



AE-3515
Lecture Notes
09 Mar 2012
1
Friday, March 9, 12








Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
A set of lecture notes from a control systems engineering course. It covers the concepts of closed-loop and open-loop systems, block diagrams, and the design of pid controllers. The notes include diagrams, explanations, and examples to help students understand these topics.
Typology: Study notes
1 / 28

This page cannot be seen from the preview
Don't miss anything!
09 Mar 2012 1
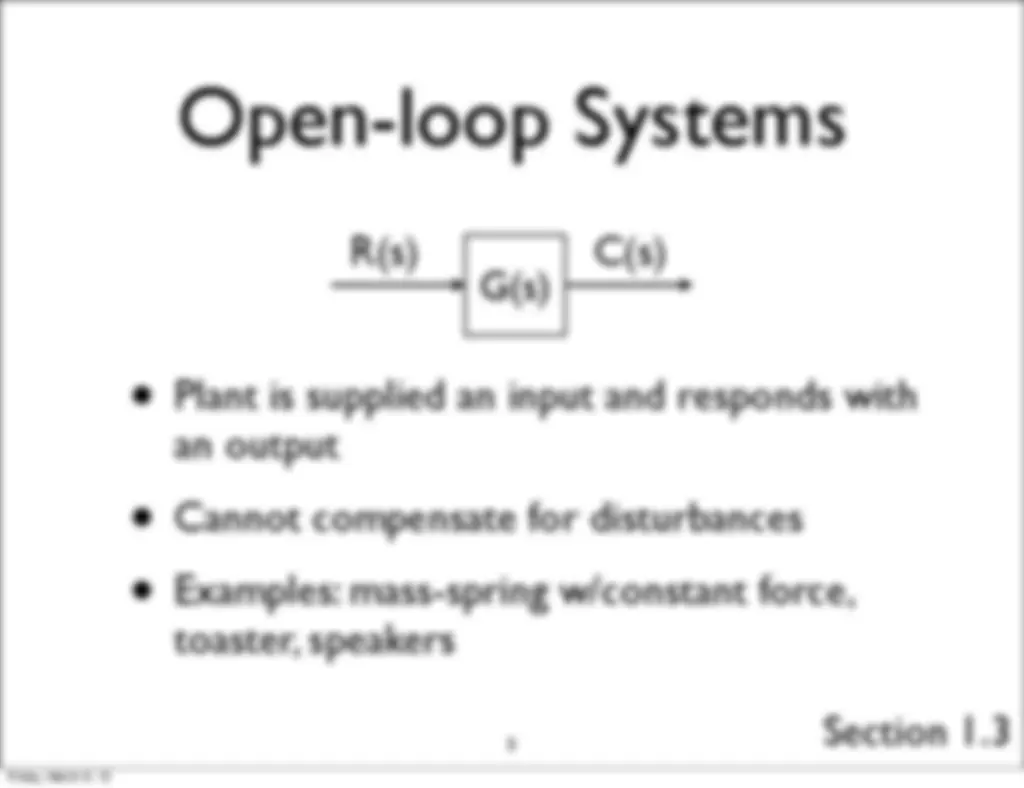
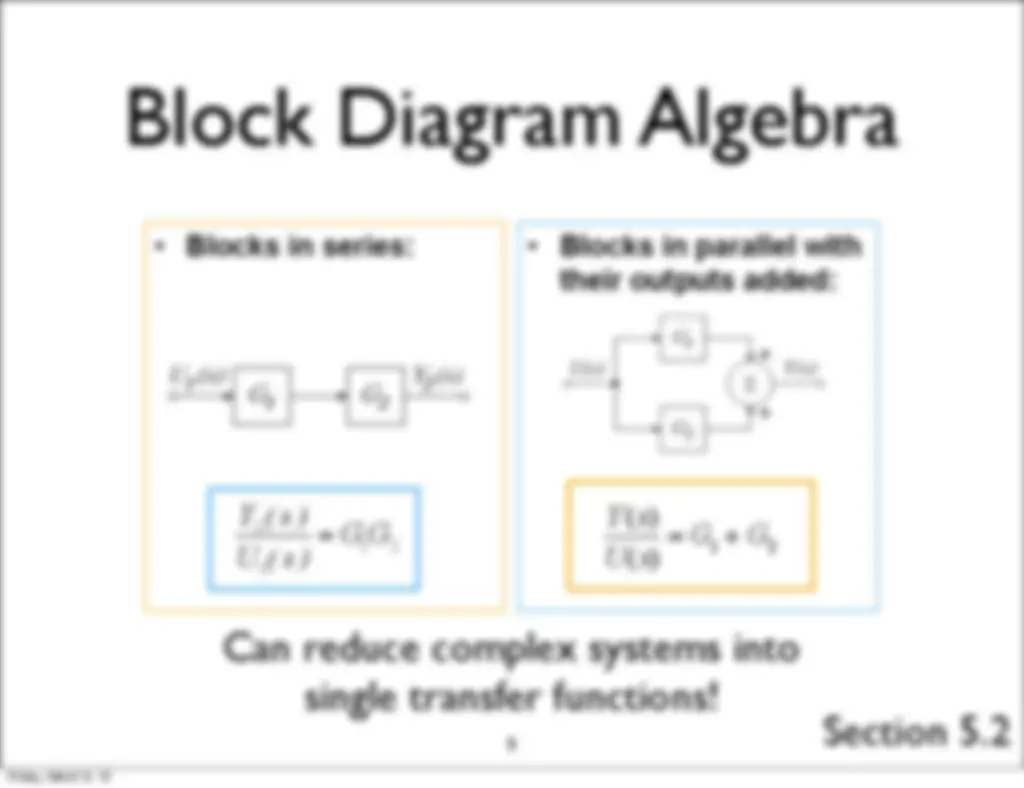
Block diagrams
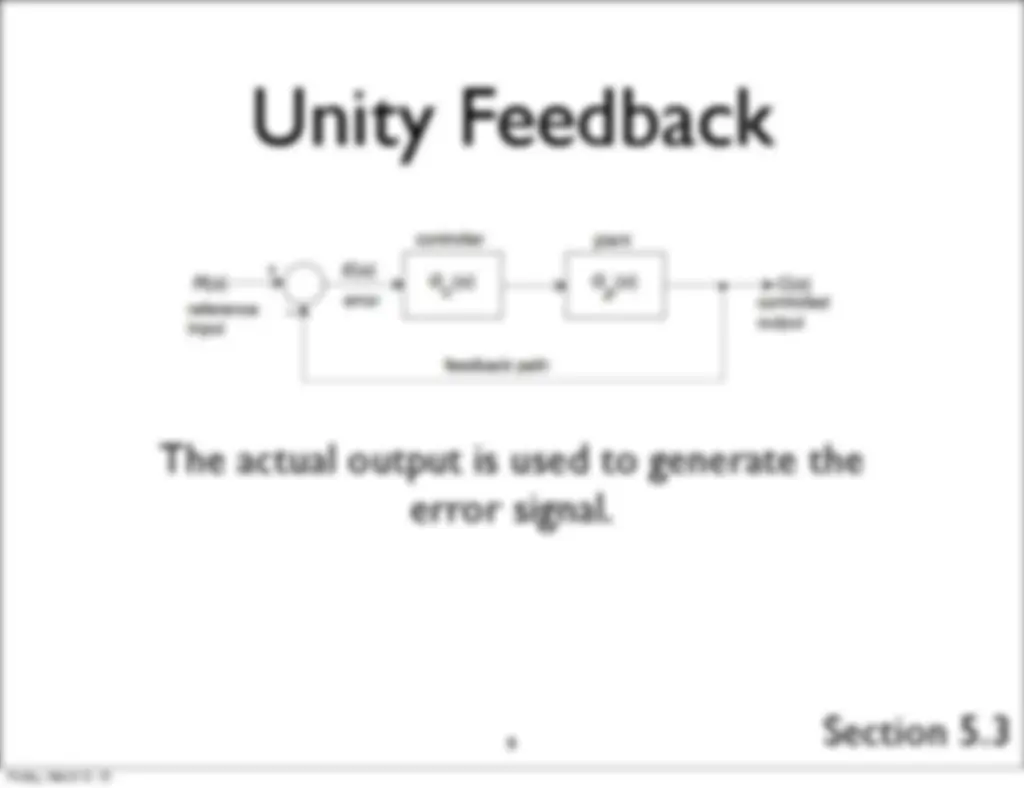
Feedback
P, I, D controllers
PID design 2
4
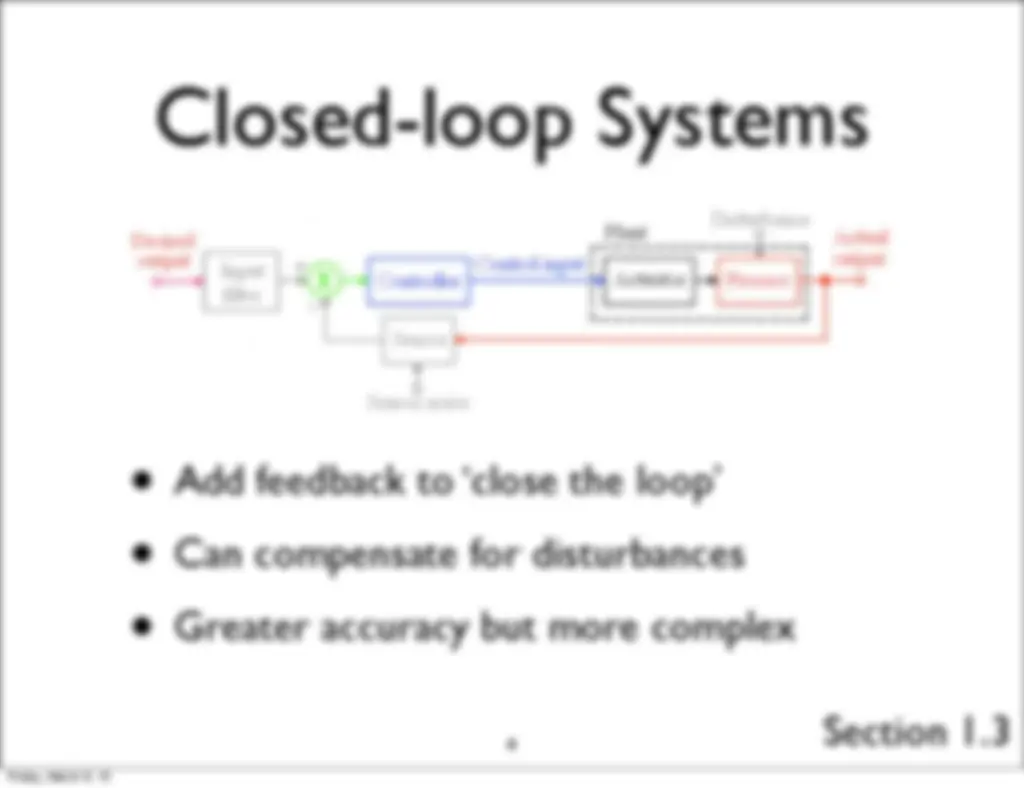
Add feedback to ‘close the loop’
Can compensate for disturbances
Greater accuracy but more complex Section 1.
Ge(s) is closed- loop transfer function
G(s)H(s) is the open-loop transfer function 7 Section 5.
8 Reduces to: Section 5.
The closed-loop transfer function becomes:
Notice that the characteristic equation for the above system becomes:
The controller has an effect on the system’s poles 10 ( ) ( ) 1 + Gc(s)Gp(s) = 0 Section 5.
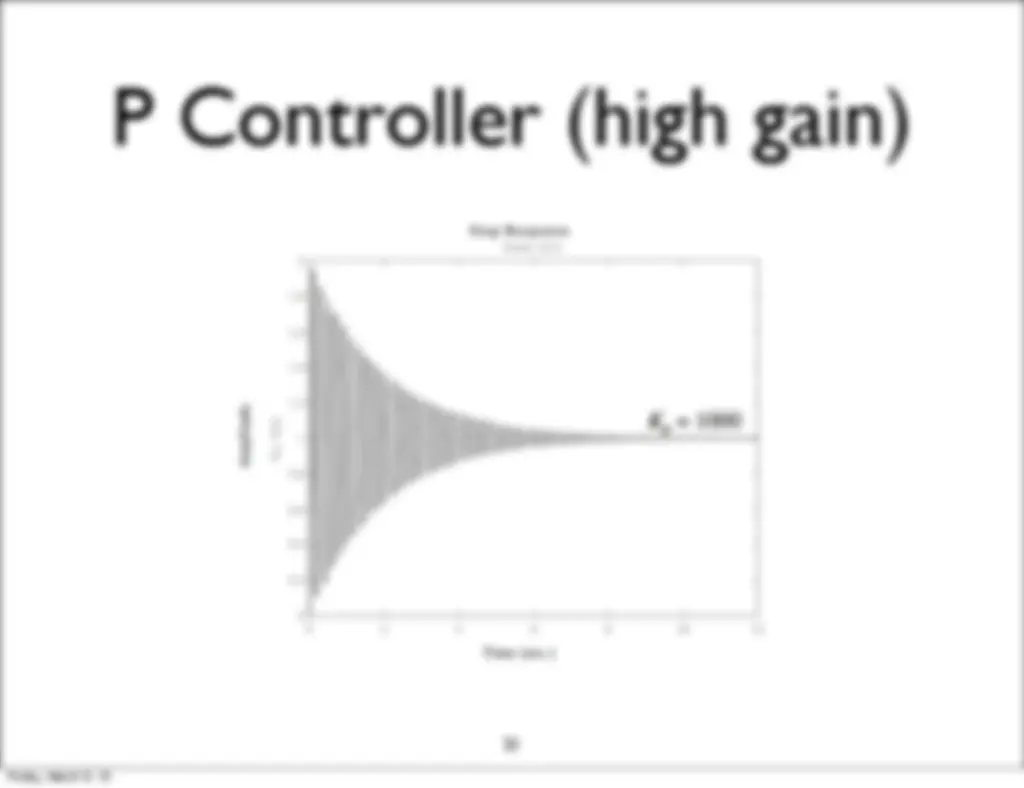
Proportional controllers
Integral controllers
Derivative controllers
Integral of error with a constant gain
Increase system type by 1
Differentiation of error with a constant gain
Reduce overshoot and oscillation
Do not affect steady-state response
Sensitive to noise u=Kd de/dt t 14
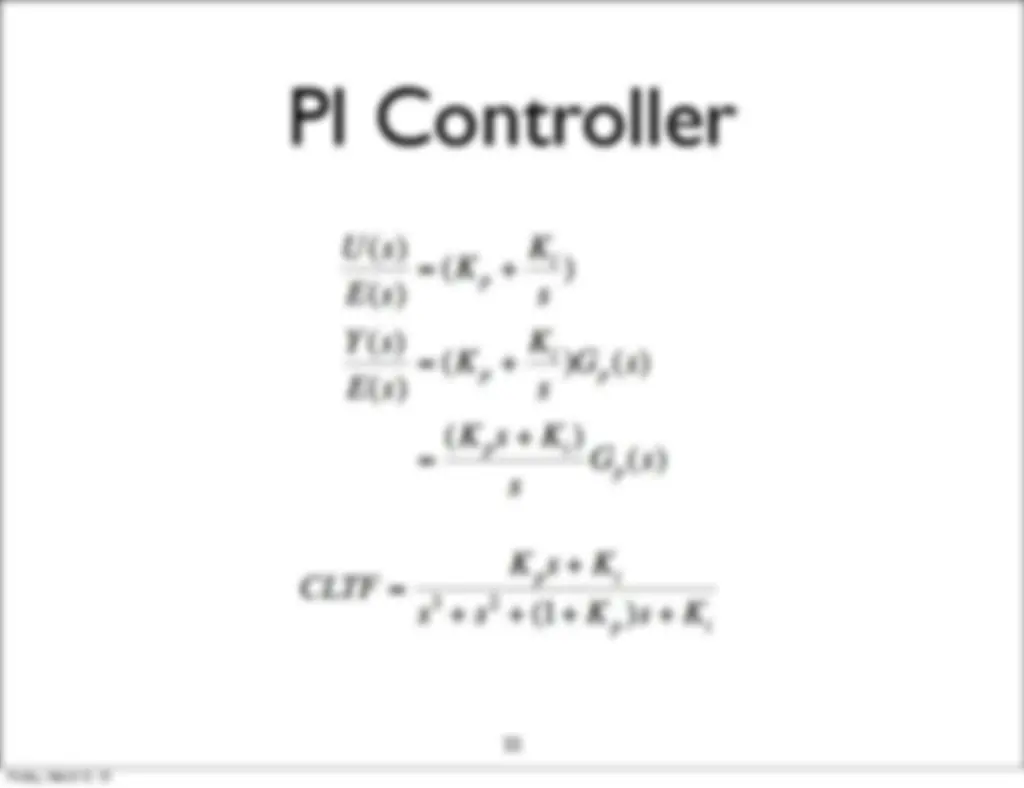
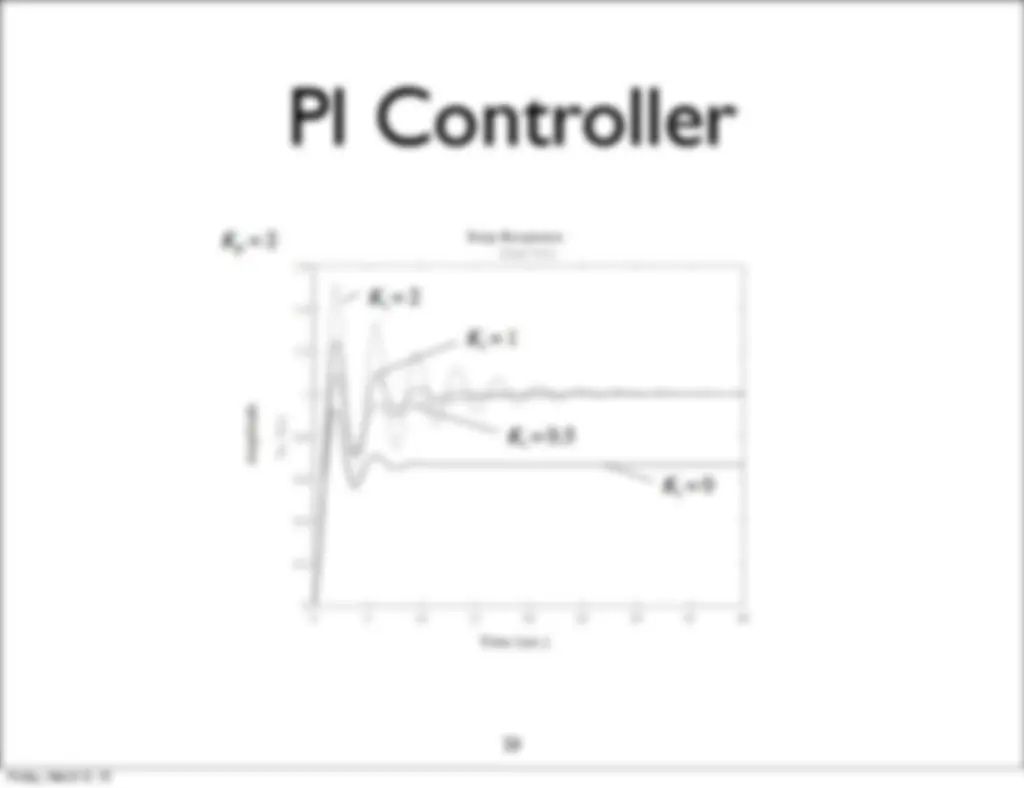
PI controller
PD controller
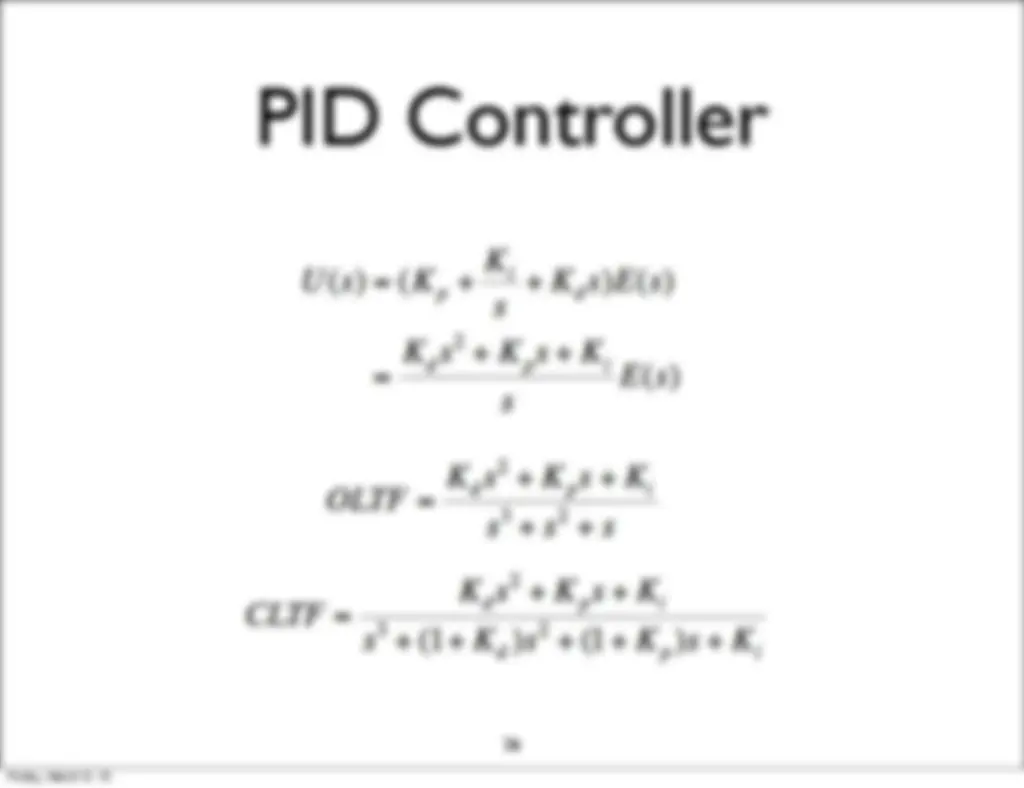
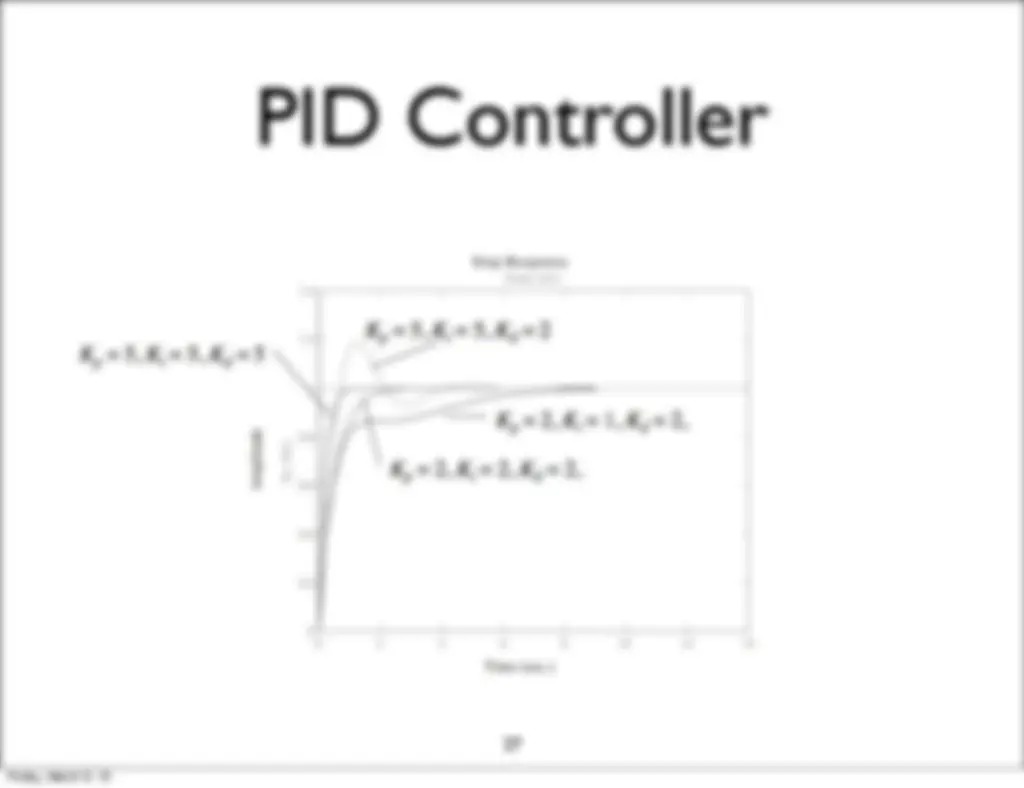
PID controller 16
17
Increase in gain
20