Download Minimum Mean Squared Error Estimation - Outline | STAT 322 and more Study notes Statistics in PDF only on Docsity!
MINIMUM MEAN SQUARED ERROR ESTIMATION
OUTLINE
Motivation for the estimation problem
Nonlinear MMSE estimation
Estimation based on several measurement
Linear MMSE estimation
Orthogonality Principle
Reading: Bertsekas & Tsitsiklis, 4. EE/STAT 322, #
MOTIVATION FOR ESTIMATION
There are many examples and applications of the estimation problem:
RADAR: estimation the location/speed of the target
Communications: estimation of signal frequency
Speech: recovering of the voice signal from the noisy signal
Weather reporting: estimation of tomorrow’s temperature
EE/STAT 322, #
ONE EXAMPLE
Estimating the value of a signal in noise:
Y
X
W
X, W, Y
are random variables.
X
is a random variable uniformly distributed between (0, 1)
W
is Gaussian RV with zero mean and variance
σ
W 2
W
and
X
are independent
We can observe
Y
, want to find a good estimate
X = g ( Y )
of
X
Y
could be the signal picked up by a microphone in a classroom with
background noise. EE/STAT 322, #
HOW DO WE DEFINE “GOOD”?
Many different criteria: least-squares, minimum mean-squared error, ...
All useful depending on the application/complexity ...
We will minimize the
mean squared error
(MSE)
E
[(
X
X
2 ]
We assume that we know the distribution of
X
and
X
Y
and hence the
joint distribution of
X
and
Y
EE/STAT 322, #
MMSE ESTIMATION: WITH OBSERVATION
Y
SETUP: There is a RV
X
whose value we don’t know.
There is another
RV
Y
, whose value we
know
Suppose we know the distribution of
X
Y
What is the best guess of
X
, given that
Y
y
, in the MMSE sense?
That is, want to find a function
X = g ( y )
such that we can minimize
J
MSE
E
[ (
X
g
( y
))
2 | Y = y ]
Any function of
y
is call an
estimator
. Some are good, some are bad. The
estimator
g
( y
)
that minimizes
J
is called the MMSE estimator.
The same reasoning as in the previous slide leads to
∂J
∂g
y
)
g
( y
) =
E
[
X | Y = y ]
EE/STAT 322, #
7
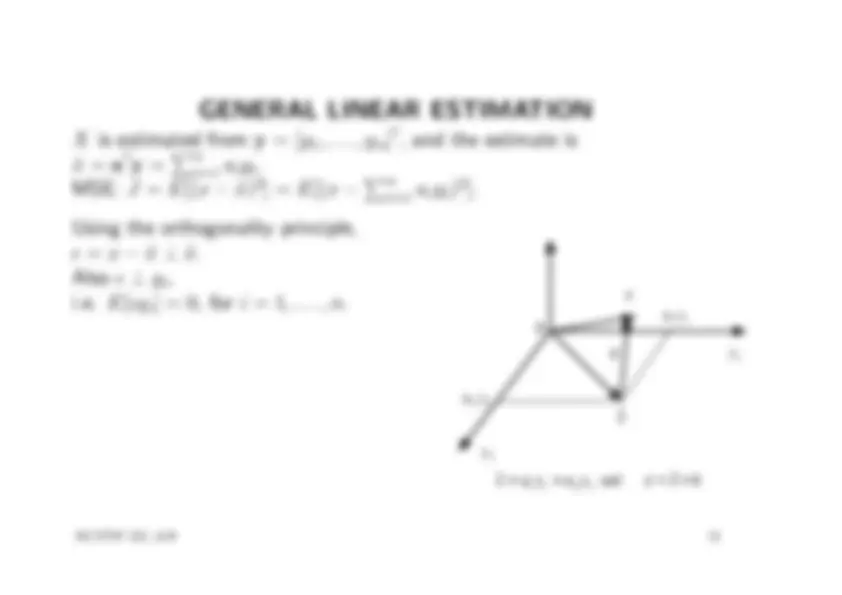
MMSE ESTIMATION BASED ON SEVERAL
MEASUREMENTS
SETUP: Given several measurements
Y
1 ,
Y
2 ,... , Y
n
,
want to find the
MMSE estimate of another RV
X
That is, find a function
g
( Y
1 , Y
2 ,... , Y
n
)
to minimize
E
[(
X − g ( Y 1
, Y
2 ,... , Y
n
))
2 | Y
1
y
1 , Y
2
y
2 ,... , Y
n
y
n
]
and hence
E
[(
X − g ( Y 1
, Y
2 ,... , Y
n
))
2 ]
The answer is similar: the MMSE estimator is given by
g
( Y
1 , Y
2 ,... , Y
n
) =
E [ X | Y 1
, Y
2 ,... , Y
n
]
EE/STAT 322, #
LINEAR MMSE ESTIMATION
well, but The nonlinear MMSE estimator based on several measurements performs
It requires the conditional distribution of
X
given
Y
i ’s
may be difficult to compute (or is in an ugly form)Even if we know the conditional distribution, the conditional expectation
Solution: Lower our standard and look for something simpler EE/STAT 322, #
LINEAR MMSE (CONT.)
form of The same idea as in general MMSE, except that we restrict the functional
g
(
...
to be linear; that is,
X
i n
a i Y i + b )
, and we want to
minimize
J
E
X
n
i ∑
a i Y i + b
2
The solution for
a
i ’s and
b
can be found out from the system of equations
∂J
∂a
j
, j
,... , n
, and
∂b ∂J
∂J
∂a
j
E
∂a
i ( X − ( n
i ∑
a i Y i + b
2
= E [ 2 ( X − ( n
i ∑
a i Y i + b
Y
j ]
EE/STAT 322, #
11
MATRIX FORM
The equations above can be expressed in a compact form, called
Yule-Walker
equations.
[
a
1 ,... , a
n ] R Y + b ¯
Y
R
XY
[
a
1 ,... , a
n
]
¯
Y
b
X
where
R
Y
E
[
YY
T
]
is the correlation matrix of vector
Y
= [
Y
1 ,... , Y
n
] T
,^
R given by
Y
R
Y
R
Y
R
Y
n
R
Y
R
Y
R
Y
n
R
Y
n
R
Y
R
Y
R
XY
E
[
X
Y
] = [
R
XY
R
XY
n
1)]
EE/STAT 322, #
13
ORTHOGONALITY PRINCIPLE
Homogeneous linear estimate of
X
X
aY
Nonhomogeneous linear estimate of
X
X
aY
b .
the estimation error
X
X
X
X
If
X
is the LMMSE estimate of
X
, then
E
X�
E
Y �
, i.e.,
X
(and
Y
) are uncorrelated with (orthogonal to)
Proof:
Consider a homogeneous case, and let
X
aY
da^ dJ
E
[(
X
aY
Y
] = 0
E
[
�Y
] = 0
We can also show
E
[
X
] =
E
[
�aY
] = 0
EE/STAT 322, #
SUMMARY OF PROPERTIES
Estimation error
is uncorrelated with estimate
X
E
[
X
] = 0
Estimation error
is uncorrelated with observation
Y
i :
E
[
�Y
i ] = 0
var
X
var
X
var
where var
X
σ
x 2
, var
X
ρ
XY 2
σ
x 2
, and
var
J
E
[(
X
X
2 ] = (
ρ
XY 2
σ
x 2
.
EE/STAT 322, #