Download Multi-Grid Method - Advanced Device Simulation - Lecture Slides and more Slides Computer Science in PDF only on Docsity!
Multi-Grid Method
Complexity of linear solvers
2D 3D
Sparse Cholesky: O(n 1.5^ ) O(n^2 )
CG, exact arithmetic:
O(n^2 ) O(n^2 )
CG, no precond: O(n 1.5^ ) O(n 1.33^ )
CG, modified IC: O(n 1.25^ ) O(n 1.17^ )
CG, support trees: O(n 1.20^ ) -> O(n 1+^ ) O(n 1.75^ ) -> O(n 1.31^ )
Multigrid: O(n) O(n)
n 1/2^ n 1/
Time to solve model problem (Poisson’s equation) on regular mesh
Literature
= f(x)
- Poisson’s equation in 1D: ∂^2 u/∂x - 2 - - -1 2 - - -1 2 - - -1 2 - - -1
Multigrid Methods
- We studied several iterative methods
- Jacobi, SOR, Guass-Seidel, Red-Black variations, Conjugate Gradients (CG)
- All use sparse matrix-vector multiply (nearest neighbor communication on grid)
- Key problem with iterative methods is that:
- detail (short wavelength) is correct
- convergence controlled by coarse (long wavelength) structure
- In simple methods one needs of order N^2 iterations to get good results
- Ironically, one goes to large N (fine mesh) to get detail
- If all you wanted was coarse structure, a smaller mesh would be fine
- Basic idea in multigrid is key in many areas of science
- Solve a problem at multiple scales
- We get coarse structure from small N and fine detail from large N
- Good qualitative idea but how do we implement?
Slide source: Geoffrey Fox and (indirectly) Ulrich Ruede Docsity.com
Multigrid Overview
- Basic Algorithm:
- Replace problem on fine grid by an approximation on a coarser grid
- Solve the coarse grid problem approximately, and use the solution as a starting guess for the fine-grid problem, which is then iteratively updated
- Solve the coarse grid problem recursively, i.e. by using a still coarser grid approximation, etc.
- Success depends on coarse grid solution being a good approximation to the fine grid
Multigrid Sketch in 1D
- Consider a 2m^ +1 grid in 1D for simplicity
- Let P (i)^ be the problem of solving the discrete Poisson
equation on a 2i+1 grid in 1D
- Write linear system as T(i) * x(i) = b(i)
- P (m)^ , P (m-1)^ , … , P(1)^ is sequence of problems from finest
to coarsest
Multigrid Sketch in 2D
- Consider a 2m^ +1 by 2m^ +1 grid in 2D
- Let P (i)^ be the problem of solving the discrete Poisson
equation on a 2i+1 by 2i+1 grid in 2D
- Write linear system as T(i) * x(i) = b(i)
- P (m)^ , P (m-1)^ , … , P(1)^ is sequence of problems from finest
to coarsest
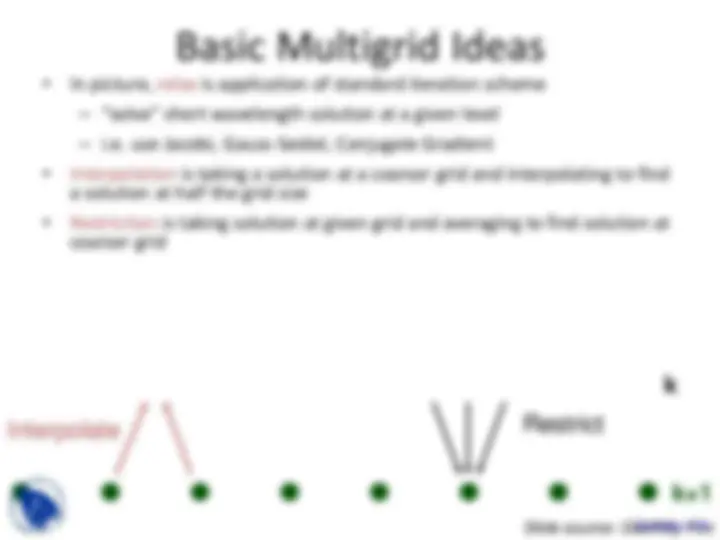
Basic Multigrid Ideas
- In picture, relax is application of standard iteration scheme
- “solve” short wavelength solution at a given level
- i.e. use Jacobi, Gauss-Seidel, Conjugate Gradient
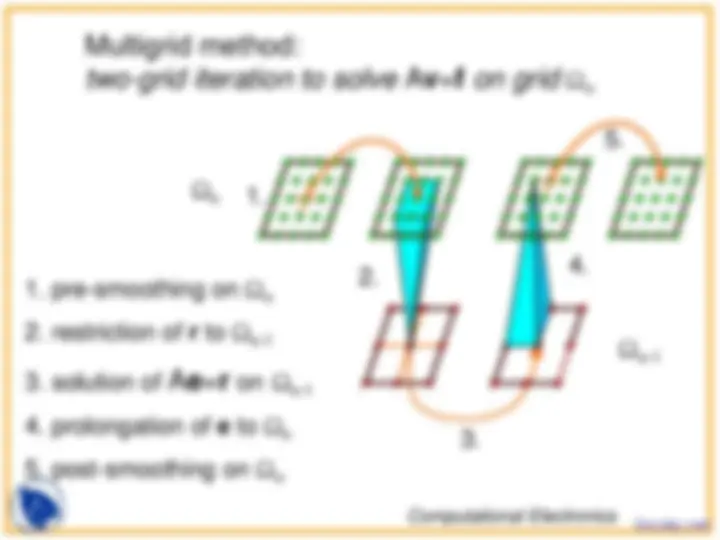
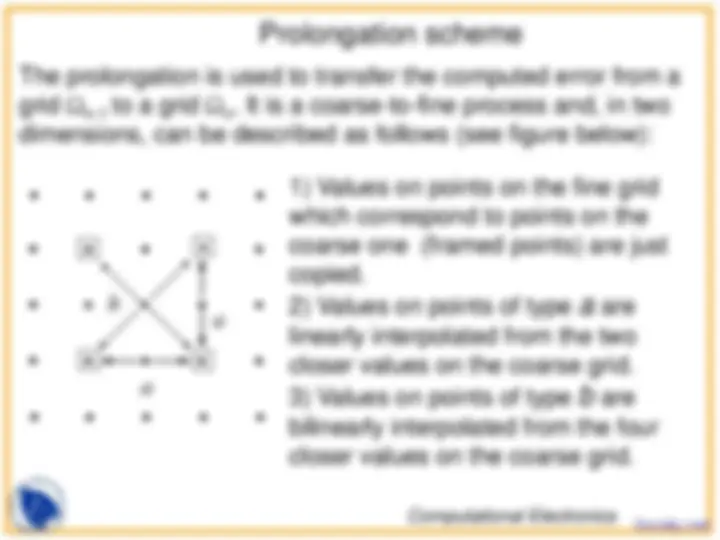
- Interpolation is taking a solution at a coarser grid and interpolating to find a solution at half the grid size
- Restriction is taking solution at given grid and averaging to find solution at coarser grid
k
k+
Interpolate Restrict
Slide source: Geoffrey Fox Docsity.com
Multigrid Operators
- For problem P(i)^ at varying coarsening levels (i, grid size grows with i):
- b(i) is the Right Hand Side (RHS) and
- x(i) is the current estimated solution
- All the following operators just average values on neighboring grid points (so information moves fast on coarse grids)
- The restriction operator R(i) maps P(i)^ to P(i-1)
- Restricts problem on fine grid P(i)^ to coarse grid P(i-1)
- Uses sampling or averaging
- b(i-1)= R(i) (b(i))
- The interpolation operator In(i-1) maps approx. solution x(i-1) to x(i)
- Interpolates solution on coarse grid P(i-1)^ to fine grid P(i)
- x(i) = In(i-1)(x(i-1))
- The solution operator S(i) takes P(i)^ and improves solution x(i)
- Uses “weighted” Jacobi or SOR on single level of grid
- x (^) improved (i) = S(i) (b(i), x(i))
- Overall algorithm, then details of operators
both live on grids of size 2 i-
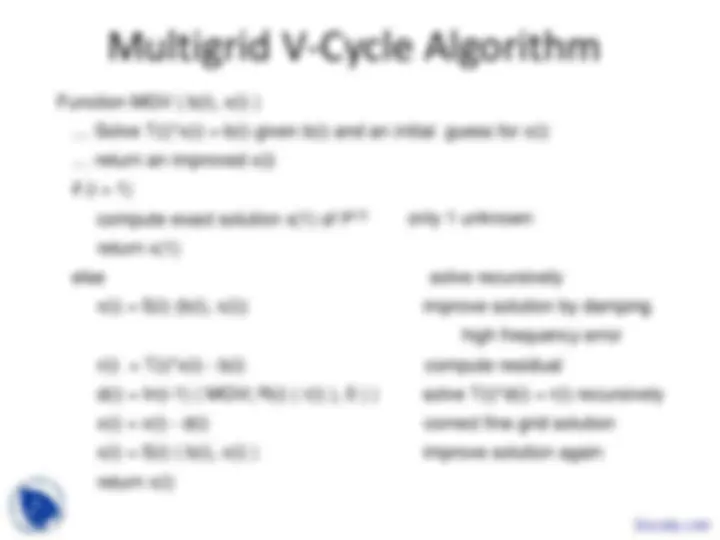
This is called a V-Cycle
• Just a picture of the call graph
• In time a V-cycle looks like the following
Multigrid Algorithm: procedure MG(level, A, u, f)
- if level = coarsest then
- solve coarsest grid equation by another method “exactly”
- else
- smooth Alevel^ u = f (m 1 times)
- Compute residual r = f - Alevel^ u
- Restrict F = R r ( R is Restriction Operator)
- Call MG( level + 1, A(level+1)^ , V, F) (m (^) c times)
- Interpolate v = P V (Interpolate new solution at this level)
- correct u (^) new = u + v
- smooth Au (^) new = f (m 2 times) and
- set u = u (^) new
- endif
- endprocedure A^
level (^) uexact = f
uexact = u + v A level^ v = r = f - Alevel^ u
Slide source: Geoffrey Fox Docsity.com
Elements of Multigrid
1 st^ observation towards multigrid
- Many relaxation schemes have the smoothing property: oscillatory error modes are quickly eliminated, while smooth modes are often very slow to disappear.
- In multigrid, this adversity is turned around: the idea is to use coarse grids to take advantage of smoothing.
Reason #1 Coarse Grids
Nested Iteration
Coarse grids can be used to compute an improved initial guess for the fine grid relaxation. This is advantageous because:
o Relaxation on the coarse-grid is much cheaper: half as many points in 1D, one-fourth in 2D, one- eight in 3D o Relaxation on the coarse grid is marginally faster