



Simulation of Nonlinear Models
Dr. Nasir M Mirza
Computational Physics
Computational Physics
Email: [email protected]
Docsity.com






Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Information on the simulation of nonlinear models, specifically the pendulum and lorentz attractors. It includes the mathematical equations, major features of the models, and simulation results. The document also discusses the concepts of fixed points, limit cycles, and strange attractors.
Typology: Slides
1 / 33

This page cannot be seen from the preview
Don't miss anything!
Email:
Docsity.com
m
is attached to a rigid rod and the mass is at distance
from the
frictionless pivot. The system moves in a plane. The motion of is governed bythe equation for torque:
2 2
2
θ
θ =
2
Docsity.com
2
2
2 2
θ
θ
Major features of the mathematical model:
' 0
'
θ
θ
θ
Here Dependent and independent variable are y and t; Order:
Linearity:
It is a nonlinear equation as it has no product terms.
Homogeneity:
It is homogeneous equation with no force term
Conditions:
Initial conditions are given.
Coefficients:
There are constant coefficients.
Model Equation Type:
It is a single ordinary differential eq. based model.
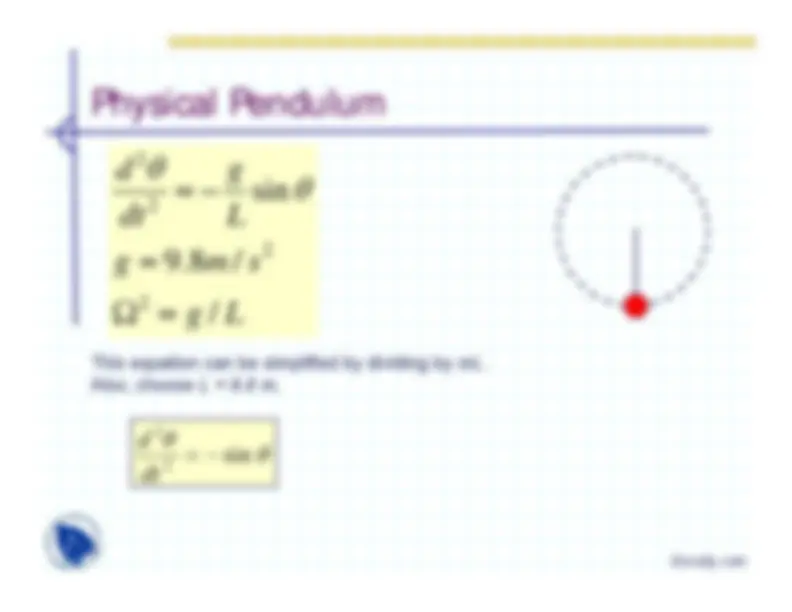
Example 1: Undamped System of Simple Pendulum
θ
m
Docsity.com
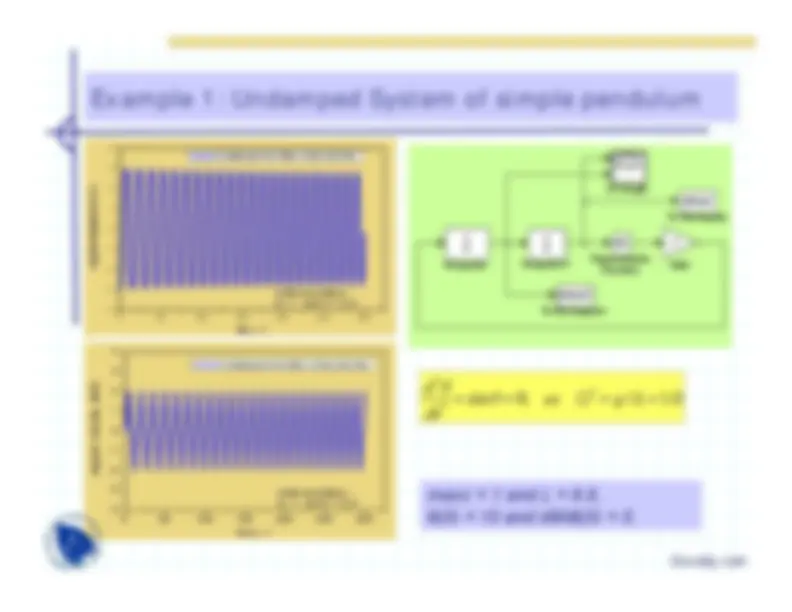
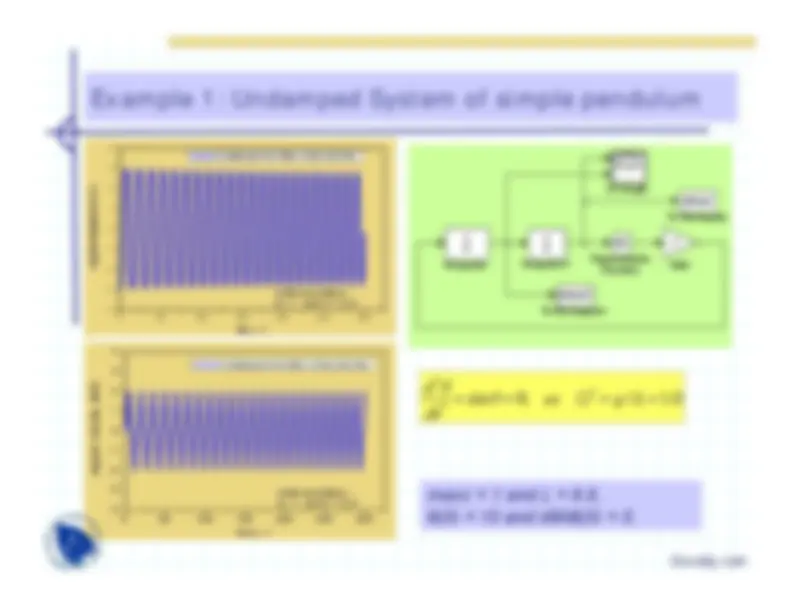
mass = 1 and L = 9.8, θ
(0) = 10 and d
θ
/dt(0) = 0.
Example 1: Undamped System of simple pendulum
0
5 0
1 0 0
1 5 0
2 0 0
2 5 0
3 0 0
(^43210) - 1 - 2 - 3 - 4
θ angular displacement,
tim e , t
u n d a m p e d m o tio n o f p e n d u lu m
in itia l c o n d itio n s : θ = − 3.
a n d
θ ' = 0.
XY Graph
sin
Trigonometric
Function
simout
To Workspace
simout
To Workspace
1 s
Integrator
1 s
Integrator
-1 Gain
0
5 0
1 0 0
1 5 0
2 0 0
2 5 0
3 0 0
-1 -2 -3 - 4 3 2 1 0
dtθ/ angular velocity, d
tim e , t
u n d a m p e d m o tio n o f p e n d u lu m
in itia l c o n d itio n s : θ = − 3.
a n d
θ ' = 0.
sin
2
2 2
g
as
d dt
θ
θ
Docsity.com
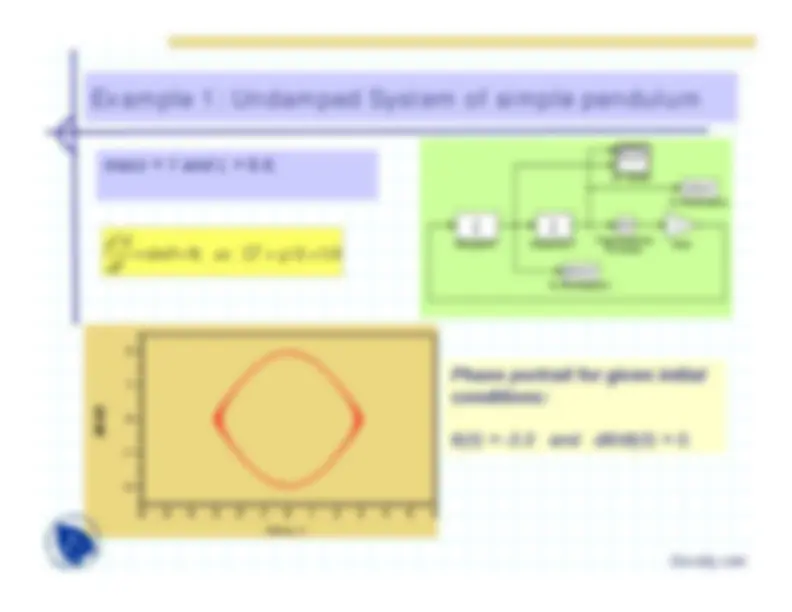
mass = 1 and L = 9.8,
Example 1: Undamped System of simple pendulum
0 . 1
/
; 0
sin
2
2 2
=
=
Ω
=
L
g
as
d dt
θ
θ
XY Graph
sin
Trigonome tric
Function
simout
To Workspace 1
simout
To Workspace
1 s
Integrator
1 s
Inte grator
-1 Gain
0
1
2
3
4
5
6
3 2 1 0
/dtθd
t im e , t
Phase portrait for given initialconditions: θ
and
d
θ
/dt(0) = 0.
Docsity.com
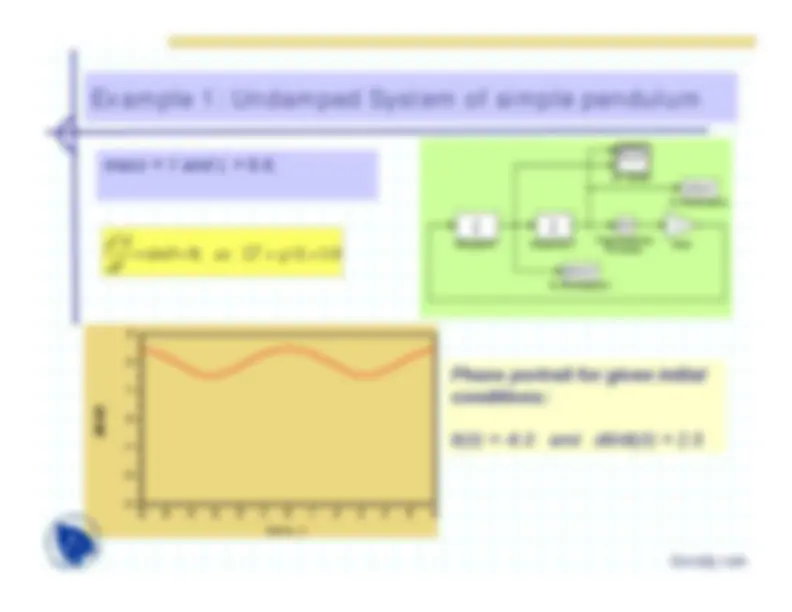
mass = 1 and L = 9.8,
Example 1: Undamped System of simple pendulum
0 . 1
/
; 0
sin
2
2 2
=
=
Ω
=
L
g
as
d dt
θ
θ
XY Graph
sin
Trigonome tric
Function
simout
To Workspace 1
simout
To Workspace
1 s
Integrator
1 s
Inte grator
-1 Gain
0
1
2
3
4
5
6
2 1 0
/dtθd
t im e , t
Phase portrait for given initialconditions: θ
and
d
θ
/dt(0) = 0.
Docsity.com
Example 1: Undamped System of simple pendulum
; 0
sin
2 2
=
θ
θ
d^ dt
Phase portrait for various initial conditions:
Docsity.com
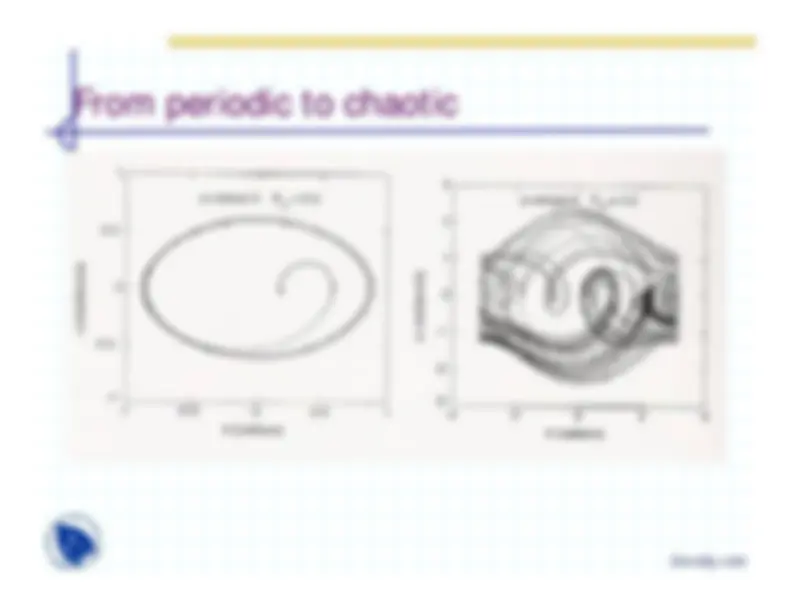
Phase space can have
fixed points
(x, v)
such that they satisfy the
model (as
f(x, v) = 0
and
g(x, v) = 0).
This corresponds to steady state.
The set of points in the phase space are identified as
orbit or trajectory
If the set of points in the simulation repeat itself after some time
then the orbit is said to be
periodic
that is
x(t + T) = x(t)
. The orbit of
mass-spring system in a friction free environment is an ellipse in phasespace. A closed curve is called a
limit cycle
in phase space towards which an
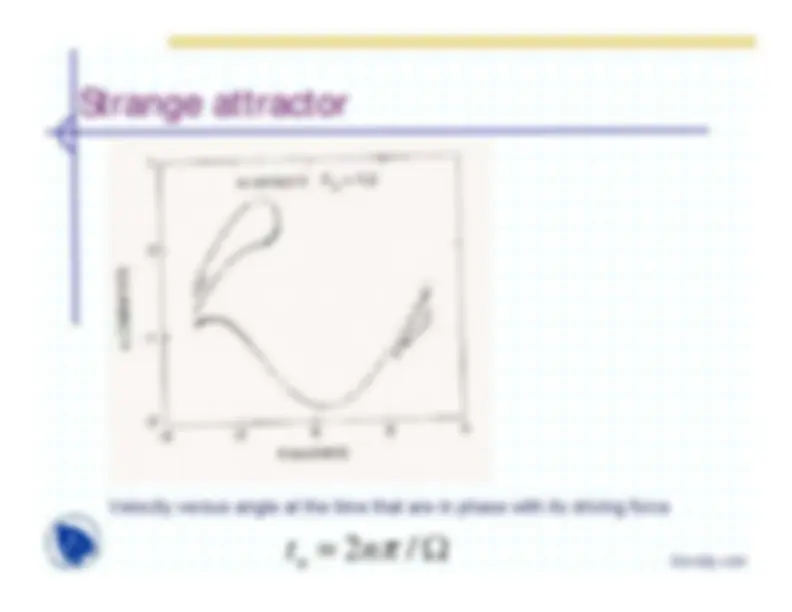
orbit evolves as time goes to large values. It has property that all othercurves move towards it or away from it. When all the neighboring trajectories are going towards the limit cycle it iscalled a stable or
attracting cycle
, otherwise it is an unstable or repelling
one.
Then orbit is called attractor.
Docsity.com
came across three-dimensional
nonlinear system which showed exotic behaviors. The model equations are
σ
) ( ) ( ) ( t z b t y t x
dz dt
−
=
Where
r
& b
are constants. These equations are found in number of
processes including motion of water wheel, lasers, dynamos and simpleconvection part of models for atmosphere. Lorentz
simulated three-dimensional trajectories for above system and
found that trajectory is a set of complicated shape and its not fixed points orlimit cycles.
Docsity.com
σ
) ( ) ( ) ( t z b t y t x
dz dt
−
=
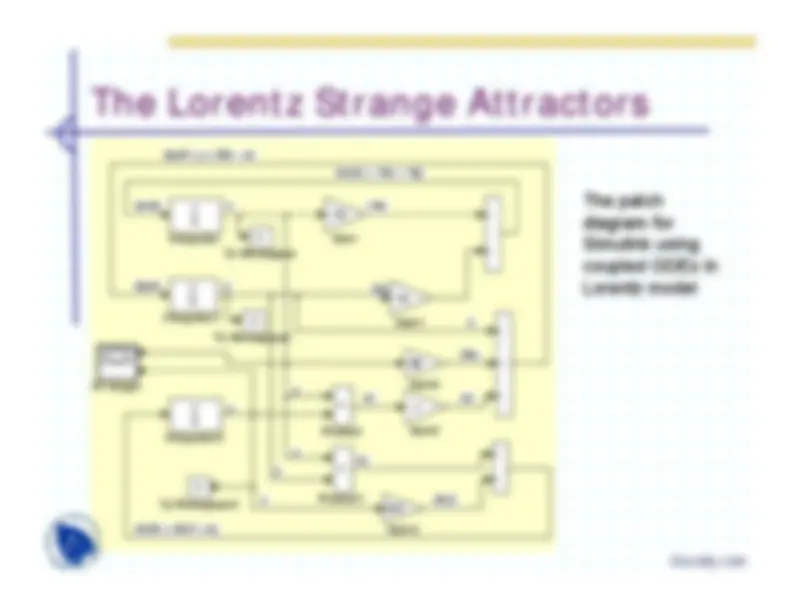
Let us use Simulink
for coupled ODEs
and trace the projection on xz-plane
with parameter values,
b
= 10, and
r
= 28. The initial values are
x(0)
y(0)
= 5., and
z(0)
= 25. The resulting solutions are illustrated as
Figures.
Docsity.com
Phase portrait forthe coupled ODEs in Lorentz
model
0
5
10
15
20
5 50 45 40 35 30 25 20 15 10
z
x
Lorentz nonlinear model
Docsity.com
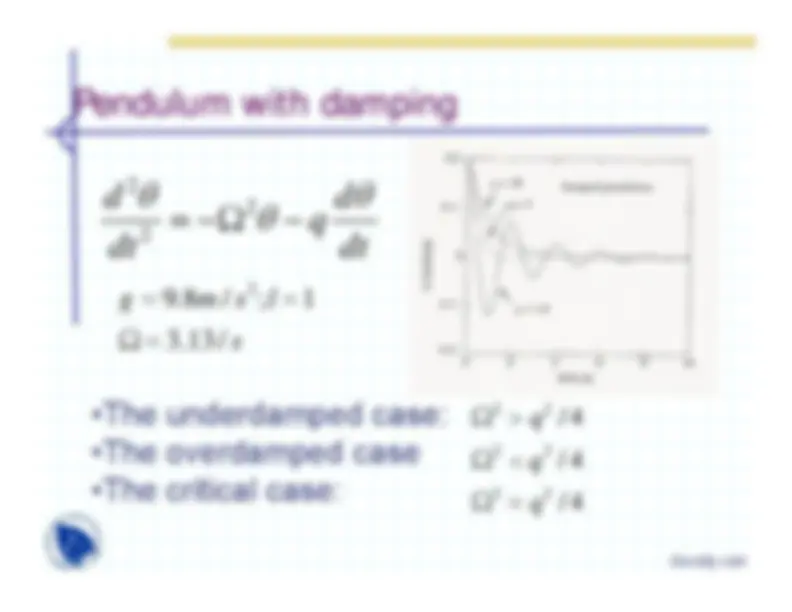
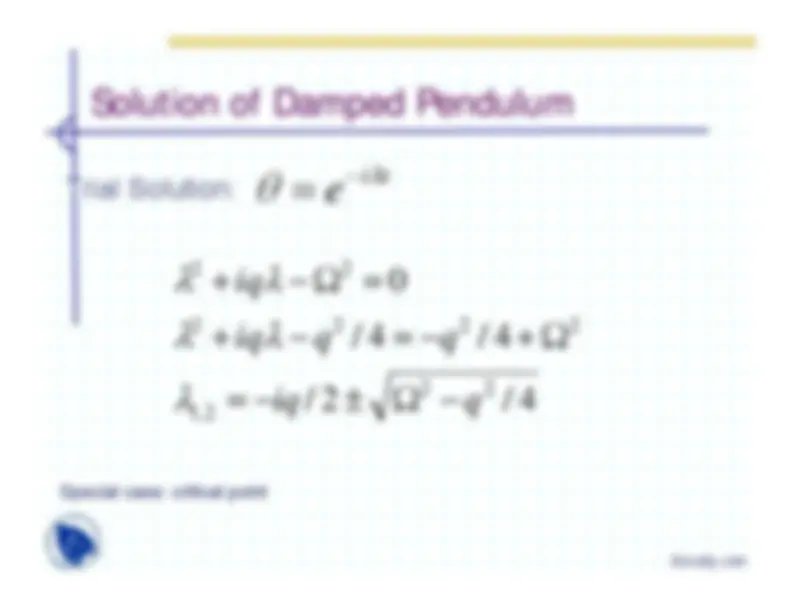
dt d
C
dt d
θ
θ
θ
−
−
=
sin
2
2
Docsity.com
mass = 1 and L = 9.8, θ
(0) = 10 and d
θ
/dt(0) = 0.
Example 1: Undamped System of simple pendulum
0
5 0
1 0 0
1 5 0
2 0 0
2 5 0
3 0 0
(^43210) - 1 - 2 - 3 - 4
θ angular displacement,
tim e , t
u n d a m p e d m o tio n o f p e n d u lu m
in itia l c o n d itio n s : θ = − 3.
a n d
θ ' = 0.
XY Graph
sin
Trigonometric
Function
simout
To Workspace
simout
To Workspace
1 s
Integrator
1 s
Integrator
-1 Gain
0
5 0
1 0 0
1 5 0
2 0 0
2 5 0
3 0 0
-1 -2 -3 - 4 3 2 1 0
dtθ/ angular velocity, d
tim e , t
u n d a m p e d m o tio n o f p e n d u lu m
in itia l c o n d itio n s : θ = − 3.
a n d
θ ' = 0.
sin
2
2 2
g
as
d dt
θ
θ
Docsity.com
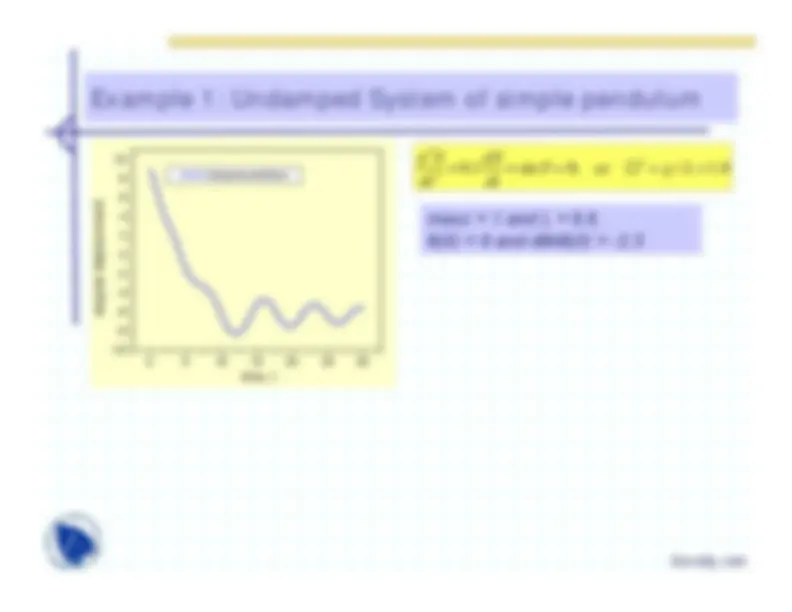
mass = 1 and L = 9.8, θ
(0) = 9 and d
θ
/dt(0) = -2.
Example 1: Undamped System of simple pendulum
0 . 1
/
; 0
sin
1 . 0
2
2 2
= = Ω = + +
L
g
as
d dt
d dt
θ
θ
θ
0
5
10
15
20
25
30
10 8 6 4 2 0 -2 -4 -6 - angular displacement
time, t
damped pendulum
Docsity.com