



Motion and Optical Flow
Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali
Farhadi
























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
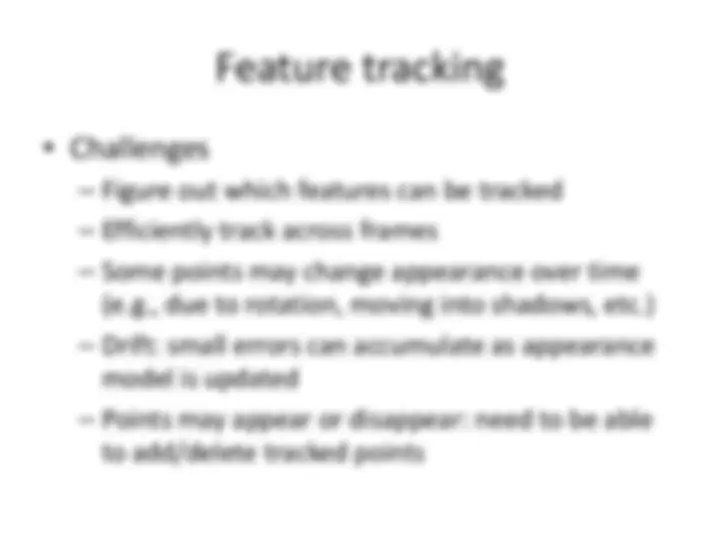
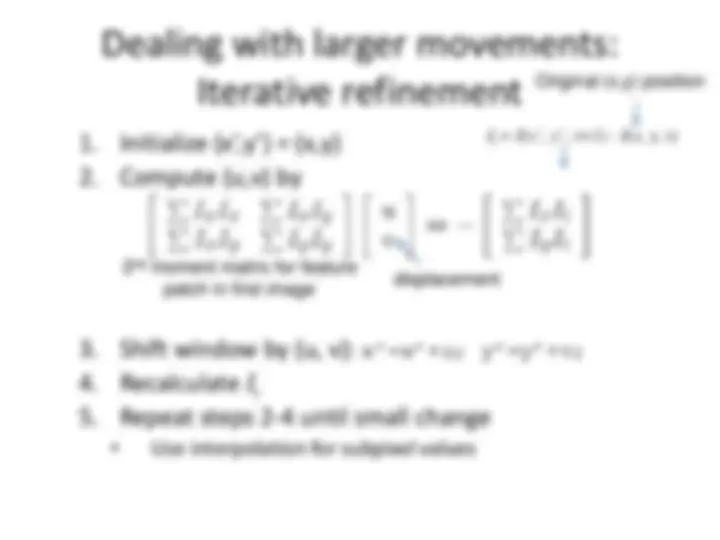
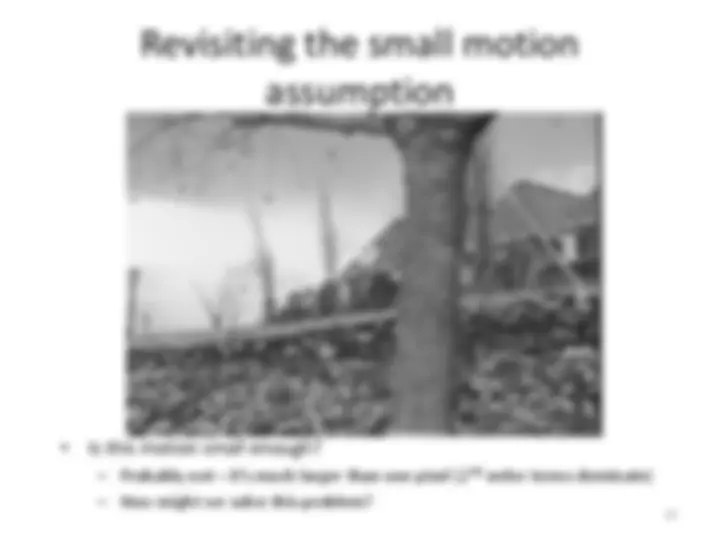
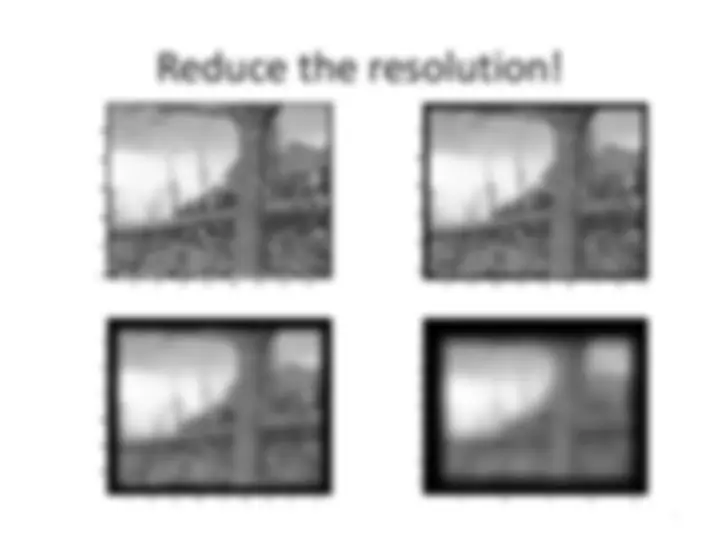
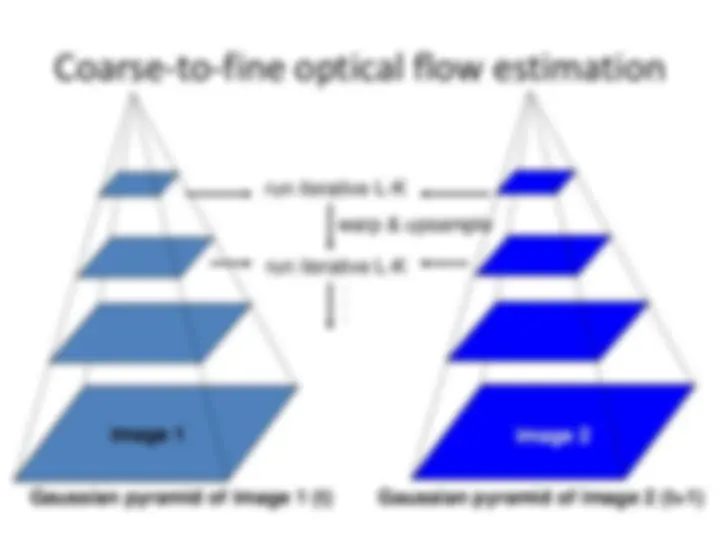
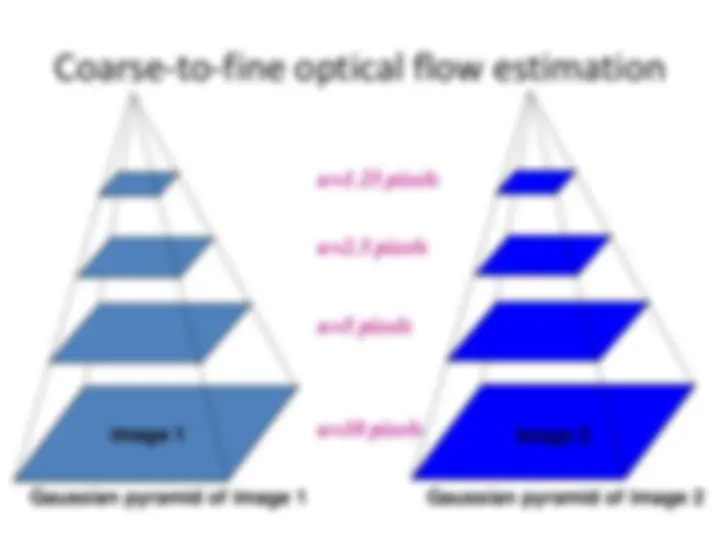
The importance of perceiving, understanding, and predicting motion in our daily lives. It explores the mechanism of seeing motion from a static picture and the cause of motion. The document also covers motion scenarios, feature tracking, the brightness constancy constraint, the aperture problem, and errors in Lukas-Kanade. The document ends with techniques for dealing with larger movements, such as iterative refinement and coarse-to-fine optical flow estimation.
Typology: Lecture notes
1 / 58

This page cannot be seen from the preview
Don't miss anything!
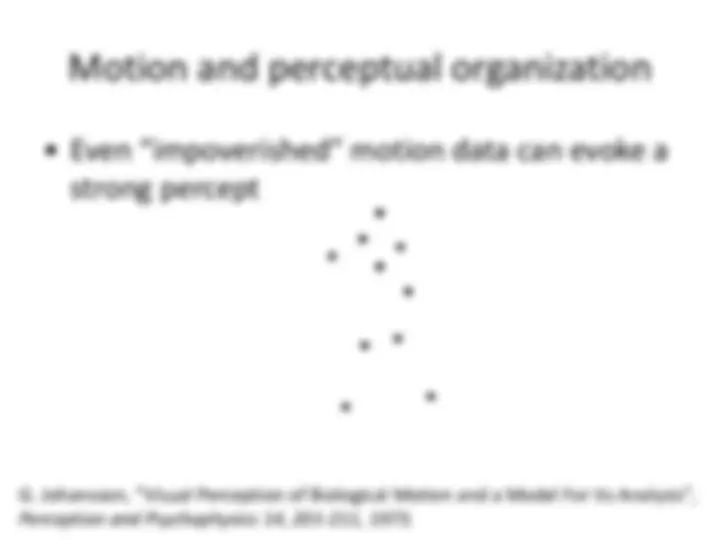
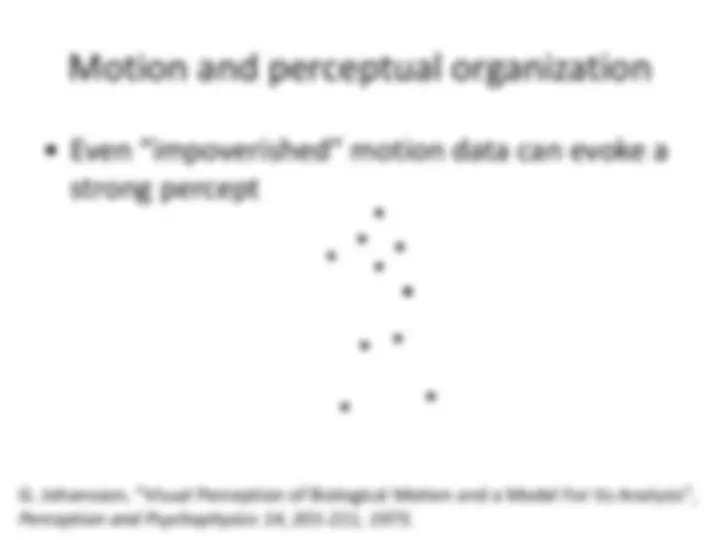
Slides from Ce Liu, Steve Seitz, Larry Zitnick, Ali Farhadi
G. Johansson, “Visual Perception of Biological Motion and a Model For Its Analysis", Perception and Psychophysics 14, 201-211, 1973.
http://www.ritsumei.ac.jp/~akitaoka/index-e.html
Static camera, moving scene Moving camera, static scene Moving camera, moving scene Static camera, moving scene, moving light
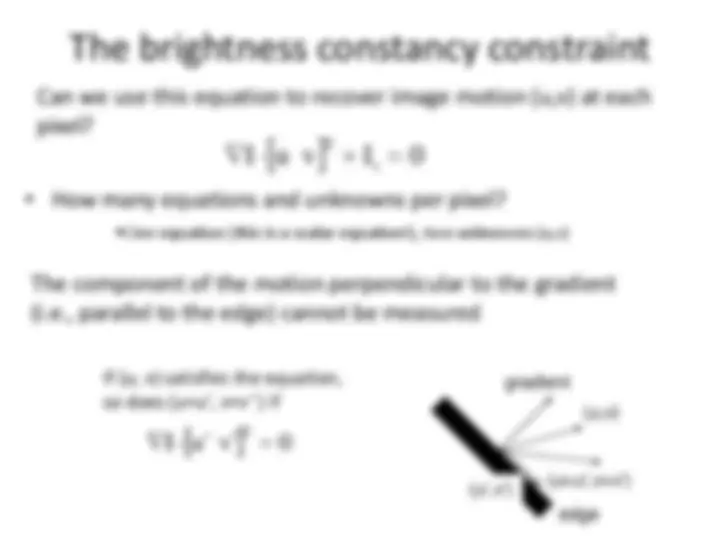
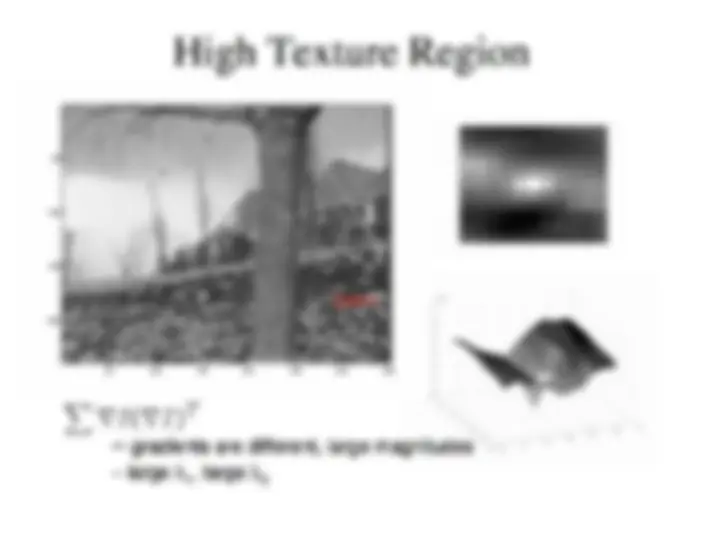
x y t I ( x + u , y + v , t + 1 ) ≈ I ( x , y , t )+ I ⋅ u + I ⋅ v + I
I ( x , y , t ) I ( x , y , t+1 )
x y t
Image derivative along x I [u v] I 0 t T
x y t I ( x + u , y + v , t + 1 )− I ( x , y , t ) = + I ⋅ u + I ⋅ v + I Difference over frames
Actual motion
Perceived motion