


Data Structures and Algorithms
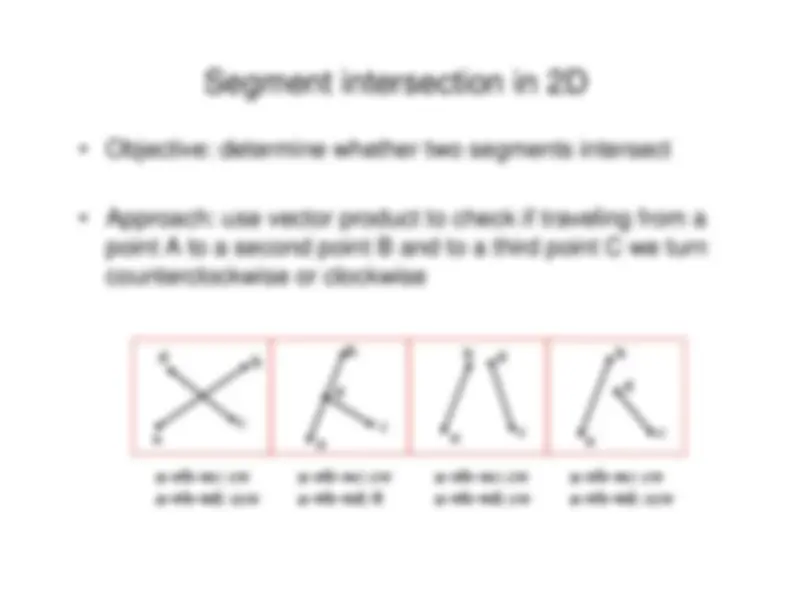
1. More geometric algorithms
2. Searching and sorting
3. Representing numbers on a computer





































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
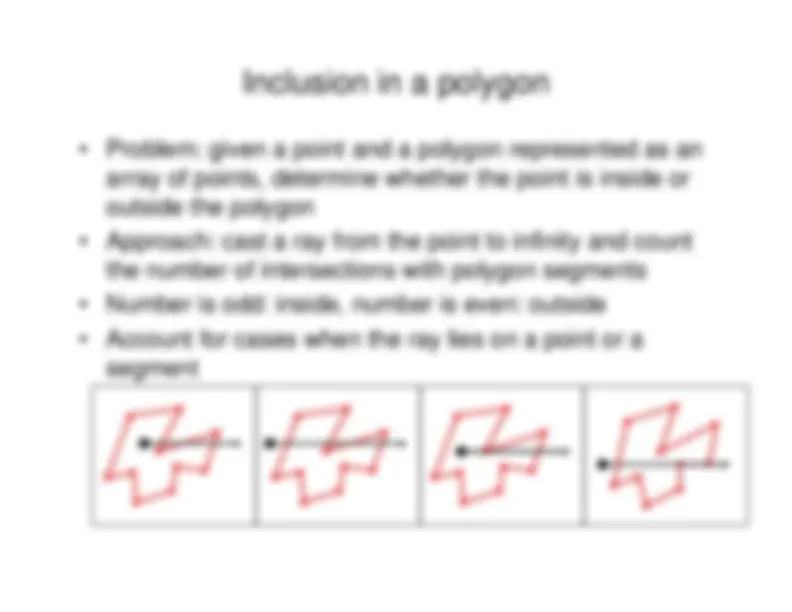
Various data structures and algorithms for representing and manipulating geometric entities such as points, segments, polygons, surfaces, and solids in 2d. It covers topics like segment intersection, point inclusion in a polygon, and unstructured grid data structures. Sample code snippets in c for segment intersection and point inclusion in a polygon.
Typology: Study notes
1 / 54

This page cannot be seen from the preview
Don't miss anything!
int ccw(pointT p0,pointT p1,pointT p2) {
dx1=p1.x-p0.x; dy1=p1.y-p0.y; dx2=p2.x-p0.x; dy2=p2.y-p0.y; if( dx1dy2 > dy1dx2 ) return +1; if( dx1dy2 < dy1dx2 ) return -1; if( (dx1dx2<0) || (dy1dy2<0) ) return -1; if( (dx1dx1+dy1dy1)<(dx2dx2+dy2dy2)) return +1; return 0;
} int intersect(segT s1,segT s2) {
return ((ccw(s1.p1,s1.p2,s2.p1)
*ccw(s1.p1,s1,ps,s2.p2)) <=0 )
&& ((ccw(s2.p1,s2.p2,s1.p1)
*ccw(s2.p1,s2,ps,s1.p2)) <=0 );
}
ip
e
1
e
2
e
3
e
4
e
5
ip
e
1
e
2
e
3
e
4
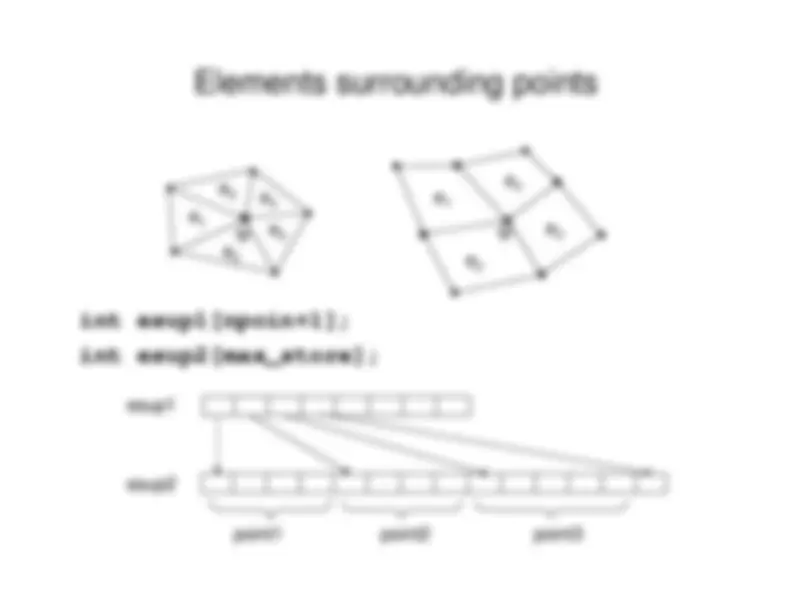
esup1 esup
point
point
point
for(i=0;
i<npoin;
i++)
loop
over
points
(i)
nel=esup1[i+1]-esup1[i];
num
elem
surr
i
lel=&esup2[esup1[i]];
list
elem
surr
i
for(j=0;
j<np;
j++)
loop
over
surr
elem
iel=lel[j];
get
next
elem
surr
do_work...
psup1 psup
point
point
point
ip
p
1
p
2
p
3
p
4
p
4
ip
p
1
p
2
p
3
p
4
p
5
p
6
p
7
p
8
Do
ipoin=1,npoin
loop
over
points
jp1=psup1(ipoin)+
first
point
surr
ipoin
jp2=psup1(ipoin+1)
last
point
surr
ipoin
do
jp=jp1,jp
loop
over
pts
surr
ipoin
jpoin=psup2(jp)
gather
point
do_work...
enddo
enddo
int
esuel[nnode*nelem];
init
esuel[1:nnode*nelem]=-
loop
over
elements
(ie)
loop
over
nodes
of
ie
(a)
get
b=next
node
of
ie
get
c=next
node
of
ie
loop
over
elements
surrounding
b
(je
ie)
if(je
and
ie
have
nodes
in
common)
then
store
je
as
neighbor
opposite
to
a
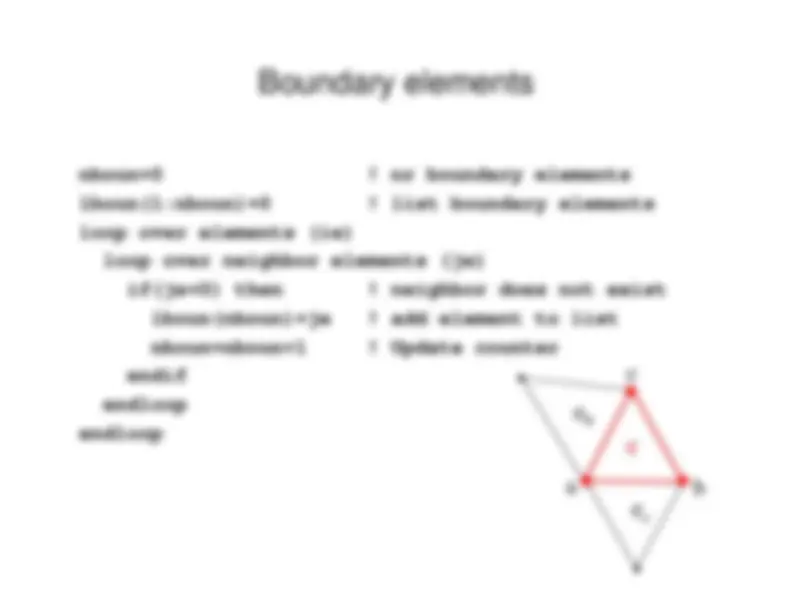
endif endloop endloop endloop
a
c
b
A
B
C
D
E