Download Linear Minimum Mean Squared Error Multiuser Detection in ECE595: Multiuser Communications and more Study notes Electrical and Electronics Engineering in PDF only on Docsity!
ECE595: Multiuser Communications
ECE595: Multiuser Communications
Dr. Sudharman K. Jayaweera
Assistant Professor
Department of Electrical and Computer Engineering
University of New Mexico
Lecture 09 - November
st , Thursday
Fall 2007
ECE595: Multiuser Communications
Minimum Mean Squared Error Multiuser Detection
MMSE Estimation
Linear MMSE Estimation and Linear MMSE Multiuser Detection
Limiting Behavior of Linear MMSE
Other Optimality Properties of Linear MMSE Multiuser Detector
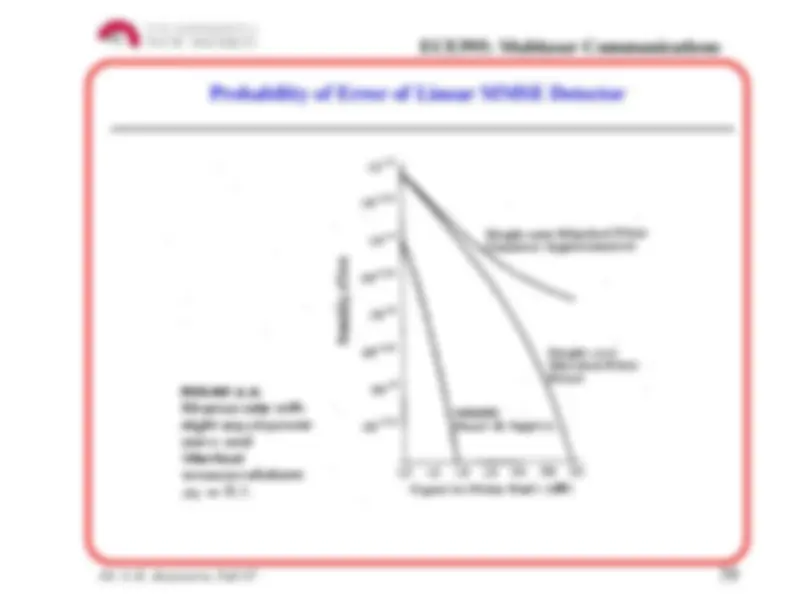
Error Probability of the Linear MMSE MUD
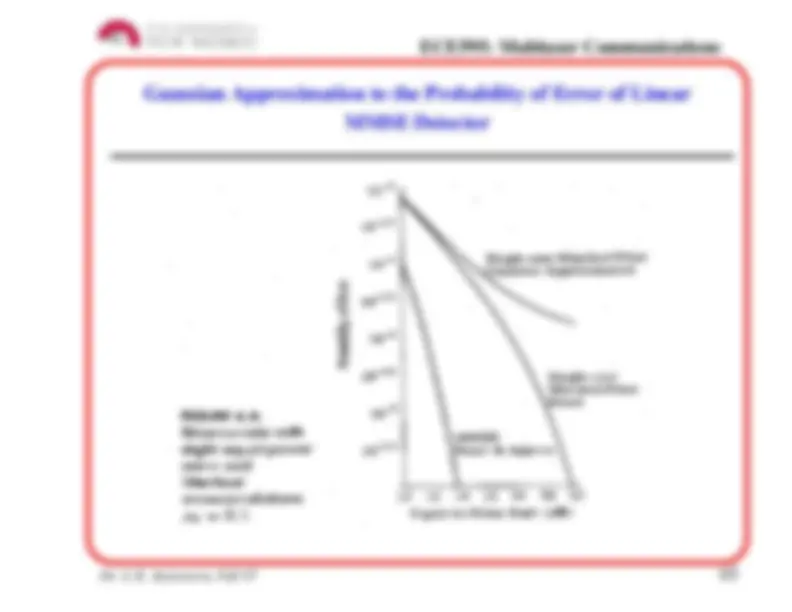
MUDGaussian Approximation to Error Probability of the Linear MMSE
ECE595: Multiuser Communications
Linear MMSE Estimation
The conditional mean estimator could be in general
non-linear in
the observation
y
Also, it might be hard to compute and/or implement
So, we may try to find the
best linear estimator
that minimizes the
mean squared error (MSE)
multiuser detector (Linear MMSE MUD)This leads to the so-called linear minimum mean squared error
ECE595: Multiuser Communications
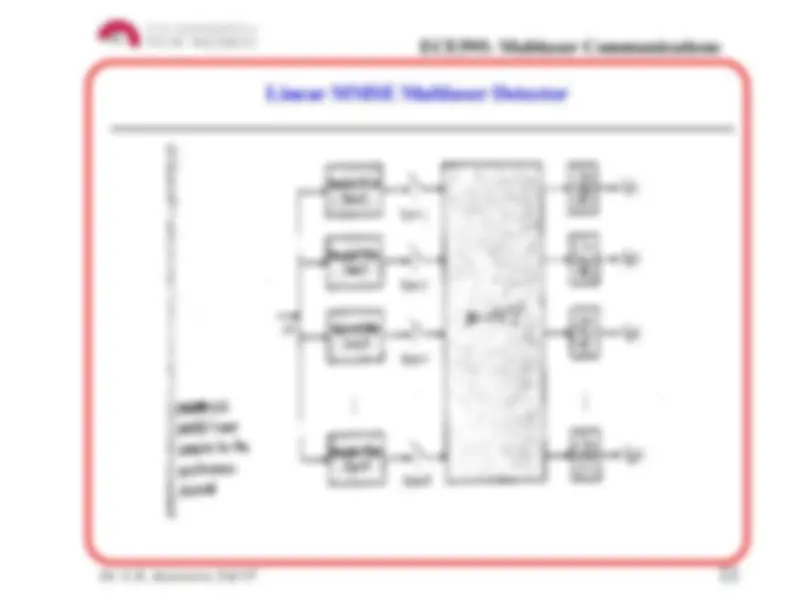
Linear Minimum Mean Squared Error Multiuser Detection
(Linear MMSE MUD)
Given the observation
r ( t ) , we want to apply a linear filter
m
k ( t )
so
that
m k ( t ) =
argmin
m k E { ( b k − < r ,
(^) m
k
) 2 }
where
r , (^) m
k > = Z 0 T r ( t ) m k ( t )
dt
(Note that the
E
is w.r.t both
n ( t )
and
b k )
Then the linear MMSE multiuser detector output for the
k -th user is:
bˆ
k
sgn
r , (^) m
k
)
ECE595: Multiuser Communications
Mean Squared Error (ctd...)
Then,
MSE
= E { ( b k − < r ,
(^) m
k
) 2 }
= E { ( b k − < r ,
(^) m
k s
(^) m
k 0 > ) 2 }
= E { ( b k − < r ,
(^) m
k s > − < r ,
(^) m
k 0 > ) 2 }
= E { ( b k − < r ,
(^) m
k s > ) 2 }
E
r , (^) m
k 0 > ) 2 }
− 2 E { ( b k − < r ,
(^) m
k s
)(
<
r , (^) m
k 0
) }
ECE595: Multiuser Communications
Mean Squared Error (ctd...)
E But,
{ ( b k − < r ,
(^) m
k s > ) < r ,
(^) m
k 0 > } = E { b k < r ,
(^) m
k 0
E
r , (^) m
k s
<
r , (^) m
k 0
= E { b k Z 0 T r ( t ) m k 0 ( t )
dt
E
{ Z 0 T r ( t ) m k s ( t )
dt
Z 0 T m k 0 ( t ′
r ( t ′ ) dt
′ }
= E { σ b k Z 0 T n ( t ) m k 0 ( t )
dt
E
{ Z 0 T r ( t ) m k s ( t )
dt
Z 0 T σ n ( t ′
) m k 0 ( t ′
dt
′ }
(since
r ( t ) =
K
j ∑
= 1 A
j^ b j^ s j^ ( t ) +
(^) σ
n ( t )
and
K
j ∑
= 1 A
j^ b
j^ s j^ ( t ) ) ⊥ m
k 0 (^) ( t ) )
= σ E { b k }
E
{ Z 0 T n ( t ) m k 0 ( t )
dt
= 0 − σ E { Z 0 T r ( t ) m k s ( t )
dt
Z 0 T n ( t ′
) m k 0 ( t ′
dt
′
= − E { Z 0 T r ( t ) m k s ( t )
dt
Z 0 T n ( t ′
) m k 0 ( t ′
dt
′ }
8
ECE595: Multiuser Communications
Mean Squared Error (ctd...)
∴ E { Z 0 T r ( t ) m k s ( t )
dt
Z 0 T n ( t ′
) m k 0 ( t ′
dt
′ }
= E { Z 0 T ( K
j ∑
= 1 A
j^ b
j^ s j^ ( t ) ) m k s ( t )
dt
} E { Z 0 T n ( t ′
) m k 0 ( t ′
dt
′ }
Z 0 T (^) Z
0 T E
(^) {
n ( t ) n ( t ′
m^
k s ( t ) m k 0 ( t ′
dtdt
′
Z 0 T (^) Z
0 T δ ( t −
(^) t ′ ) m k s ( t ) m k 0 ( t ′
dtdt
′
= Z 0 T m k s ( t ) m k 0 ( t )
dt
ECE595: Multiuser Communications
Mean Squared Error (ctd...)
Hence, from (9) and (10):
E { ( b k − < r ,
(^) m
k s > ) < r ,
(^) m
k 0 > } = 0
Similarly,
E { ( < r ,
(^) m
k 0 > ) 2 } = E { ( Z 0 T r ( t ) m k 0 ( t )
dt
2 }
E
( Z 0 T ( K
j ∑
= 1 A
j^ b j^ s j^ ( t ) +
(^) σ
n ( t ) ) m k 0 ( t )
dt
2
= E { ( Z 0 T σ n ( t ) m k 0 ( t )
dt
2 }
(since
m
k o (^) ( t ) ⊥
K
j ∑
= 1 A
j^ b
j^ s j^ ( t ) )
σ
2 E
{(
Z 0 T n ( t ) m k 0 ( t )
dt
Z 0 T n ( t ′ ) m k 0 ( t ′
dt
′ )}
ECE595: Multiuser Communications
General Form of the Linear MMSE Filter for MUD
m Hence, in order to minimize the MSE, it is enough to look for
k ( t ) =
m k s ( t )
(c.f. (7))
waveformsi.e. a waveform that is a linear combination of the signature
s 1 ( t ) ,
(^) s K (^) ( t )
Hence we can write,
m k ( t ) = K
j ∑
=
1
m
k ( (^) j ) s j^ ( t )
ECE595: Multiuser Communications
Linear MMSE MUD Output
Then, the linear MMSE filter output is: z k = Z 0 T m k ( t ) r ( t )
dt
K
j ∑
= 1 m
k ( (^) j ) Z 0 T r ( t ) s
j^ ( t ) dt
K
j ∑
= 1 m k ( j ) y
j^
m
k T y^
where we have defined
m
k
m
k ( 1 )
m
k ( 2 )
m
k ( K
)
matched filter outputsi.e. linear MMSE filter output is a weighted sum of a bank of
ECE595: Multiuser Communications
Optimal Linear MMSE MUD
From (4) and (14):
m
k
arg min
m
k ∈ R K (^) E
{‖
b k −
(^) m
k T y^ ‖ 2 }
Define the
K
×
K
matrix,
M
m
1 T
m
2 T
m
k T
ECE595: Multiuser Communications
Solution to Optimal Linear MMSE MUD Design
simultaneously for all the users:We can solve the linear MMSE multiuser detection problem
M
arg
min
M ∈ R K × K
E
b (^) −
(^) My
2 }
E Note that, (19) is true because
{‖
b (^) −
(^) My
2 }
E
b 1 (^) −
(^) m
1 T y^
b 2 (^) −
(^) m
2 T y^
b k −
(^) m
K T y^
2
K
j ∑
= 1 E
{‖
b
j^ −
(^) m
j^ T y^ ‖ 2 }
(recall from MMSE vector parameter estimation in ECE642)
17
ECE595: Multiuser Communications
Solution to Linear MMSE MUD (ctd...)
Then, for any
K
×
K
matrix
M
M
arg
min
M ∈ R K × K
tr
( I K
−
(^) ARM
T
−
(^) MRA
M
RA
2 R
(^) +
(^) σ
2 R
) M
T )^
arg
min
M ∈ R K × K
tr ( I K
−
ARM
T
−
(^) MRA
M
M
RA
2 R
(^) +
(^) σ
2 R
)(
M
M
M
RA
2 R
(^) +
(^) σ
2 R ) M T +
M
RA
2 R
(^) +
(^) σ
2 R ) M T −
M
RA
2 R
(^) +
(^) σ
2 R
) M
Let us set (arbitrarily),
M
RA
2 R
(^) +
(^) σ
2 R
)
AR
M
AR
RA
2 R
(^) +
(^) σ
2 R
) − 1
19
ECE595: Multiuser Communications
Solution to Linear MMSE MUD (ctd...)
M Then,
arg
min
M ∈ R K × K
tr
(
I K
−
M
RA
2 R
(^) +
(^) σ
2 R
) M
T
M
M
RA
2 R
(^) +
(^) σ
2 R
)(
M
Hence the minimum is achieved when
M
M
(since the matrix
RA
2 R
(^) +
(^) σ
2 R
)
is positive definite)
Hence, from (21), the linear MMSE transformation is:
M
AR
RA
2 R
(^) +
(^) σ
2 R ) − 1 = ( (
RA
2 R
(^) +
(^) σ
2 R
)(
AR
RA
2 R
(^) +
(^) σ
2 R ) R − 1 A − 1 ) − 1 = ( (
RA
2
(^) σ
2 I ) A − 1 ) −
R
(^) σ
2 A
− 2 ) A^
2 A − 1 ) − 1
= A − 1 ( R
(^) σ
2 A − 2 ) − 1
20