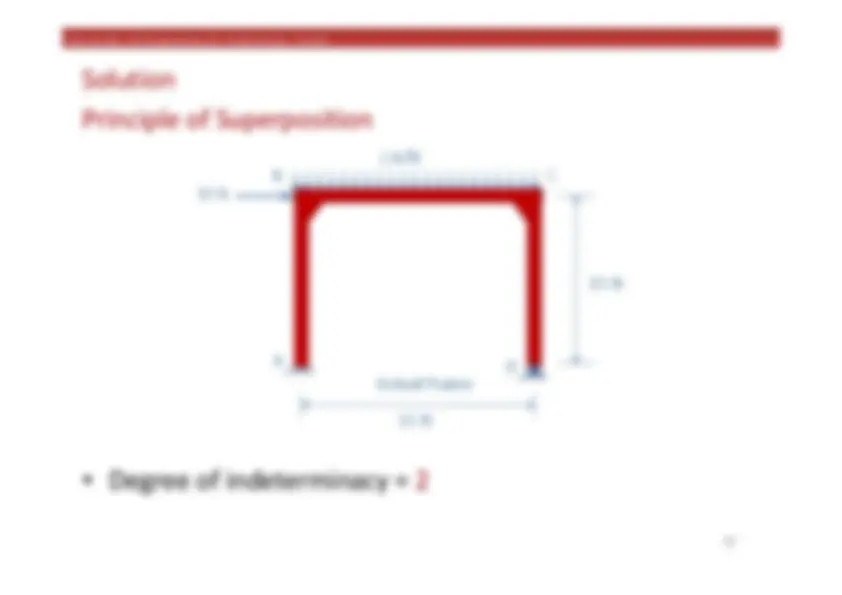
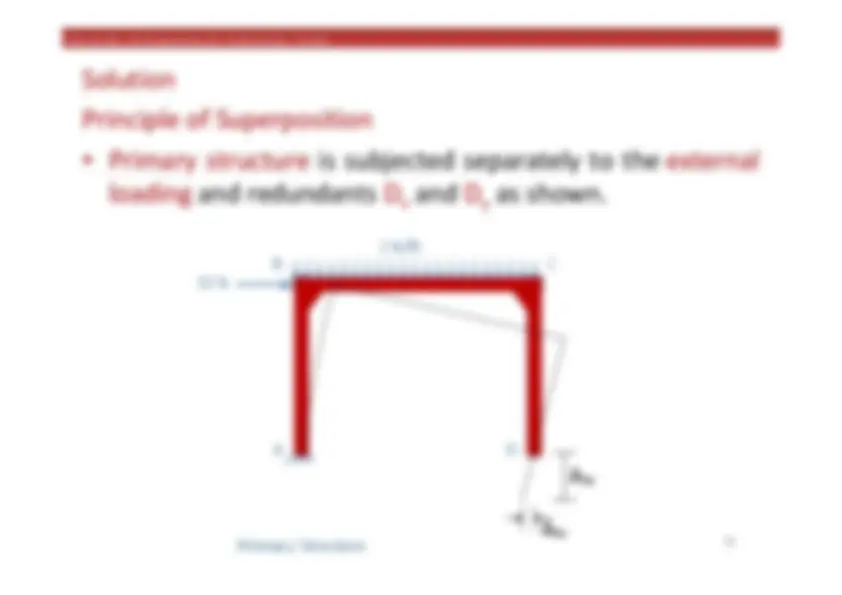
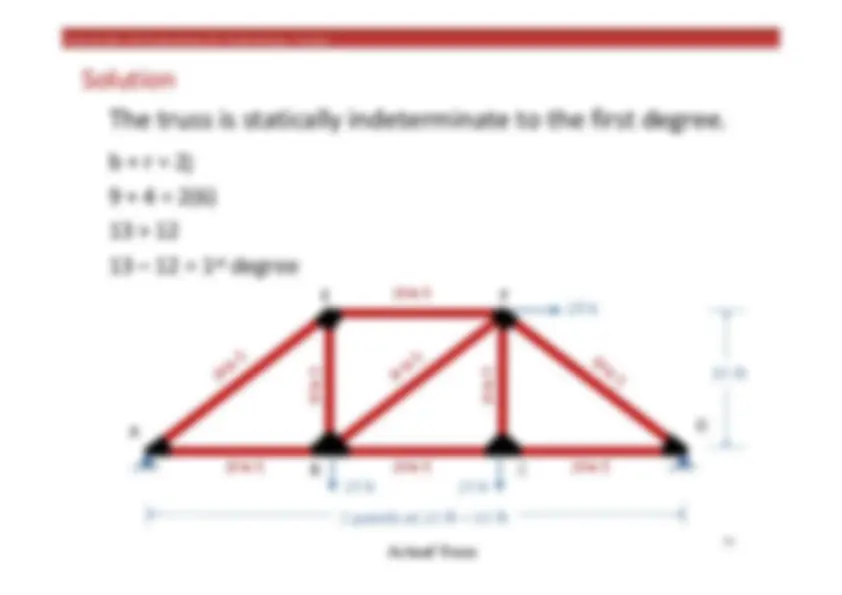
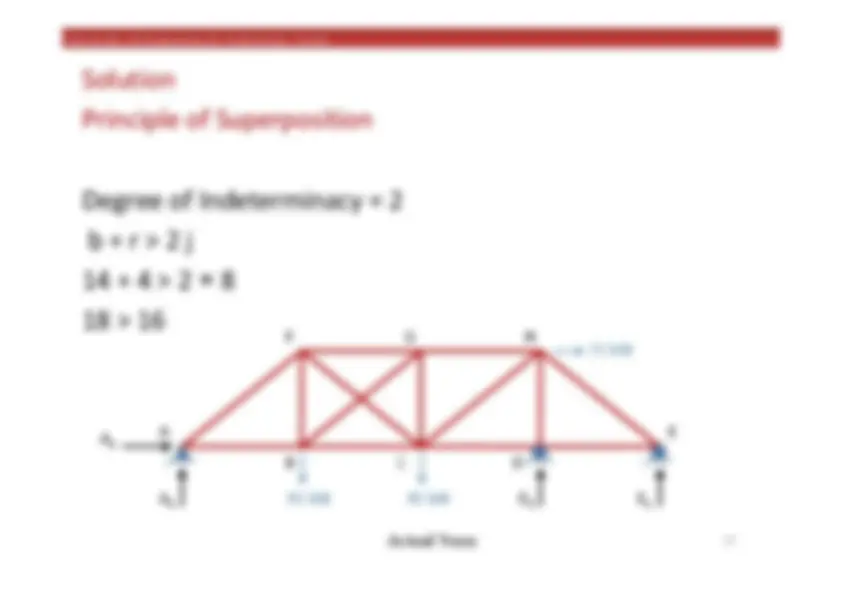
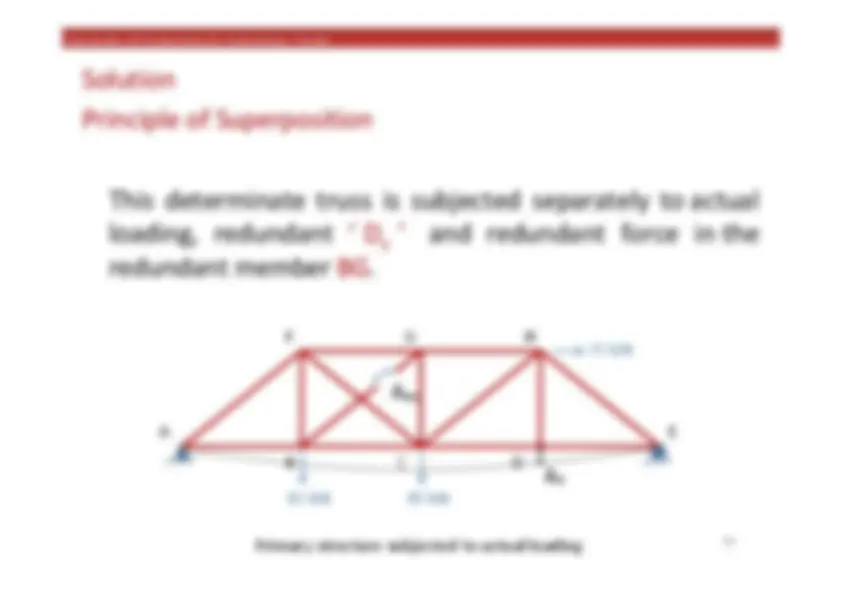
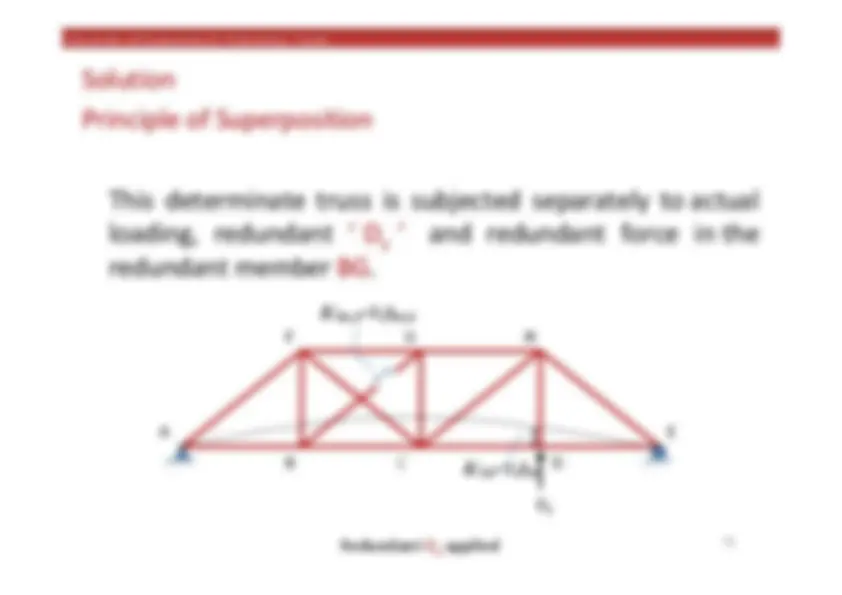
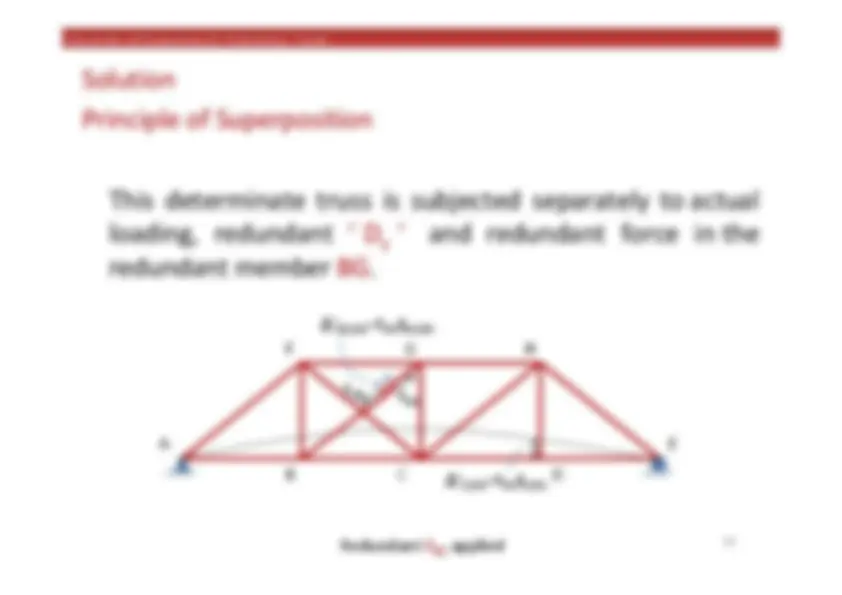
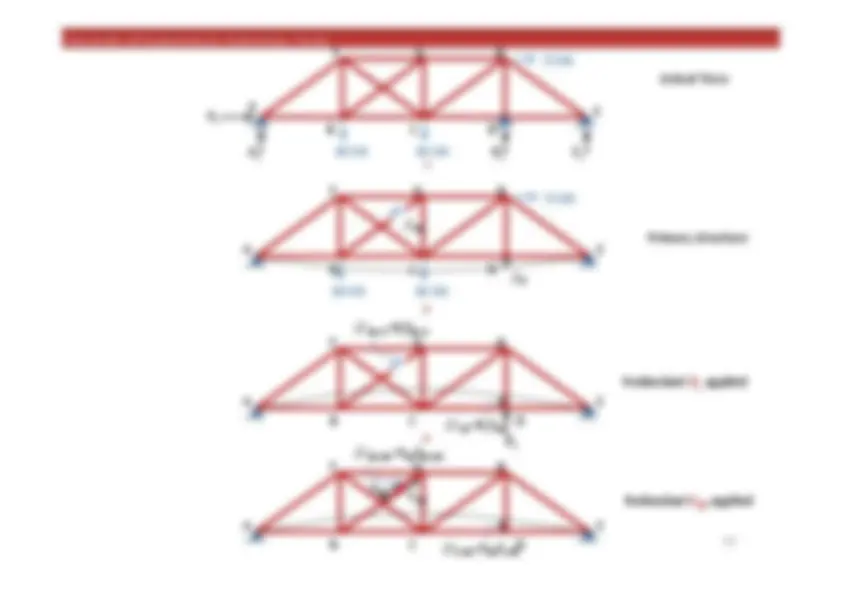
Solution
Principle of Superposition
degree.
4
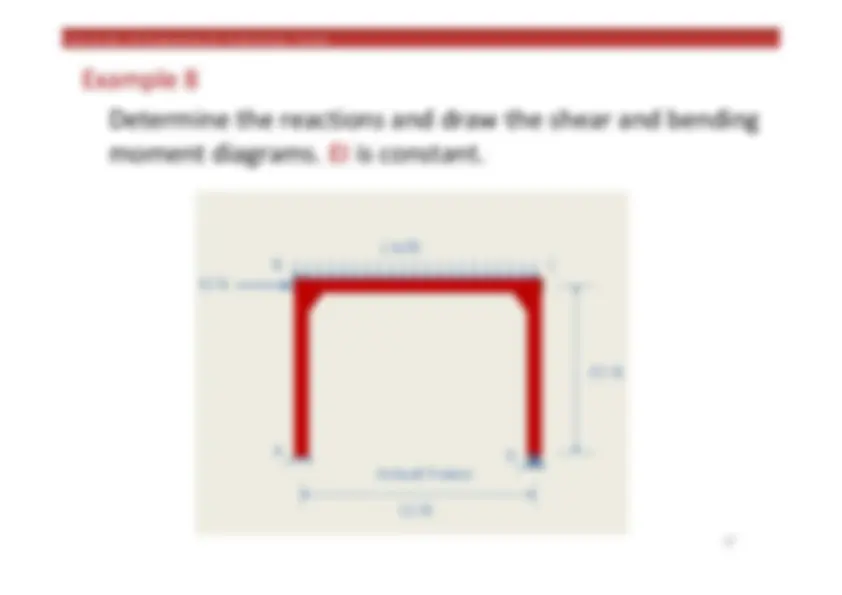
5 m
4 m
A
B
8 kN/m
Actual Frame
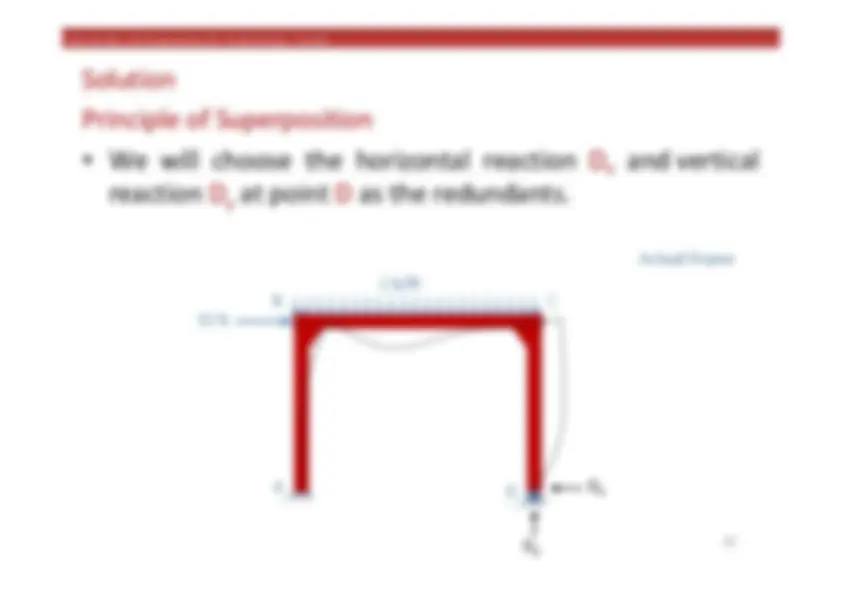
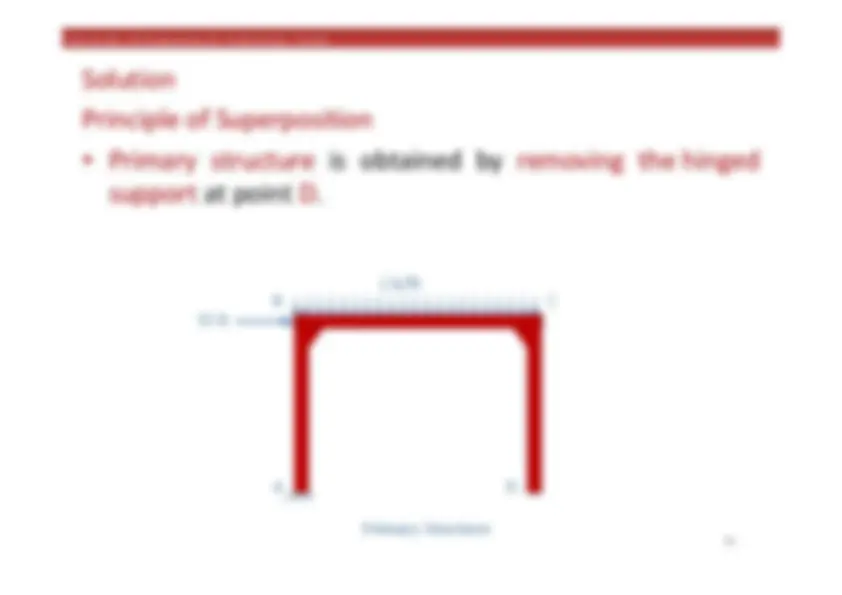
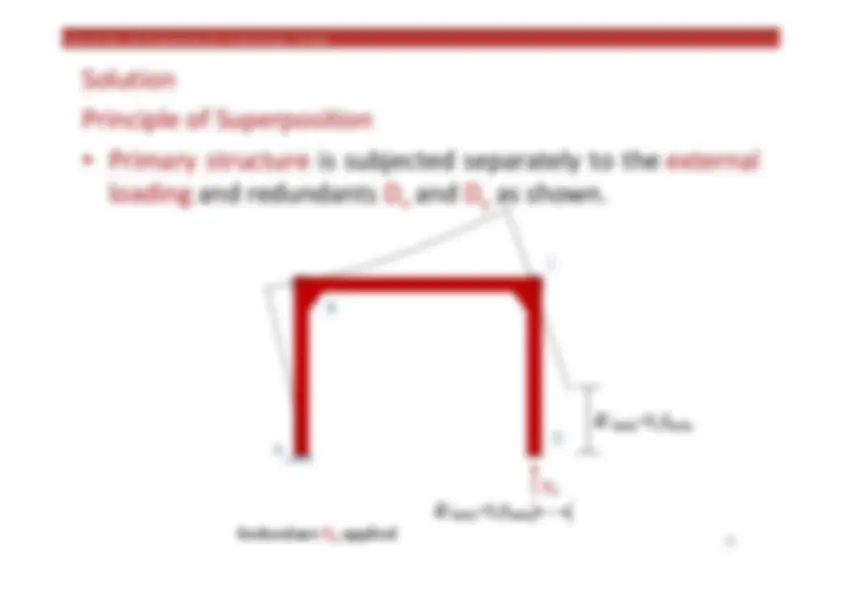
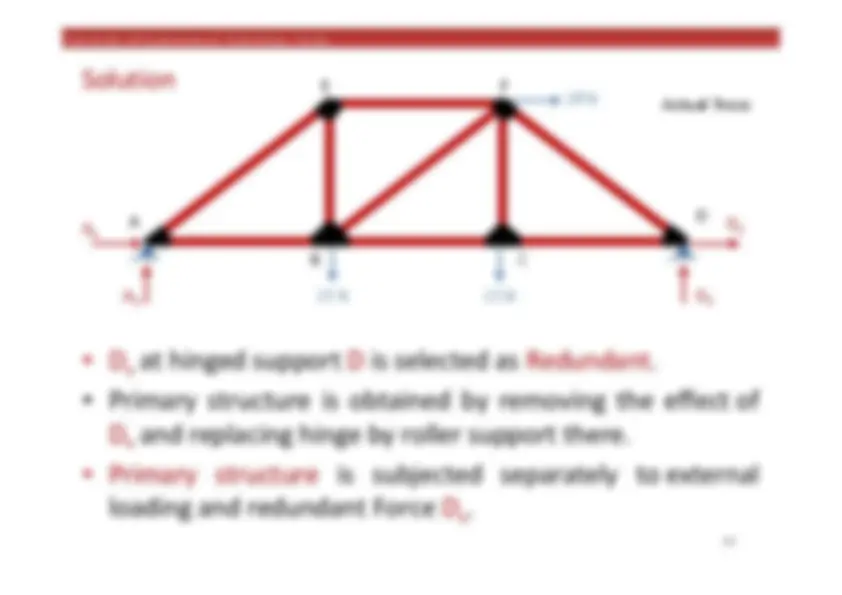
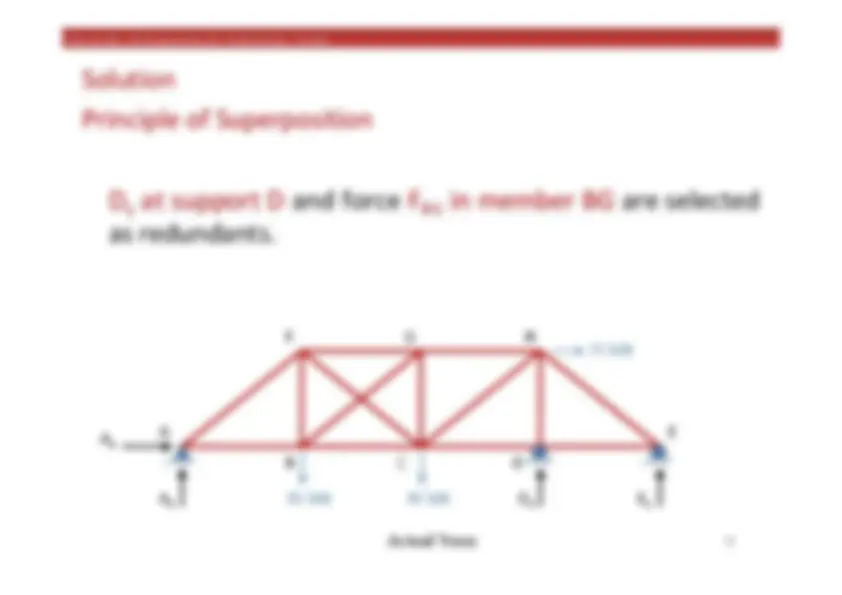
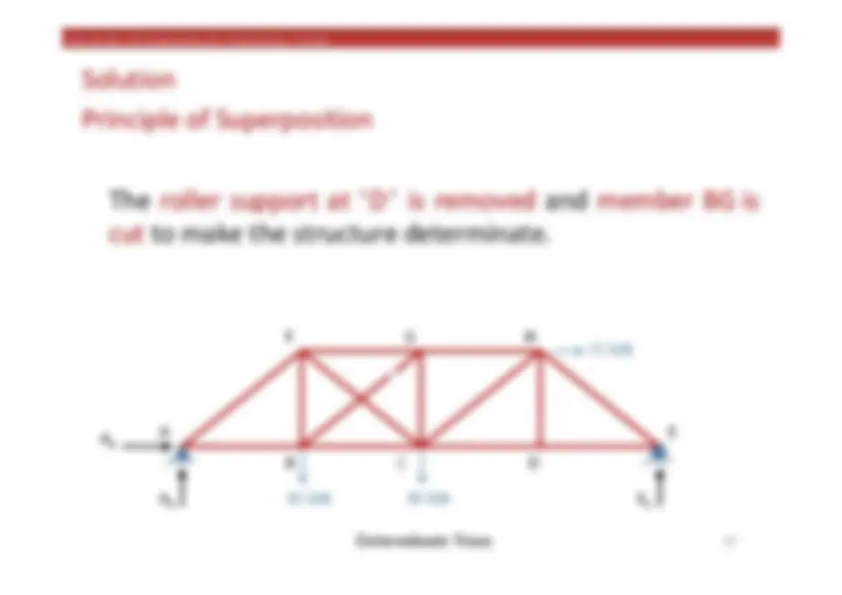
Solution
Principle of Superposition
the redundant.
not constraint B in the horizontal direction.
5
A
B
8 kN/m
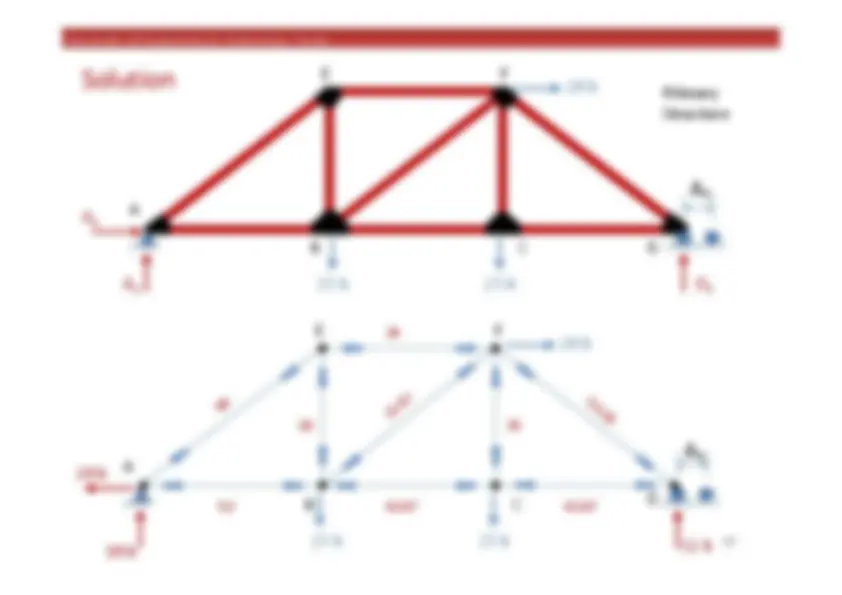
Primary Structure
Δ B
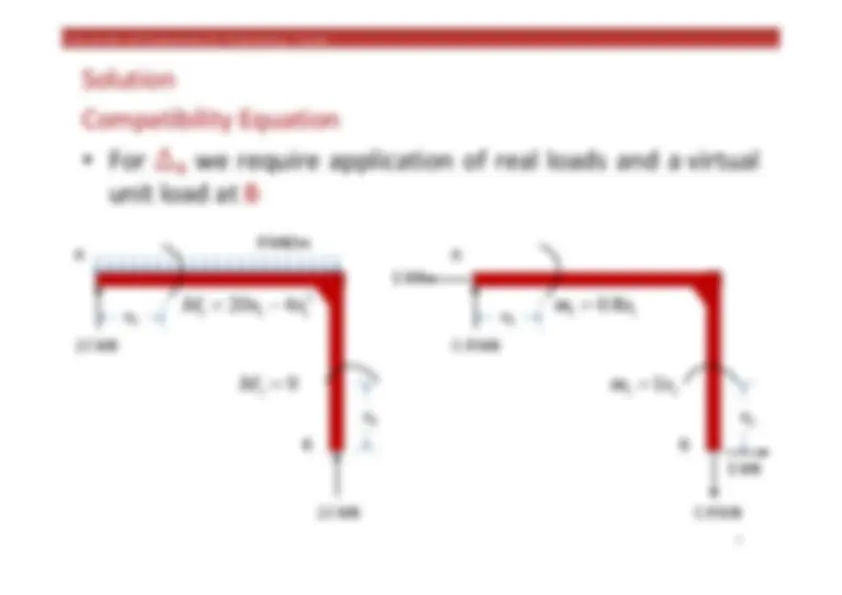
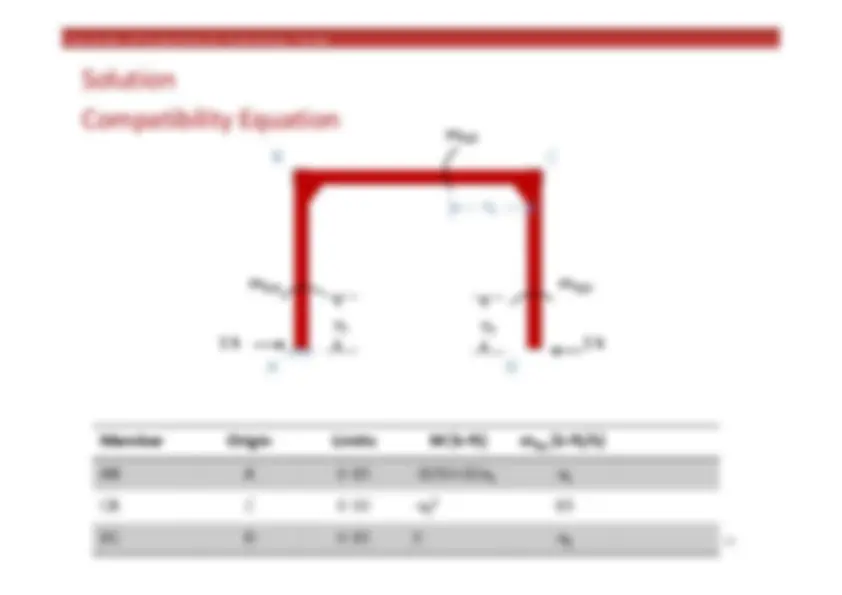
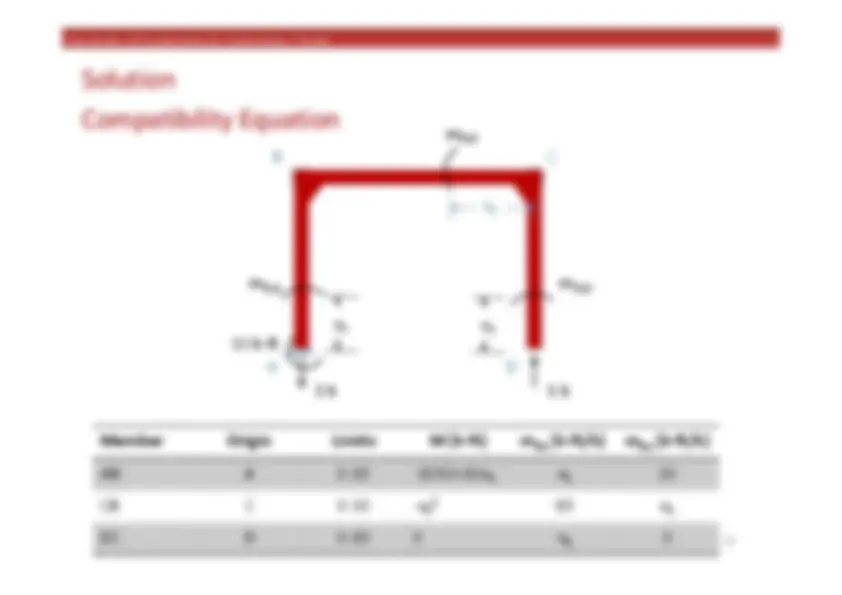
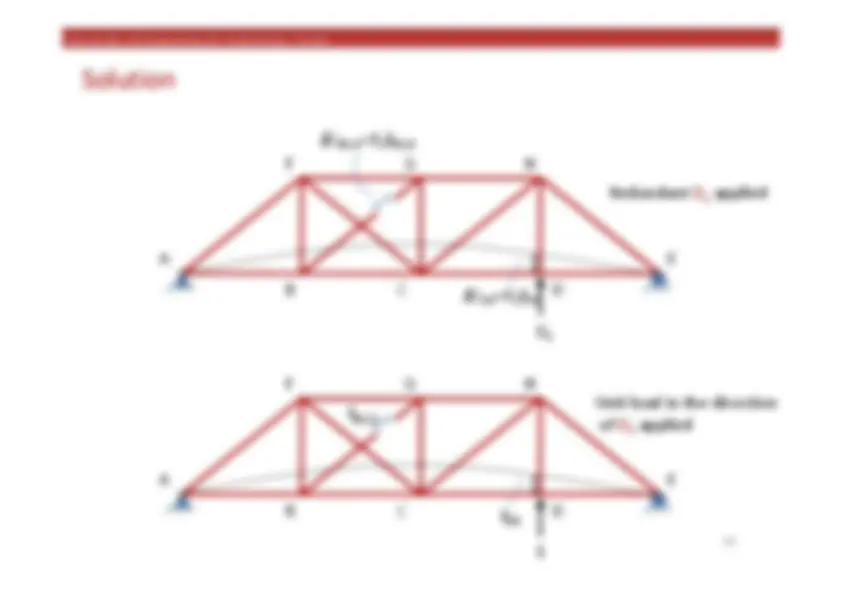
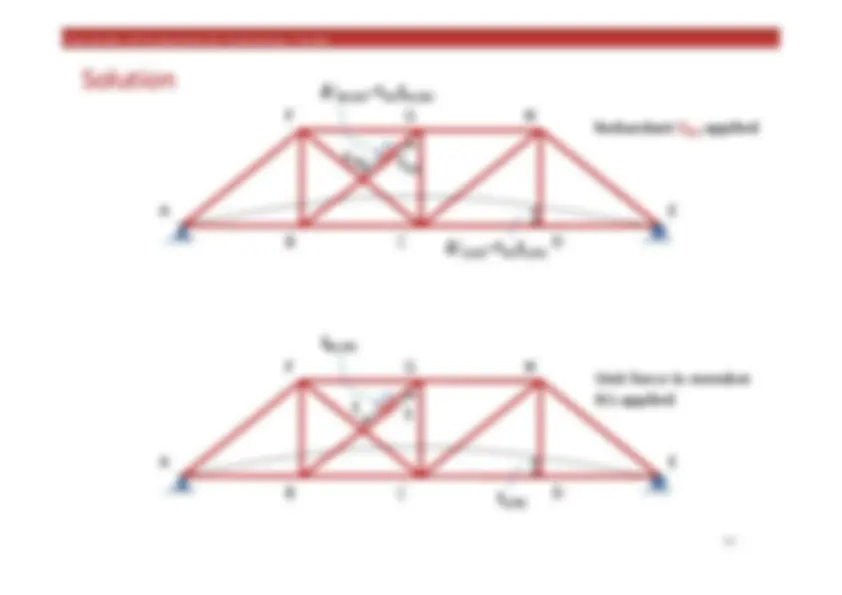
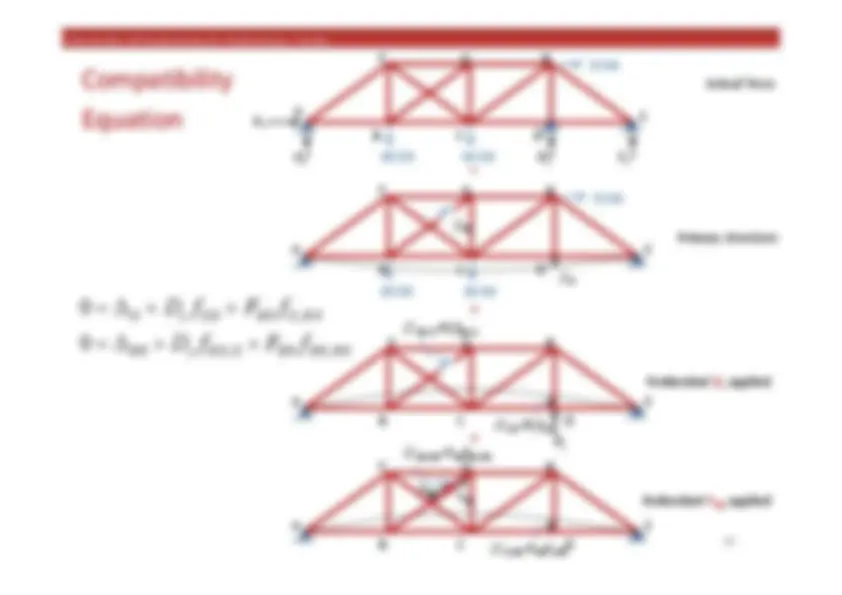
Solution
Compatibility Equation
7
A
B
8 kN/m
Primary Structure
Δ B
5 m
4 m
A
B
8 kN/m
Actual Frame
=
A
B
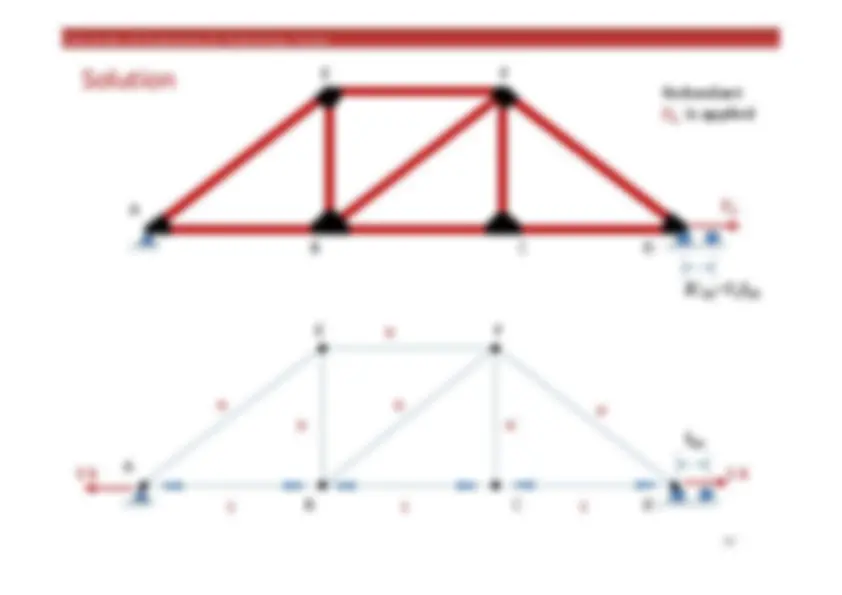
redundant B x
applied
B x
f BB
B x
B x BB
Δ B f
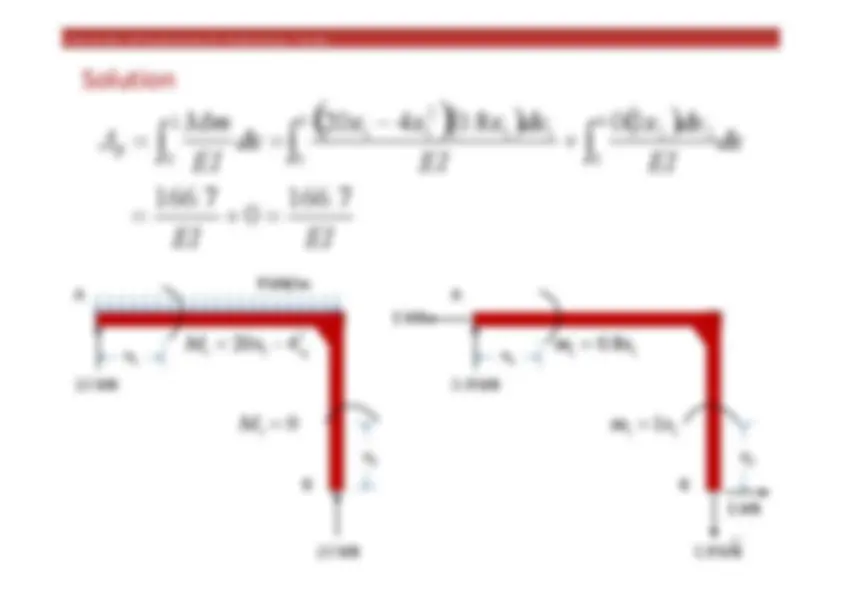
Solution
Compatibility Equation
and f BB
will be computed using the method
of virtual work.
shown in figure.
x 1
or x 2
be the same for both the real and virtual loadings.
8
B x BB
0 Δ B f
Solution
10
A
B
8 kN/m
x 1
20 kN
20 kN
x 2
2
1 1 1
20 4 x
M x
0 2
M
A
B
x 1
0.8 kN
0.8 kN
x 2
1 1
m 0. 8 x
2 2
m 1 x
1 kN
1 kN
dx
x dx
x x x dx
dx
Mm
L
B
5
0
4
0
1 1 2 2
2
1 1
0
Solution
Compatibility Equation
we require application of real unit load acting at B
and a virtual unit load acting at B
11
A
B
x 1
0.8 kN
0.8 kN
x 2
1 1
m 0. 8 x
2 2
m 1 x
1 kN
1 kN
Solution
Compatibility Equation
13
B x BB
Δ B f
x
3. 47 kN ANS
x
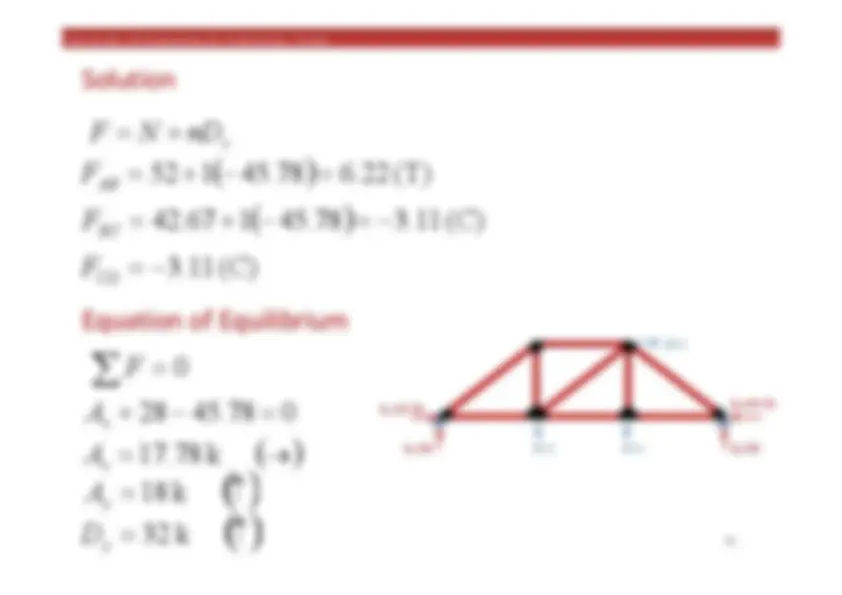
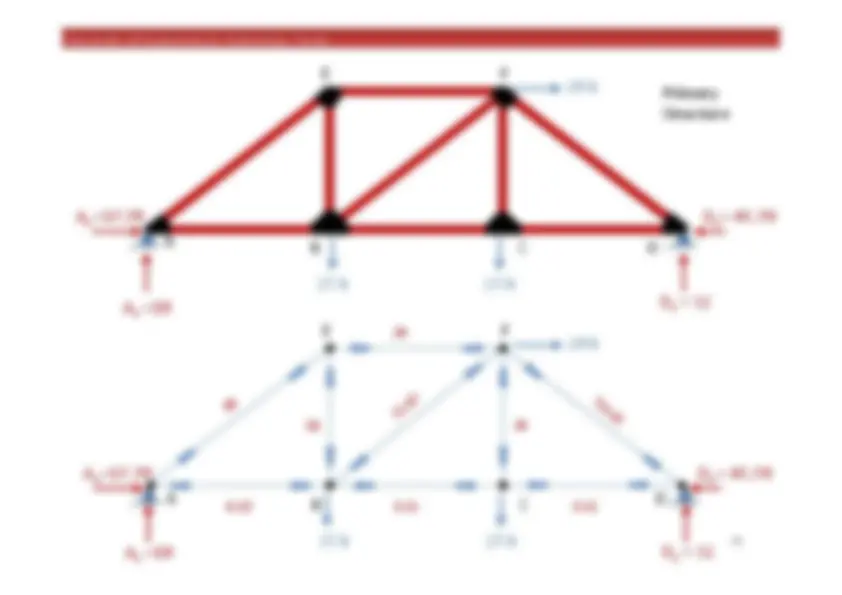
Solution
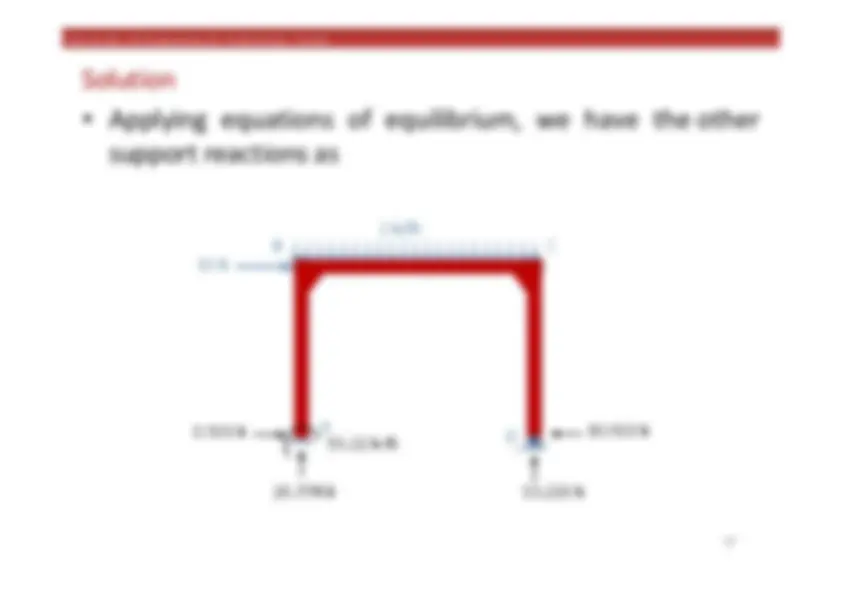
Equilibrium Condition
on the free body diagram of the frame in the
correct direction, and applying the equations of
equilibrium, we have
14
2.5 m
4 m
A
B
40 kN
2.5 m
B y
3.47 kN
A y
A x
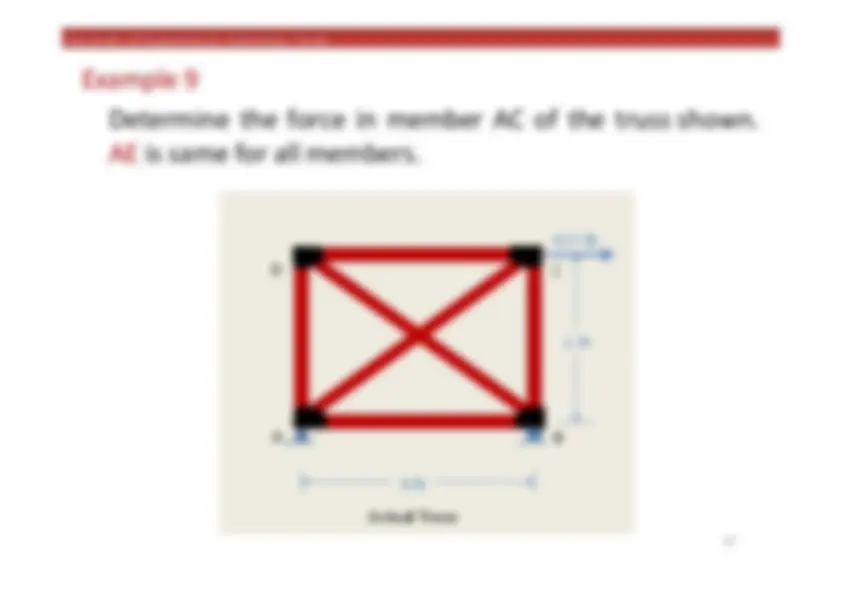
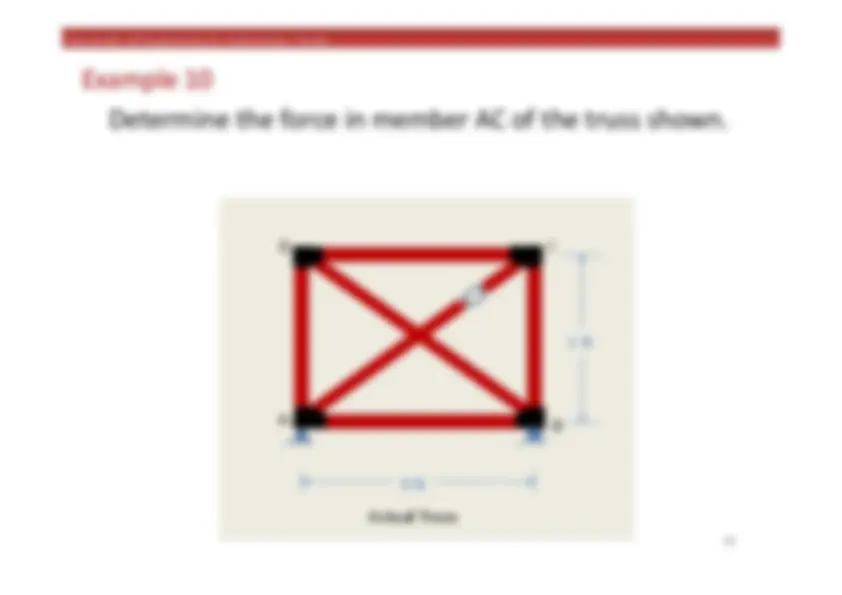
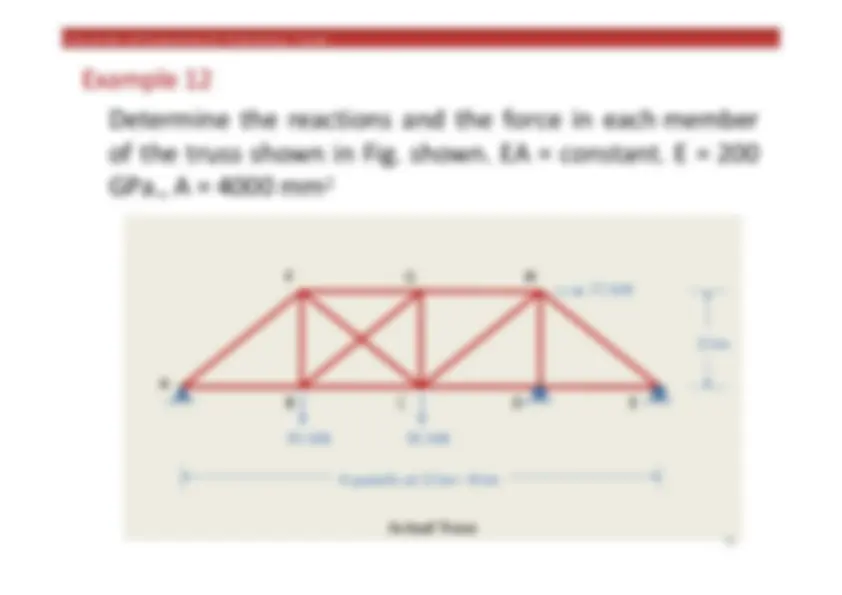
Example 7
Determine the moment at fixed support A for the frame
shown. EI is constant.
16
8 ft
A
B
Actual Frame
C
4 ft
3 ft
5 ft
100 lb/ft
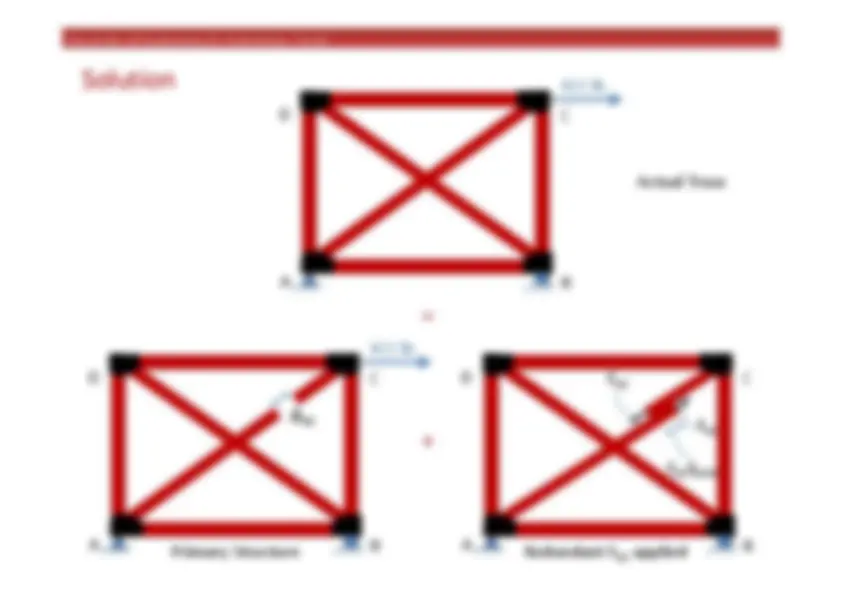
Solution
Principle of Superposition
degree. 17
8 ft
A
B
Actual Frame
C
4 ft
3 ft
5 ft
100 lb/ft
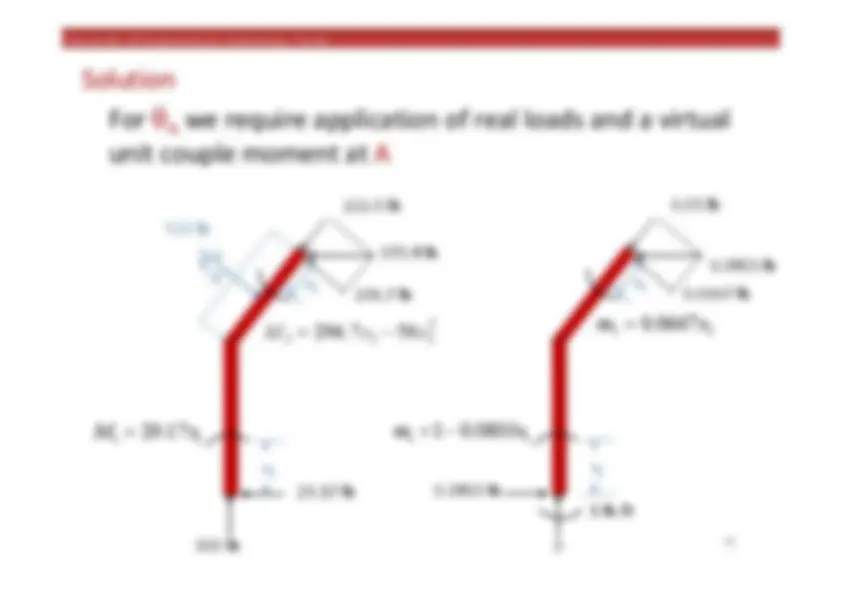
Solution
Compatibility Equation
Reference to point A
19
=
A
B
actual frame
C
100 lb/ft
A
B
primary structure
C
100 lb/ft
θ A
A
B
Redundant M A
applied
C
M A
α AA
M A
0 (1)
A A AA
Solution
Compatibility Equation
and α AA
will be computed using the method
of virtual work.
shown in figure.
20
0 (1)
A A AA