


http://www.cs.virginia/edu/~gfx/Courses/2005/ImageSynthesis/
CS 447/647: Image Synthesis
Greg Humphreys, Spring 2005
Ray Tracing 2:
Acceleration



Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
A series of notes from cs 447/647: image synthesis lectures given by greg humphreys during spring 2005. The third lecture covers preprocessing a scene using uniform grids and spatial hierarchies, including finding bounding boxes, determining grid resolution, placing objects in cells, traversing the grid using 3d line algorithms, and creating a tree of bounding volumes. The document also includes a comparison of schemes using spheres, rings, and hierarchical grids.
Typology: Study notes
1 / 9

This page cannot be seen from the preview
Don't miss anything!
http://www.cs.virginia/edu/~gfx/Courses/2005/ImageSynthesis/
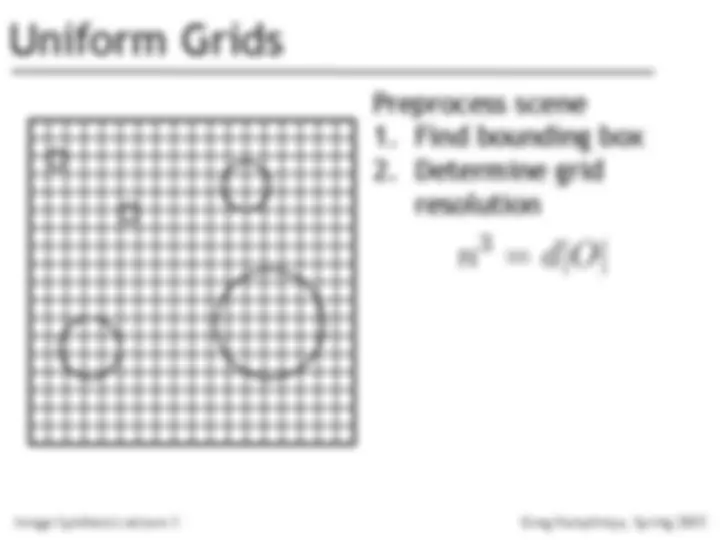
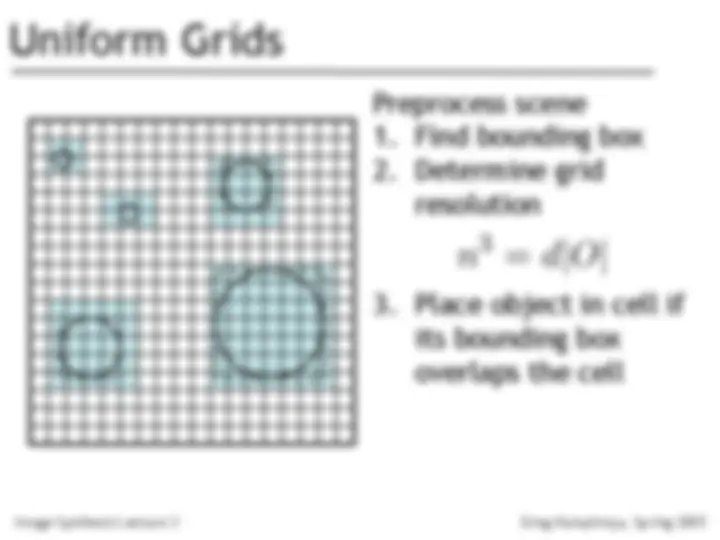
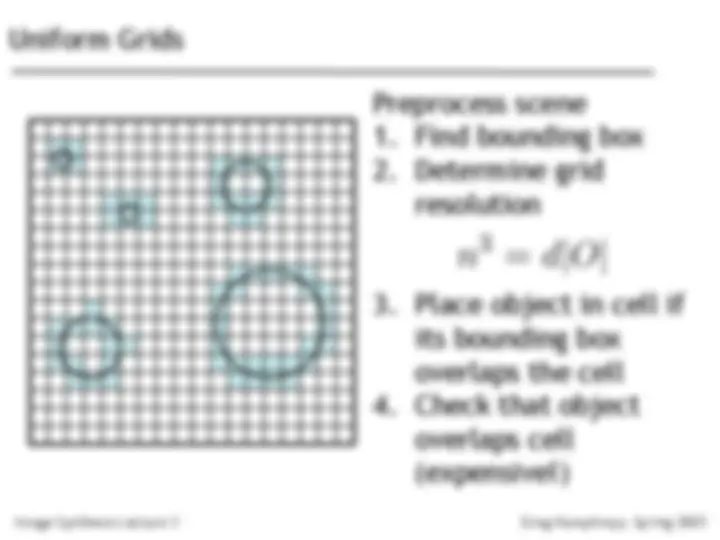
Preprocess scene
Uniform Grids Preprocess scene
Uniform Grids n 3 = d|O| Preprocess scene
Creating Spatial Hierarchies insert(node,prim) { if( overlap(node->bound,prim) ) if( leaf(node) ) { if( node->nprims > MAXPRIMS && node->depth < MAXDEPTH ) { subdivide(node); foreach child in node insert(child,prim) } else list_insert(node->prims,prim); } else foreach child in node insert(child,prim) } // Typically MAXDEPTH=16, MAXPRIMS=2-
Hierarchical Bounding Volumes Create tree of bounding volumes Children are contained within parent Creation preprocess From model hierarchy Automatic clustering Search intersect(node,ray,hits) { if( intersectp(node->bound,ray) if( leaf(node) ) intersect(node->prims,ray,hits) else for each child inter sect(child,ray,hits) }