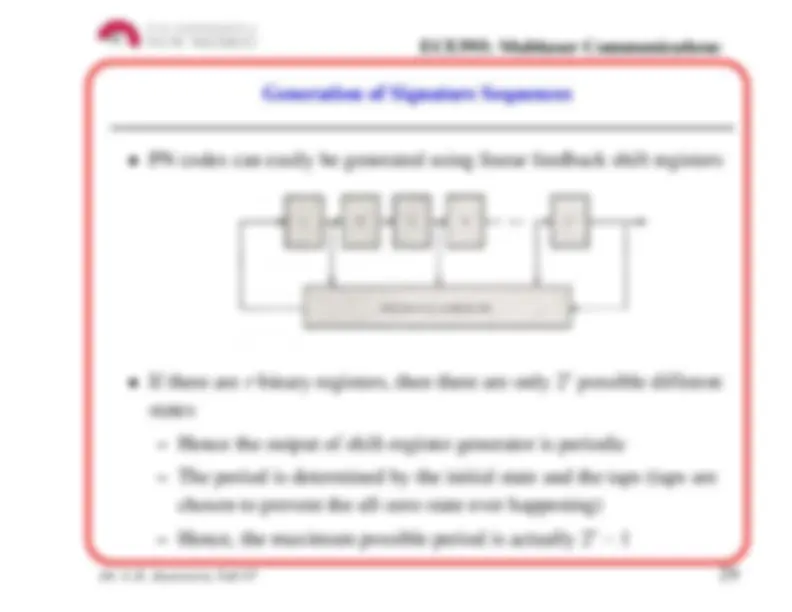
Download Multiuser Communications: Multiuser Detection and Equalization - Prof. Sudharman Jayaweera and more Study notes Electrical and Electronics Engineering in PDF only on Docsity!
ECE595: Multiuser Communications
ECE595: Multiuser Communications
Dr. Sudharman K. Jayaweera
Assistant Professor
Department of Electrical and Computer Engineering
University of New Mexico
Lecture 05 - September
th
, Tuesday
Fall 2007
ECE595: Multiuser Communications
Multiuser Detection and Equalization
Outline
Basics of Signal Detection and Estimation
A Signal Model for Multiple-access Channel
The Basic Problem of Data Detection
Conventional Detector for Multiple-access Channels
ECE595: Multiuser Communications
Basic Observation Model
r ( t ) = m ( t
(^) n
( t ) , 0 ≤ t ≤ T
r ( t ) : a received waveform, observed over
[
T
]
m
( t ) : a fixed (deterministic) waveform
n ( t ) : additive white Gaussian noise (AWGN):
- double-sided spectral density is- zero-mean
N 0
2
ECE595: Multiuser Communications
Basic Likelihood Formula
likelihood function Optimal statistical signal processing techniques are based on the
of observations, given fixed quantities
the scope of this course)function for the observations conditioned on fixed quantities (beyondThe likelihood function can be thought of as a probability density
In our model (1), the
fixed quantity
is the deterministic signal
m
( t )
Cameron-Martin formula and the log of the likelihood function is given by the so called
log
L
( { r ( t ) } ) = 2
N
0
[ Z
T
0 m ( t ) r ( t )
dt
Z
T
0
[
m
( t )]
2 dt^
]
ECE595: Multiuser Communications
Maximum-Likelihood (ML) Detection
Suppose we have
M
possible signals:
m 0 ( t ) ,
(^) m
1 ( t ) ,.. .,
(^) m
M − 1 ( t )
The idea of
maximum-likelihood
(ML) detection is to choose the
signal that makes observation
y
most likely:
jˆ
arg
max
0 ≤ (^) j ≤ M − 1 [ Z T
0
m
j^ ( t ) r ( t )
dt
Z
T
0
[
m
j^ ( t ) ] 2 dt
]
likelihood detection also minimizes theWhen signals are equally likely (equal priors), the maximum
probability of error
P
e :
P
e
P
jˆ 6 =
j )
ECE595: Multiuser Communications
Example (
M
): Binary Antipodal Signals (1/2)
Suppose that
m
( t )
is a known signalling waveform (e.g. BPSK), and
m 0 ( t ) = − m ( t )
and
m
1 ( t ) = +
m
( t ) ,
The observation model can be written as
r ( t )
bm
t ) +
(^) n
( t ) ,
where
b
is a binary antipodal digit (i.e.
b
=
The ML decision rule is:
bˆ
sgn
Z
T
0 m ( t ) r ( t )
dt
where
sgn
x }
algebraic sign of
x
ECE595: Multiuser Communications
Remarks on
M
-ary ML Detection
The raw complexity of
M
-ary detection is
O
M
Multiuser detection, for example, is
M
-ary detection with very large
M
K
-user (binary and synchronous) system
M
K
practical systemHence, the complexity of ML detection may be too much for a
Also, the determination of
P
e
becomes very difficult when
M
ECE595: Multiuser Communications
Basics of Estimation
Assume a continuum of possible signals for
m
( t ) :
m ( t ) = m
θθθ ( t )
for
θθθ
∈
R
m
There are several possible estimation (optimality) criteria:
Least Squares: (valid for
any
type of noise)
θˆ
argmin
θθθ ∈ Θ
Z
T
0
[
r ( t ) (^) −
(^) m
θ ( t )]
2 dt^
Maximum-likelihood estimation in AWGN: (same as least squares)
θˆ
argmax
θ ∈ Θ [ Z T
0 m θ ( t ) r ( t )
dt
Z
T
0 [ m θ ( t
)]
2 dt^
]
In general, ML estimator is given by the solution to the
likelihood
equation
ECE595: Multiuser Communications
Recursive Estimation (1/2)
intervals,Assume that observations are taken over a sequence of observation
i
θ ˆ ( i (^) +
θˆ ( i ) +
f i ({
r i ( t ) ; ˆ θ ( i ) })
for
i
where
-
r i ( t ) : set of observations in the
i -th observation interval
f i ({
r i ( t ) ; ˆ θ ( i ) })
: an update function (usually based on the
gradient of an error surface)
ECE595: Multiuser Communications
Recursive Estimation (2/2)
Assume that
m
θ ( t )
is linear in
θ
and that the error is measured
quadratically
Several commonly used recursive estimators:
-
Least Mean Squares (LMS):
f i ( . ; (^). )
uses a stochastic gradient
Recursive Least Squares (RLS):
f i ( . ; (^). )
uses an exact gradient
Kalman Filter:
f i ( . ; (^). )
uses an exact gradient
Assumes that
θ
changes with
i according to a linear dynamical
model
f i ( . ; (^). )
also incorporates the prior information provided by this
dynamical model
ECE595: Multiuser Communications
Wireless Multiple-access Channel Model
)
(
1 t
s
)
(
1 i
b
)
( (^1) t
h
)
(
1 t
x
)
(
2 t
s
)
(
2 i
b
)
(
2 t
h
)
(
2 t
x
)
( t
s K
)
( i
b K
)
( t
h K
)
( t
x K
)
( t
n
)
( t
r
)
(
1 t
s
)
(
1 i
b
)
( (^1) t
h
)
(
1 t
x
)
(
2 t
s
)
(
2 i
b
)
(
2 t
h
)
(
2 t
x
)
( t
s K
)
( i
b K
)
( t
h K
)
( t
x K
)
( t
n
)
( t
r
Note:
h
k ( t )
is the impulse response of the
k -th user’s channel
ECE595: Multiuser Communications
A Signal Model for Multiple-access Channel
Received signal:
r ( t ) = K
k ∑
= 1 B − 1
i= ∑
0 b k ( i )
(^) f k ( t −
(^) iT
(^) n
( t )
where
f k ( t ) = s k ( t )
(^) h
k ( t )
M
KB
possible data signals:
m b ( t ) = K
k ∑
=
1
B − 1
i= ∑
0 b k ( i )
(^) f k ( t −
(^) iT
ECE595: Multiuser Communications
Multiple-access Channel Terminology
K
number of active users
B
frame length
b k ( i )
i -th symbol of user
k
(we consider BPSK, for which
b k ( i ) ∈ {
b ( i )
K
-vector of symbols of all users at symbol time
i
b
KB
-vector of all symbols of all users for a frame
h k
channel impuls response for user
k
s k
transmit waveform of user
k
T
symbol period
n ( t )
AWGN with spectral height
σ
2
=
N 0
2
ECE595: Multiuser Communications
Basic Problem of Data detection
Estimate
b
or some subset of it
from the received signal
{ r ( t ) ;
∞ < t < ∞ }