



FEEDBACK CONTROL
SYSTEM
NED University of Engineering & Technology
LAB # 09
1
















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Proportional Integral Derivative controller
Typology: Study notes
1 / 31

This page cannot be seen from the preview
Don't miss anything!
NED University of Engineering & Technology
(^) Objective: Introduction to PID controller
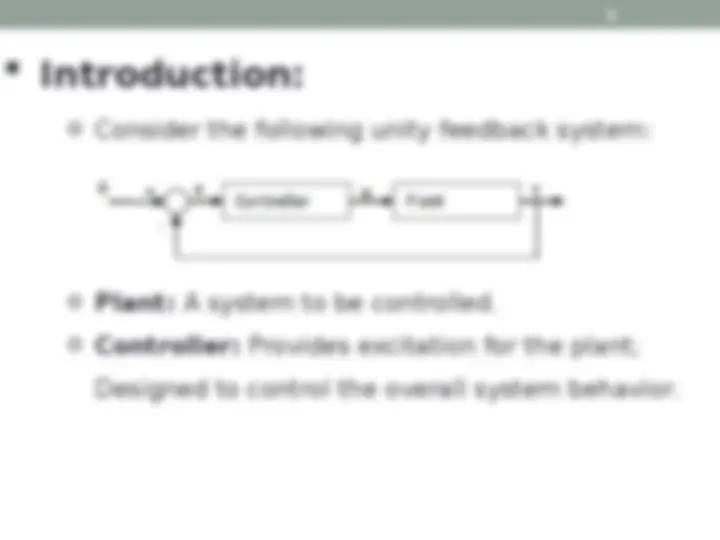
o (^) First, let's take a look at how the PID controller works in a closed-loop system using the schematic shown. o (^) The variable (e) represents the tracking error , the difference between the desired input value (R) and the actual output (Y). o (^) This error signal (e) will be sent to the PID controller , and o (^) the controller computes both the derivative and the
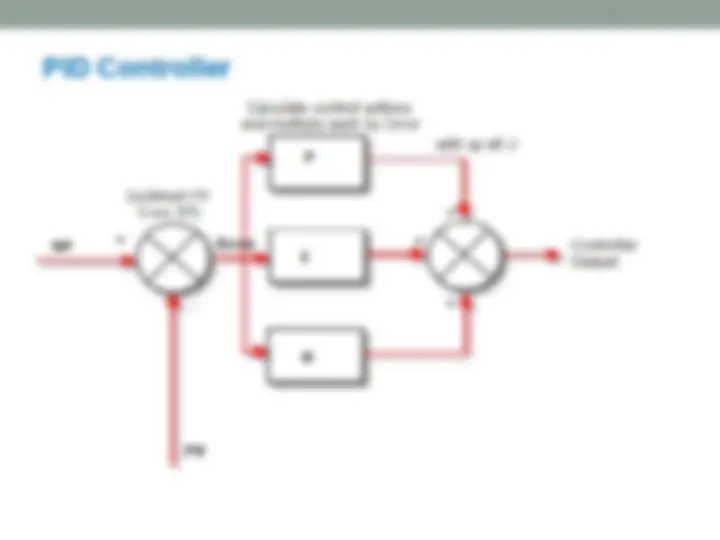
o (^) The signal (u) just past the controller is now equal to the proportional gain (KP) times the magnitude of the error plus the integral gain (KI) times the integral of the error plus the derivative gain (KD) times the derivative of the error.
Temperature Control System
o (^) The three-term controller: The transfer function of the PID controller looks like the following: o (^) KP = Proportional gain o (^) KI = Integral gain o (^) KD = Derivative gain
o (^) Suppose we have a simple mass, spring, and damper problem. o (^) The transfer function between the displacement X(s) and the input F(s) then becomes:
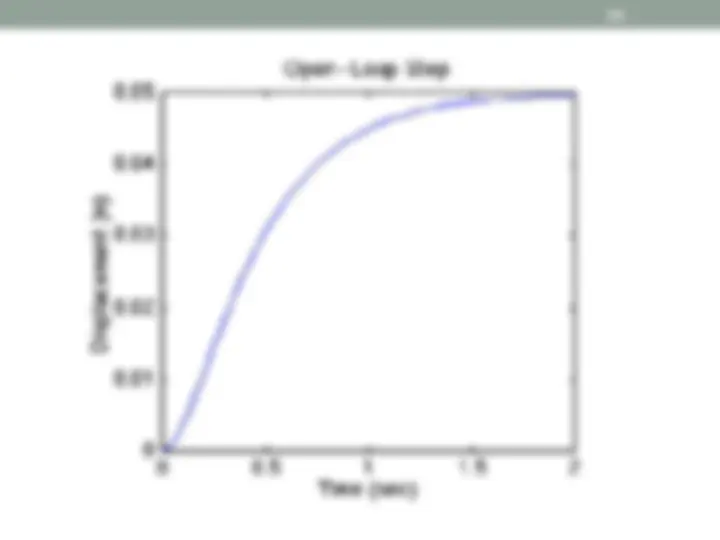
(^) Open-loop step response: Let's first view the open-loop step response. num=1; den=[1 10 20]; plant=tf(num,den); step(plant) MATLAB command window should give you the plot shown below.
o (^) The closed-loop transfer function of the above system with a proportional controller is: et the proportional gain (KP) equal 300 :
Kp=300; contr=Kp; sys_cl=feedback(contr*plant,1); %by default –ve feedback put 1 and for positive feedback + t=0:0.01:2; step(sys_cl,t)
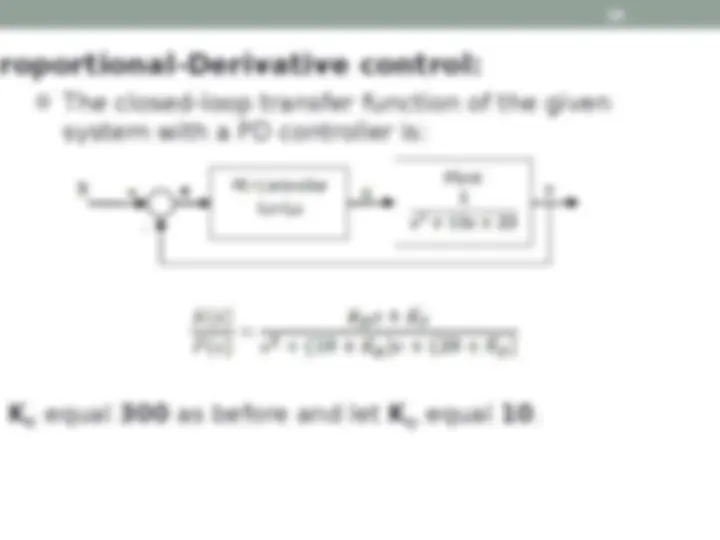
o (^) The closed-loop transfer function of the given system with a PD controller is: t K P equal 300 as before and let K D equal 10.
Kp=300; Kd=10; contr=tf([Kd Kp],1); sys_cl=feedback(contr*plant,1); t=0:0.01:2; step(sys_cl,t)