Download Hohmann Transfer Orbit: Calculating Delta V for Transfers between Orbits and more Assignments Aerospace Engineering in PDF only on Docsity!
700 km
REarth
Transfer Ellipse
+2 pts. EXTRA
for plotting
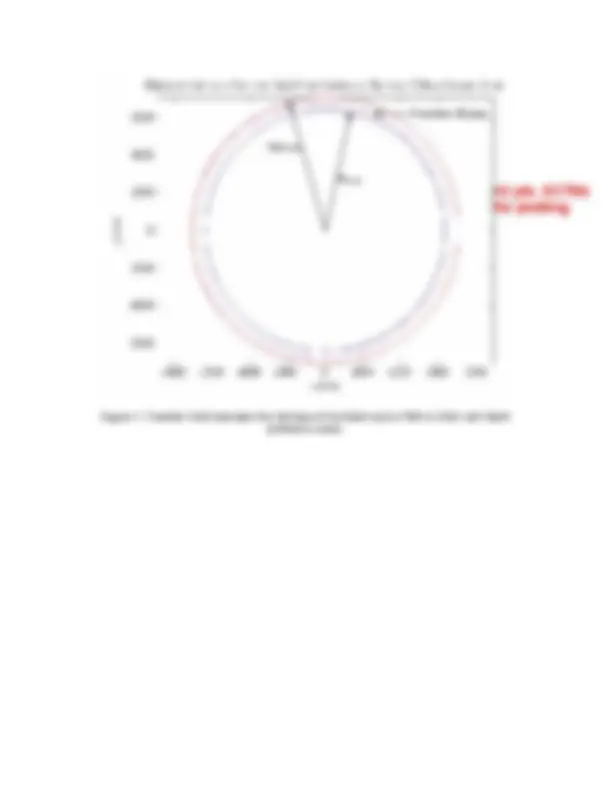
Figure 1: Transfer Orbit between the Surface of the Earth and a 700km Orbit with Earth
plotted to scale.
500 km REarth
10000 km
Transfer Ellipse
Figure 2: Transfer Orbit between 500km and a 10000km Orbit With Earth plotted to scale.
+ 3pts.
for discussion
Discussion:
This strategy, Hohmann Transfer Orbit, for calculating ∆V is primarily used for calculating
the required velocity change for transferring from one orbit to another, as in Figure 2. The
conditions at the beginning and end of the transfer orbit are determined completely by the
velocity of the s/c on the initial and final orbit. Assuming a launch from the surface of the
Earth brings many additional factors into account, such as the effects the atmosphere has
on the s/c trajectory. However, using this Hohmann Transfer approximation provides a
∆VEarth= 8.04 [km/s]. The method of assuming a direct insert into a 700km Orbit provides a
∆V700km= 7.49 [km/s].
N:\School\TA\251_TA_Williams\HW\HW3\Hohmann_transfer.m
Page
February 11, 2004
PM
Stephanie (^) Van (^) Y
.m (^) file (^) for (^) orbit (^) graphing (^) in (^) cartesian (^) coordinates clear (^) all close (^) all R_Earthclc = 6378; %[km] (^) Radius (^) of (^) the (^) Earth H_initial (^) = (^) 500; %[km] (^) Altitude (^) of (^) Initial (^) Orbit H_final (^) = (^) 10000; %[km] (^) Altitude (^) of (^) Final (^) Orbit
R_IN
(^) R_Earth (^) + (^) H_initial;
R_OUT
(^) R_Earth (^) + (^) H_final; theta (^) = (^) [0:0.001:2*pi];
Elliptical (^) Transfer (^) Orbit ra (^) = (^) R_OUT; %[km] (^) Radius (^) of (^) Periapsis rp (^) = (^) R_IN; %[km] (^) Radius (^) of (^) Apoapsis a = .5*(rp+ra); %[km] (^) Semimajor (^) axis e = (^1)
(rp/a); % Eccentricity (^) of (^) Transfer (^) ellipse Pe (^) = (^) a(1-(e^2)); %km Semi-Latus (^) Rectum (^) (Parameter) x_Trans (^) = (^) [[Pe./(1+e.cos(theta))].cos(theta)]; y_Trans (^) = (^) [[Pe./(1+e.cos(theta))].*sin(theta)];
Earth (^) to (^) scale x_Earth (^) = (^) R_Earth.cos(theta); y_Earth (^) = (^) R_Earth.sin(theta);
Inner (^) Orbit (^) of (^) Hohmann (^) Transfer x_Inner (^) = (^) R_IN.cos(theta); y_Inner (^) = (^) R_IN.sin(theta);
Outer (^) Orbit (^) of (^) Hohmann (^) Transfer x_Outer (^) = (^) R_OUT.cos(theta); y_Outer (^) = (^) R_OUT.sin(theta); title('Ellipticalplot(x_Earth,y_Earth,'k',x_Trans,y_Trans,'m-.',x_Inner,y_Inner,'b--',x_Outer,y_Outer,'r')figure(1) (^) Hohmann (^) Transfer (^) Orbit (^) 500km (^) to (^) 10000km (^) Circular Orbits') xlabel('x (^) (km)') ylabel('y (^) (km)') axis (^) equal
Feasible
Region
Infeasible Region
Figure 1: For the Staging conditions stated in Problem 2 of Homework 3 the mass of each
stage was plotted for a range of ∆V ratios for different payload masses (1-1000[kg]) to
determine the feasible region of analysis for the ∆V ratio.
+3 pts. for figures 1 and/or 2
The student must demonstrate (somehow) that they
understand that part of the original graph (Figure 1) is
infeasible. Only providing Figure 2 information is okay.
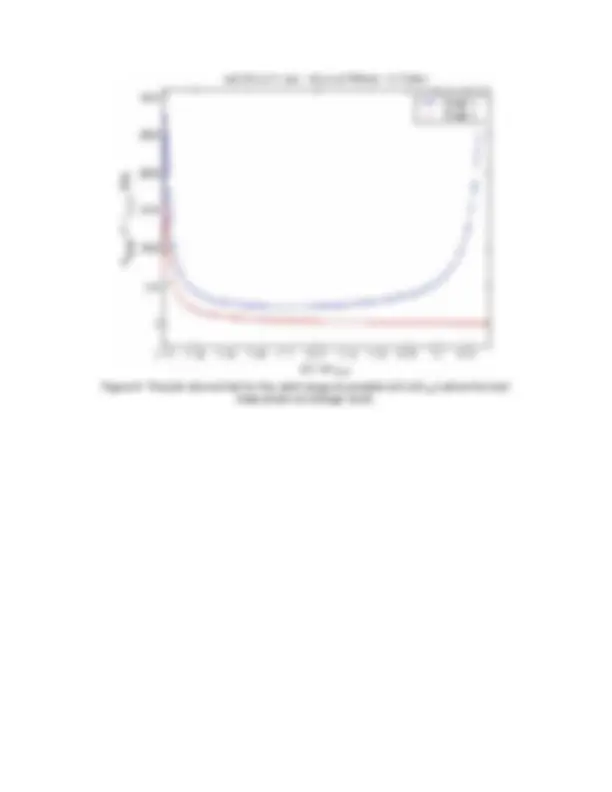
Figure 2: Using the results for Figure 1 this plot shows the feasible range of (∆V 1 /∆Vtot)
ratios for which the rocket can be designed. This graph also gives and idea of the
magnitude of initial masses that will be under investigation (mpay = 1-1000 [kg] in this
graph)
Figure 9: Calculating the cost for the rocket based on the propellant mass and inert mass
shows that the optimal design point for this particular rocket. The optimal (∆V 1 /∆Vtot) is the
same for both cost and mass (since the cost was based on mass!) within a reasonable
amount of error.
+ 5pts.
Full credit is awarded for comparing (and discussing) the
(∆V 1 /∆Vtot) for the minimum mass and minimum cost.
Begin Extra graphs which describe the problem.
mpay = 1000 [kg]
mpay = 500 [kg]
mpay = 100 [kg]
Figure 4: Total mass to (∆V 1 /∆Vtot) ratio form mpay = 100- 1000 [kg]. This plot simply shows
how the total mass of the vehicle scales with payload mass. For 10x the payload mass the
overall vehicle mass goes up an order of magnitude. Is this typical for launch vehicle?
Figure 6: Propellant ratios fractions for
each stage. The crossing point dentifies the
(∆V 1 /∆Vtot) ratio at which each stage would
carry the same ratio of propellant.
The (mp/mtot) for each stage is 0.38 and 0.14 for
each stage respectively. This means that the
first stage would have more overall propellant
than the second stage. This is consistent with
previous findings. Also, the first stage has
much more mass to move than the second
stage.
Figure 7: This graph of (mp/mf) for each stage shows that for (∆V 1 /∆Vtot)=0.23 the minimum
amount of propellant is used, and therefore the minimum total mass. The graph shows
that for the first stage mp1 ~ m^ f1. While for the second stage mp2 ~ 3m^ f2.