Download Power System Stability: Steady-State and Transient Stability Analysis and more Lecture notes Computer-Aided Power System Analysis in PDF only on Docsity!
Power System Stability
EEP 3703
Stability
Definition: The ability of a power system to remain in synchronism and maintain the state of equilibrium following a disturbance.
- (^) Steady-state stability – Ability to regain synchronism after small and slow disturbance (Gradual power changes).
- (^) Transient Stability - Ability to regain synchronism after large and sudden disturbance (Fault, outage of a line, sudden application or removal of loads, generator failure).
Transient Stability
- (^) Transient stability studies determine whether the synchronism is maintained after a system is subjected to large disturbance
- (^) Large power and voltage angle oscillations do not permit linearization of the system model
Disturbance
Sudden change or sequence of changes occur in one or more parameters
- (^) Large Disturbance – after its occurrence, the non-linear equations describing the dynamics of the power system cannot be validly linearised
- (^) Small Disturbance – after its occurrence, the non-linear equations can be linearised
Swing Equation
Swing Equation
- (^) Consider a synchronous generator developing an electromagnetic torque Te and running at synchronous speed ωsm. If Tm is the driving mechanical torque, then under steady-state operation, with losses neglected, Tm = Te
- (^) A disturbance will results in an accelerating (Tm > Te) or decelerating (Tm < Te) torque Ta on the rotor, where Ta = Tm – Te
- (^) Accelerating torque is the product of moment of inertia of the rotor, J times its angular acceleration.
- (^) Swing equation in terms of inertia constant
- (^) To write the swing equation in terms of electrical power angle, δm is the rotor position before disturbance at time t = 0, where
- (^) The electrical angular velocity is related to the mechanical angular velocity by
- (^) And the equation becomes
- (^) Expressing the equation in terms of frequency (radian) (degree)
Example: A 3-phase, 60 Hz, 500 MVA, 15kV, 32-pole hydroelectric generating unit has an H constant of 2.0 pu s. a) Determine ωs and ωms b) The unit is initially operating at Pm = Pe = 1.0 pu, ω = ωs, and δm is the rotor position before disturbance at time t = 0, = 10 degree when a short circuit at the terminal causes Pe to drop to zero for t≥0. Determine the power angle 3 cycles after the short circuit commences. Assume Pm remains constant at 1.0 pu.
Example: Answer : 100 rpm/s, 20 degree, 3620 rpm
Example: Answer: 377 rad/s, 188.5 rad/s, 3.0 x 109 J, 15.708 rad/s2, 31.416 rad/s
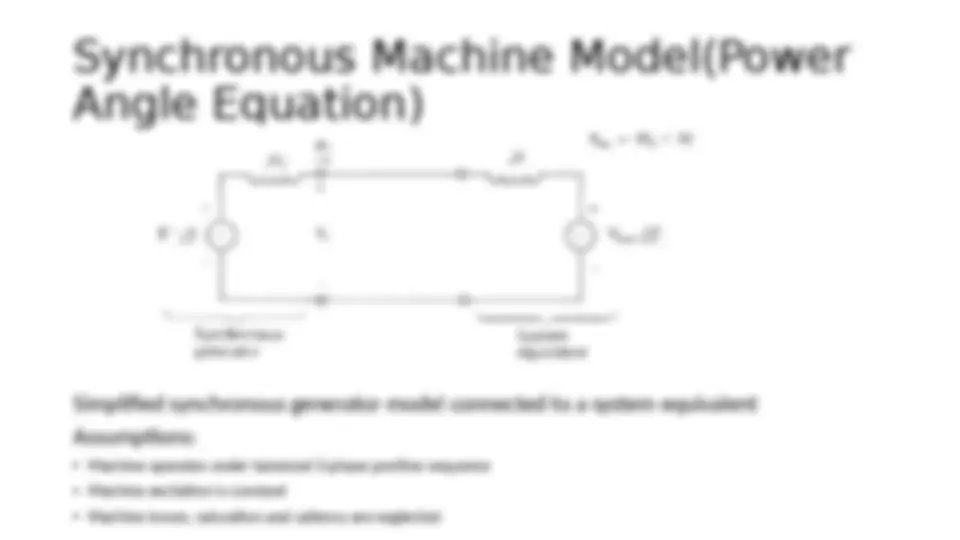
- (^) The real power delivered by the synchronous generator to the infinite bus is
- (^) The relation shows that the power transmitted depends on the reactance and the angle between the two voltages.
Power angle curve
- (^) The maximum power is referred to as the steady-state stability limit, and occurs at 90 degree angular displacement
- (^) Advancing δm is the rotor position before disturbance at time t = 0, further will cause loss of synchronism with the infinite bus bas.