Download Interaction Design Framework: Fluid Dynamics and Uncertainty and more Lecture notes Communication in PDF only on Docsity!
Negotiated Interaction
Iterative Inference and Feedback of Intention in HCI
Roderick Murray-Smith, John Williamson
Department of Computing Science,
University of Glasgow &
Hamilton Institute, NUI Maynooth
[email protected]
http://www.dcs.gla.ac.uk/~rod
http://www.dcs.gla.ac.uk/~rod/Videos.html Bayesian Research Kitchen, Grasmere, 7
th^
Sept 2008.
Negotiated interaction
-^
A new framework for interaction design could include:^ – Users interact with content, services and other users in
environment
- Actions and feedback can be continuous– User and system negotiate interactions and intentions in a
fluid, dynamic manner.
- Dancing metaphor, rather than command-and-control. Ebb
and flow of control, changing fluidly as context determines.
-^
Sharing the load^ – The interaction problem viewed as a negotiated control
process, where user and system work together tocommunicate intention.
- Timed, informative feedback shares the load between both
sides.
- This occurs at multiple time-scales
Interaction as closed-loop design •
The interface is a mechanism for controlling the flow of information froma system^ –
an interactive system has therefore to ascertain the intention of the userwith the minimal effort on the part of the user.
-^
The interaction is formulated as a continuous control process, wherethe system is constantly engaged in recursively updating a distribution(inference) over the potential intentions of a user while providingfeedback of the results back at a range of timescales, which users canthen compare with their goals.
-^
User and system attempt to negotiate a satisfactory interpretation of theuser’s intention.
Novel sensors and displays
-^
Wide variety of sensing and display technologies that can be used toconstruct the physical aspects of a human-computer interface.^ –
Rich sensors, from accelerometers, to smart clothing, to GPS units, topressure sensors etc, create the potential for whole new ways of interactingwith computational devices in a range of contexts.
-^
Each of these has different information capacities, noise properties, delays,frequency responses, and other modality-specific characteristics.
-^
Sensors will get cheaper, and new ones will create as yet unimaginedinteraction possibilities
-^
Building interfaces that make use of possibly
high-dimensional, noisy
,
intermittently available
senses to create usable communication media
is a challenge.
-^
We need general frameworks which are not tied to specific sensing ordisplay devices, but generalise to wider classes of devices.
Feedback Modes
The display is to provide the user with information needed toexercise control. i.e. predict consequences of controlalternatives, evaluate status and plan control actions, or betterunderstand consequences of recent actions.
-^
Basic feedback loops^ –
Visual, audio, vibrotactile display of states of phone, or of distantevents, people or systems.
-^
Modality scheduling^ –
Order of presentation of information in different feedback channels.
-^
Mobile context^ –
Disturbances, lower attention span, fragmentary/intermittentinteraction.
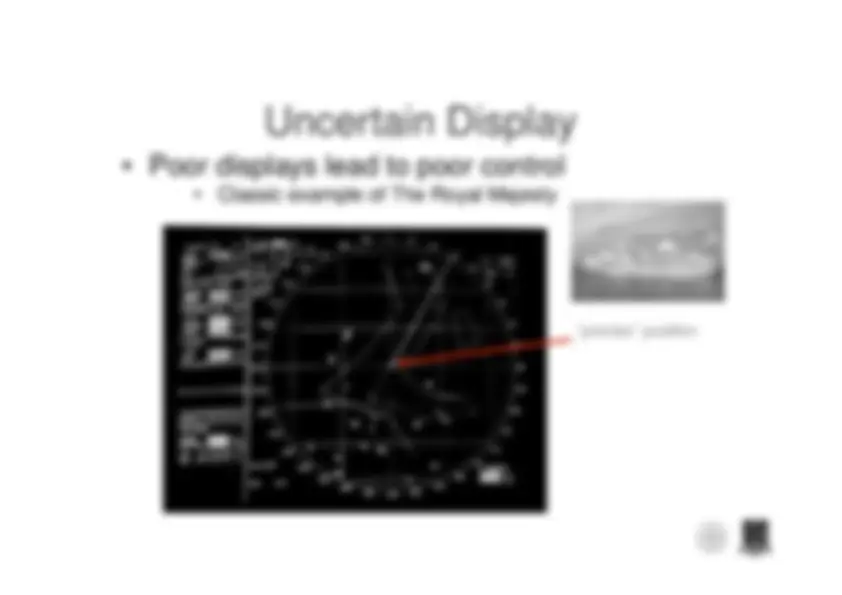
Uncertain Display
•^
Poor displays lead to poor control
•^
Classic example of The Royal Majesty
“precise” position
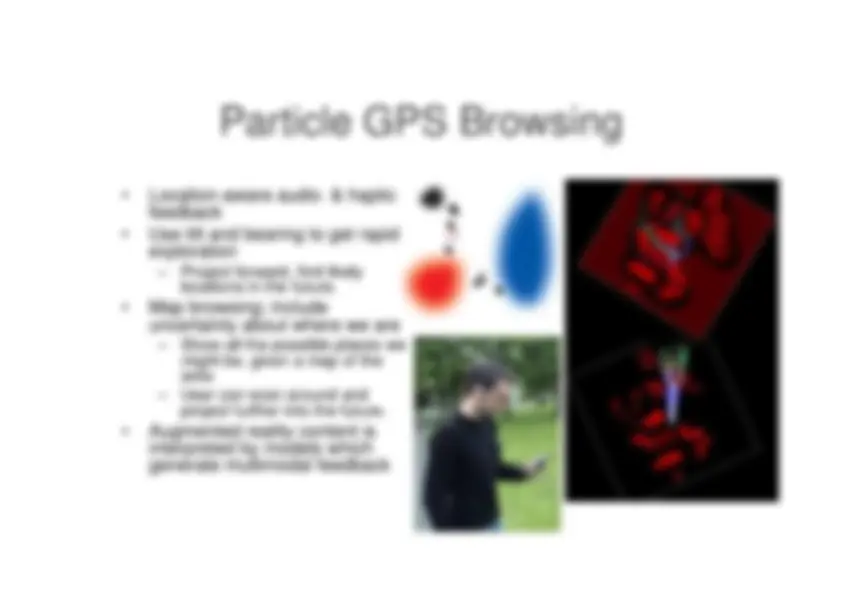
Particle GPS Browsing
-^
Location-aware audio & hapticfeedback
-^
Use tilt and bearing to get rapidexploration^ –
Project forward, find likelylocations in the future.
-^
Map browsing; includeuncertainty about where we are^ –
Show all the possible places wemight be, given a map of thearea
-^
User can scan around andproject further into the future.
-^
Augmented reality content isinterpreted by models whichgenerate multimodal feedback
Liquid representation of
interaction
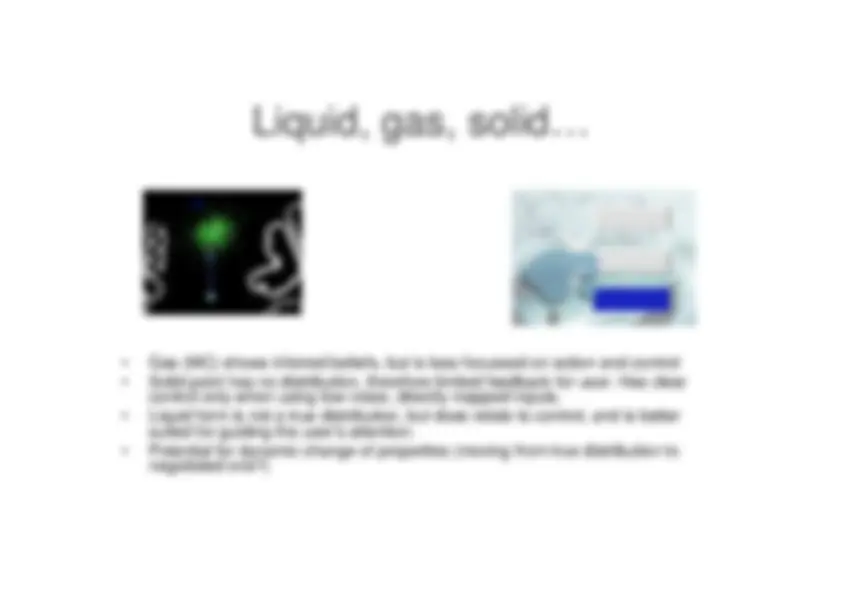
Liquid, gas, solid…
-^
Gas (MC) shows inferred beliefs, but is less focussed on action and control
-^
Solid point has no distribution, therefore limited feedback for user. Has clearcontrol only when using low-noise, directly mapped inputs.
-^
Liquid form is not a true distribution, but does relate to control, and is bettersuited for guiding the user’s attention.
-^
Potential for dynamic change of properties (moving from true distribution tonegotiated one?)
Start with Monte Carlo samplesAdd molecular dynamicsRender with isocontour tracing
Long range attractor
Short range replusion
Equilibrium of attraction and repulsion(with damping)
Particles exert forceon each other^ Gaussian on each sample
Render the isocontour
Liquid Cursor
Goal Spaces •
We focus on the problem of interaction with sensors producingcontinuously varying measurements.
-^
The interaction is a closed-loop control process and theultimate control variable is the distribution over actionablegoals.
-^
The purpose of the system is to perform recursive evidenceupdates to infer the new goal distribution, forming a trajectorythrough the space of distributions. The space in which thistrajectory lies is the goal space;
-^
For example, discrete selection:
p^1
...p
simplex in n
n -d space
-^
Inference (should) result in a smooth trajectory in this space
-^
Large steps in entropy are unnatural & error-prone
-^
Information rate determines smoothness
-^
Give feedback to user about progress through this space. Byavoiding discrete state changes as long as possible, the needfor after-the fact correction system such as
undo
can be
minimised.
Information and Smoothness
Constraints
•^
If a point
x
in the goal space is considered,
H
( x
n^
pi
log
p 2 i
is the Entropy at that point. The communication rate of thesystem is given by
dH
( x
)/ dt
•^
There is assumed to be a maximum potential communicationbit-rate
b
max
- the information capacity of the interacting muscle
group is one such upper bound, for example; the sampling rateof a sensor is another.
-^
If the process is to be controlled by the interactor, however, thebandwidth of the feedback must also lie within the user’s ability,as otherwise the interaction will be unpredictably unstable.
-^
So
b
max
= min(
bmaxin
, b
maxout
b
max
enforces a smoothness
constraint on the goal space trajectories; since
dH
( x
)/ dt
b
max
Link between display and goal
spaces
•^
Liquid cursor is 2-D as in existing pointing techniques
-^
Dynamic properties allow gestures to be recognised.
-^
Multiple hypotheses can be maintained until sufficient evidenceis provided to effect an action
-^
System and user share a model of the distribution over targets
Adapting the fluid dynamics
•^
Liquid viscosity can be varied according toderivative of entropy of intentioninterpretations.
•^
Have multi-component liquids with differentviscosities associated with different time-scales.