Cork Institute of Technology
Bachelor of Engineering (Honours) in Electronic Engineering- Award
(NFQ Level 8)
Summer 2007
Advanced Control
(Time: 2 Hours)
INSTRUCTIONS:
Answer any FOUR questions.
All questions carry 25 marks.
Examiners: Dr. T O' Mahony
Prof. G. Hurley
Dr. S. Foley
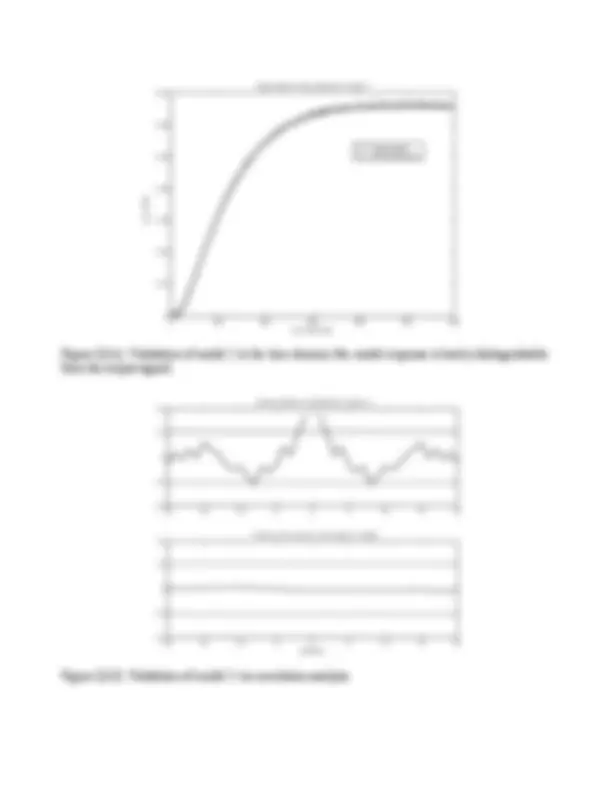
Q1. The set of data shown in Figure Q1(a) was used to identify two discrete-time transfer
function models using the System Identification Toolbox in MATLAB. The models were
also analysed using the system identification toolbox and the graphical analysis is
illustrated in Figures Q1(b) – Q1(g). Figures Q1(b) – Q1(d) are associated with model 1
while Figures Q1(e) – Q1(g) are associated with model 2. Model 1 is a first-order transfer
function with a delay of 17 samples while model 2 is a fifth-order transfer function with a
delay of 17 samples. The objective of the modelling process is to design a controller for the
system represented by the data shown in Figure Q1(a).
(a) Interpret Figures Q1(b) – Q1(g) and based on your understanding of these diagrams state
which model you would use and support your analysis with reference to each of these
Figures. [15 marks]
(b) The algorithms used in the MATLAB System Identification Toolbox are extensions of the
Least Squares algorithm. In your own words, describe the key concepts that underpin the
Least Squares algorithm. [10 marks]