



CSE245: Computer-Aided Circuit
Simulation and Verification
Lecture Note 4
Model Order Reduction (2)
1
Docsity.com






Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
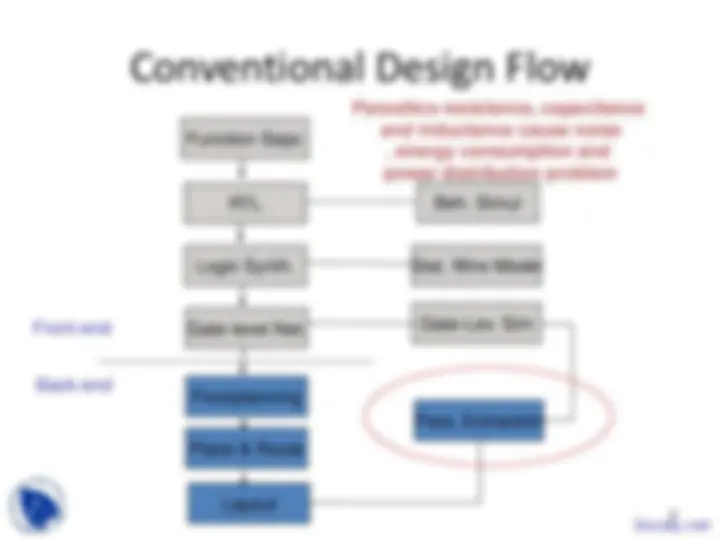
These are the Lecture Slides of Circuit Simulation which includres Model Order Reduction, Implicit Moment Matching, Krylov Subspace Methods, Gaussian Elimination, Delta Transformation, Projection Framework, Conventional Design Flow etc. Key important points are: Explicit Moment Matching, Model Order Reduction, Implicit Moment Matching, Krylov Subspace Methods, Gaussian Elimination, Delta Transformation, Projection Framework, Conventional Design Flow
Typology: Slides
1 / 17

This page cannot be seen from the preview
Don't miss anything!
Model Order Reduction: Overview
2
4
R,L,C Extraction
Model Order Reduction
Moment Matching Projection method
“Moments Matching” and “Projection”
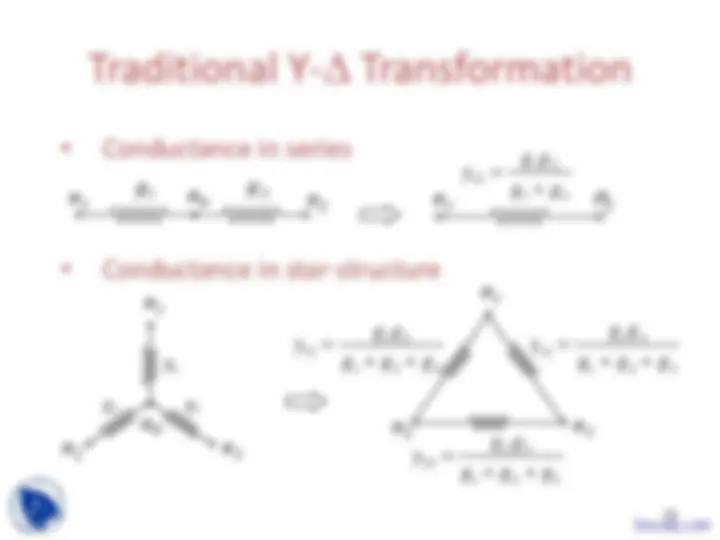
Congruence Transformation
7
Krylov Subspace
8
PRIMA
10
PRIMA: Properties
11
SPRIM
13
SPRIM
14
16
TICER: Issues
17