



CSE245: Computer-Aided Circuit
Simulation and Verification
Lecture Note 5
Numerical Integration
1
Docsity.com








Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
These are the Lecture Slides of Circuit Simulation which includres Model Order Reduction, Implicit Moment Matching, Krylov Subspace Methods, Gaussian Elimination, Delta Transformation, Projection Framework, Conventional Design Flow etc. Key important points are: Numerical Integration, Forward Euler, Trapezoidal Rule, Equivalent Circuit Model, Convergence Analysis, Linear Multi-Step Method, Time Step Control, Ordinary Difference Equaitons, State Equation
Typology: Slides
1 / 21

This page cannot be seen from the preview
Don't miss anything!
2
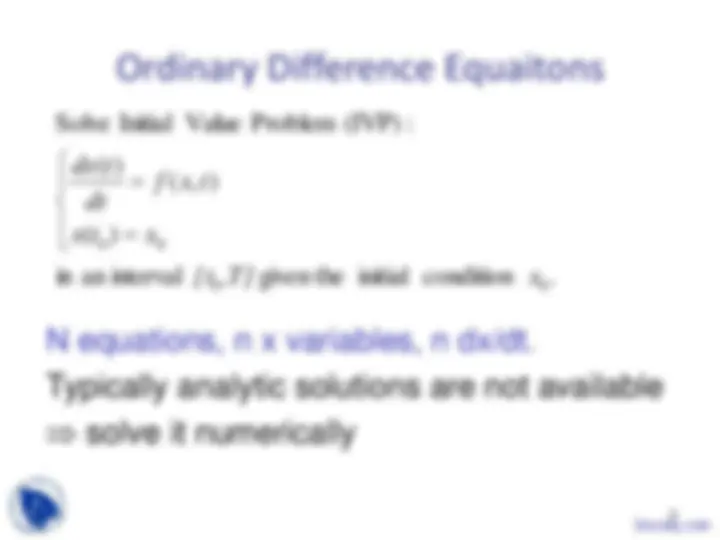
Numerical Integration
0 0
( ) ( , )
( )
dx t f x t dt x t x
=
(^) =
4
Forward Euler Backward Euler Trapezoidal
Numerical Integration: State Equation
5
Forward Euler
Backward Euler
Equivalent Circuit Model-BE
7
i t ( + ∆t ) ≅ i t( ) + ∆Lt v t( + ∆t)
v t ( + ∆t)
i t ( + ∆t)
i t ( + ∆t)
Req = ∆^ Lt
v t ( + ∆t)
v t ( + ∆t ) ≅ i t( + ∆t ) (^) ∆Lt −i t( )∆Lt
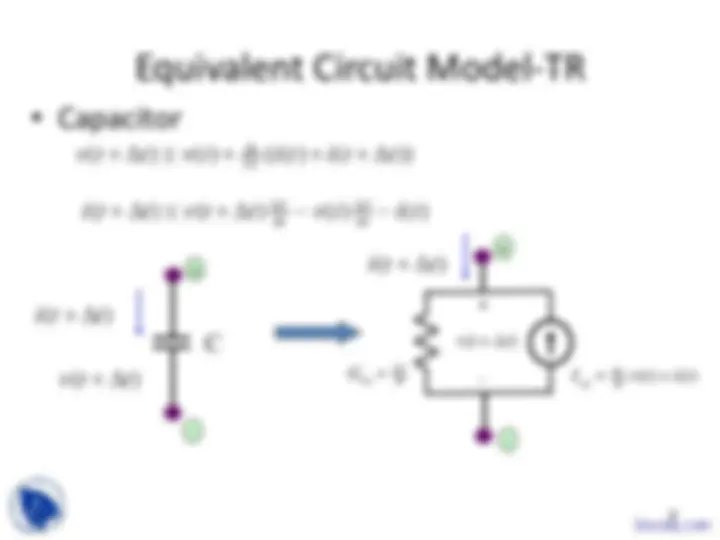
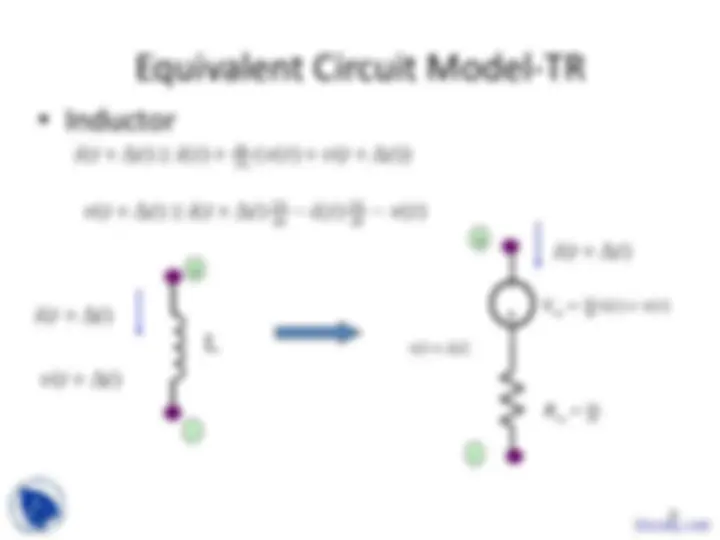
Equivalent Circuit Model-TR
8
t v t t v t (^) C i t i t t
∆ ≅ + ∆ + + ∆
v t ( + ∆t)
i t ( + ∆t)
i t ( + ∆t)
Geq =^2 ∆Ct
v t ( + ∆t)
i t + ∆t ≅ v t + ∆t (^) ∆t − v t (^) ∆t −i t
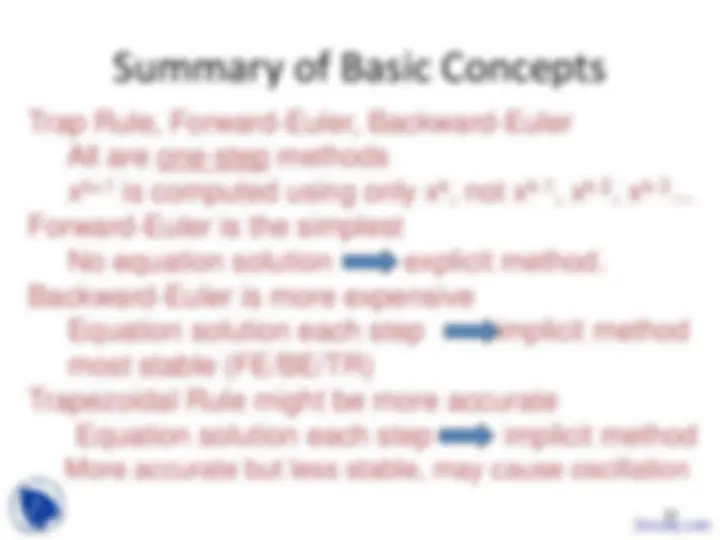
Trap Rule, Forward-Euler, Backward-Euler
All are one-step methods x k+1^ is computed using only x k, not x k-1^ , x k-2^ , x k-^ ...
Forward-Euler is the simplest
No equation solution explicit method.
Backward-Euler is more expensive
Equation solution each step implicit method most stable (FE/BE/TR)
Trapezoidal Rule might be more accurate
Equation solution each step implicit method More accurate but less stable, may cause oscillation
Stabilities
11
Froward Euler
k 1 k k
k k
x x hx
x λx
+ =^ + =
⇒ xk (^) + 1 = xk + h λ xk
1 1 (1^ )^ (1^ ) 0
k xk h λ xk h λ x
⇒ (^) + = + = +
13
Backward Euler
1 1
1 1
k k k
k k
1 1 0
k
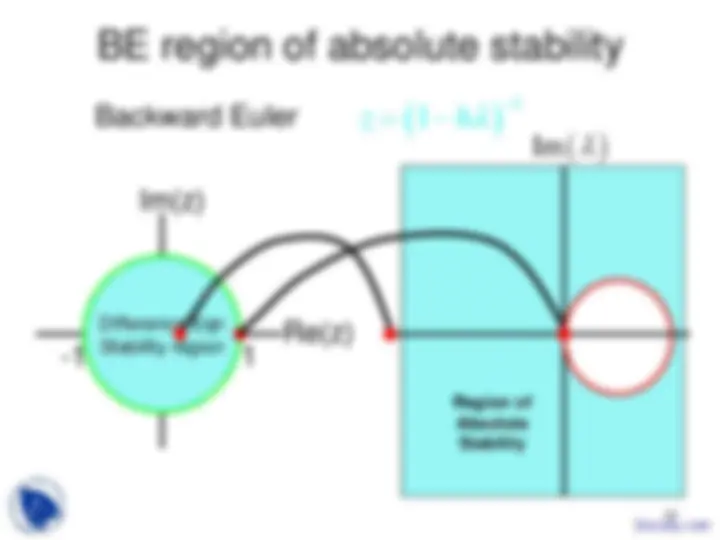
Difference Eqn Stability region -1 1
Im(z)
Re(z)
Im ( λ)
Backward Euler (^) ( )
1 z 1 h λ
− = −
Region of Absolute Stability
BE region of absolute stability
16
consistent if
Consistency + Stability Convergence
17
(smallest truncation error) is trapezoidal method.
the trapezoidal rule
LTE Docsity.com 19
the unit is charge for capacitor and flux for inductor
the unit is current for capacitor and voltage for inductor