



Docsity.com








Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Dr. Nasir M Mirza delivered this lecture at Pakistan Institute of Engineering and Applied Sciences, Islamabad (PIEAS) to cover following points of Modeling and Simulation course: Non-Linear, Models, Dynamics, Pendulum, Simple, Visualization, Phase, Space, Undamped, Motion
Typology: Lecture notes
1 / 16

This page cannot be seen from the preview
Don't miss anything!
Non-Linear Models
2 2
-sin x dt
d x 2
2
A Simple Pendulum
Solution: STEP 1: Use Newton's Second Law to find the equation of motion, or model the abstract form of the system: a = F(t, x, v), STEP 2: Choose the initial conditions, x 0 & v 0 ; choose maximum time scale for simulation ( tmax ). STEP 3: Decide on the step size h. STEP 4: Begin a loop. Execute the loop while the time is less than tmax. STEP 5: Plot (t, x) or make a portrait by plotting (x, v). STEP 6: Calculate k 1 , k 2 , k 3 , and k 4 from the Runge-Kutta formulas, and use them to update x: x (^) i 1 xi x STEP 7: Update v with the Runge-Kutta formulas: v (^) i 1 vi v STEP 8: Increment the time: t = t + h. STEP 9: End of STEP4 and then Stop. You may also write a program in language of your choice to implement the algorithm. Use this for h = 0.05, x 0 = 1 , and v 0 = - 0.4 ; here the domain is [0, 25], and the range is [-2, 2]. Also try a different set of initial conditions; say
Example 8.1: Algorithm for Motion of a Pendulum Outline a simulation algorithm for the equation of a pendulum in an undamped system. The initial conditions are given for the position and velocity.
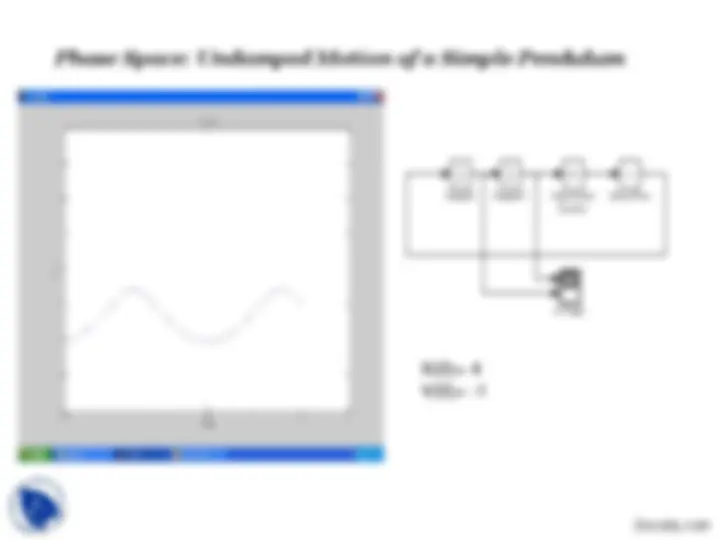
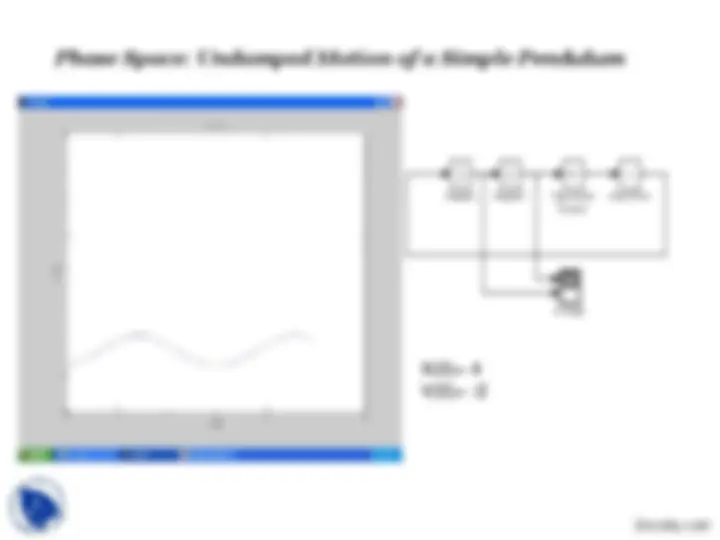
Phase Space: Undamped Motion of a Simple Pendulum
Let us construct the phase curves of the simple pendulum without any damping and driving force. It will be useful to make a phase portrait using a variety of initial conditions. To do this we will start the pendulum at x = 0 , but we will give it various velocities corresponding to various kinetic energies. The results are shown in Figure below.
Fig. 8.1 The angular velocity v (radians per second) as a function of displacement x (radians) for an undamped simple pendulum.
Let us allow velocity range to be from -3 to 3 in steps of 0.5 and domain is given by [ -3p, 3p ]. We can modify the initial conditions to get a set of concentric ellipses centered on points (2np, 0). The point in phase space (0, 0) phase space (0, 0) and the set of points ( 2np, 0), where n is an integer are points of stable equilibrium for the simple pendulum; the pendulum is hanging down from the pivot. The set of points [(2n - 1)p, 0] are points of unstable equilibrium; the pendulum is " standing " on its pivot.
XY Graph
-u Unary Minus
sin Trigonometric Function
(^1) s Integrator
(^1) s Integrator
XY Graph
-u Unary Minus
sin Trigonometric Function
(^1) s Integrator
(^1) s Integrator
XY Graph
-u Unary Minus
sin Trigonometric Function
(^1) s Integrator
(^1) s Integrator
XY Graph
-u Unary Minus
sin Trigonometric Function
(^1) s Integrator
(^1) s Integrator
XY Graph
-u Unary Minus
sin Trigonometric Function
(^1) s Integrator
(^1) s Integrator