Download Ray Intersect - Introduction to Computer Graphics - Lecture Slides and more Slides Computer Graphics in PDF only on Docsity!
Lecture 17:
Ray Intersect
Review
• In ray casting, there are three steps:
– Step 1: Generating a Ray
- A. Find the ray in world coordinate system
- B. Find the ray in camera coordinate system and transform it
to world coordinate
– Step 2: Intersection
- Intersects the ray with all objects in the world
- Return the nearest point on the nearest object
– Step 3: Coloring the Pixel
- Direct illumination (Assignment 5: intersect)
- Indirect illumination (Assignment 6: recursive ray tracer)
Step 2: Ray-Object Intersection
(Implicit Objects)
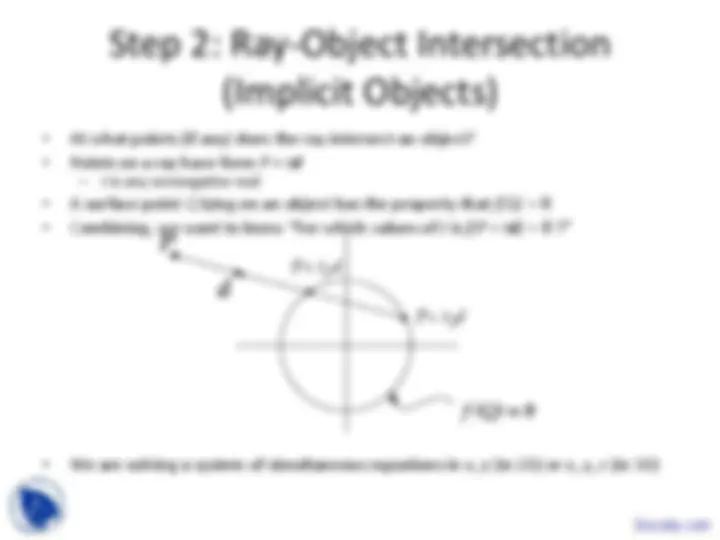
- At what points (if any) does the ray intersect an object?
- Points on a ray have form P + t d
- t is any nonnegative real
- A surface point Q lying on an object has the property that f(Q) = 0
- Combining, we want to know “For which values of t is f(P + t d ) = 0 ?”
- We are solving a system of simultaneous equations in x , y (in 2D) or x , y , z (in 3D)
Step 2: Ray-Object Intersection
(Implicit Objects)
2D ray-circle intersection example
- Consider eye-point P = (-3, 1), direction vector d = (.8, -.6) and the unit circle:
f(x,y) = x^2 + y^2 – R^2
- A typical point of the ray is:
Q = P + t d = (-3,1) + t (.8,-.6) = (-3 + .8t,1 - .6 t )
- Plugging this into the equation of the circle:
f (Q) = f (-3 + .8t,1 - .6 t ) = (-3+.8 t )^2 + (1-.6 t )^2 - 1
9 – 4.8 t + .64 t^2 + 1 – 1.2 t + .36 t^2 - 1
- Setting this to zero, we get:
t^2 – 6 t + 9 = 0
Step 2: Ray-Object Intersection
2D ray-circle intersection example (continued)^ (Implicit Objects)
- Generalizing:
- we can take an arbitrary implicit surface with equation f(Q) = 0 , a ray P + t d , and plug the latter into the former:
f ( P + t d ) = 0
- The result, after some algebra, is an equation with t as unknown
- We then solve for t , analytically or numerically
Step 2: Ray-Object Intersection
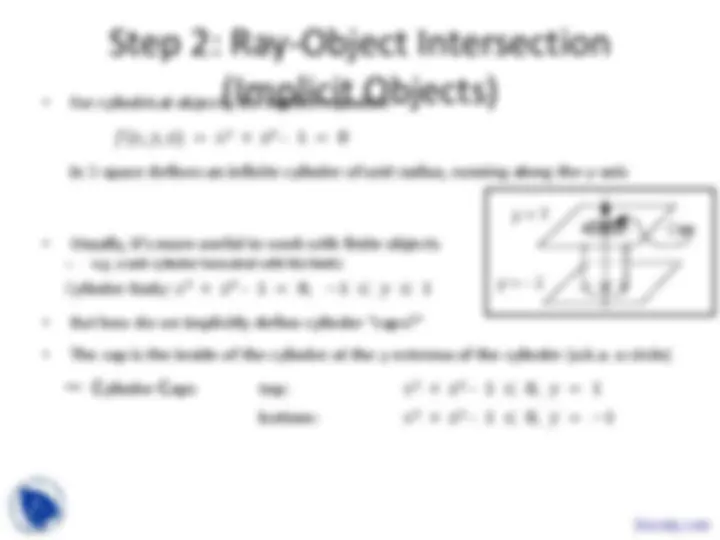
- For cylindrical objects, the implicit equation^ (Implicit Objects)
𝑓(𝑥, 𝑦, 𝑧) = 𝑥^2 + 𝑧^2 – 1 = 0
in 3-space defines an infinite cylinder of unit radius, running along the y-axis
- Usually, it’s more useful to work with finite objects
- e.g. a unit cylinder truncated with the limits: Cylinder Body: 𝑥^2 + 𝑧^2 – 1 = 0, −1 ≤ 𝑦 ≤ 1
- But how do we implicitly define cylinder “caps?”
- The cap is the inside of the cylinder at the y extrema of the cylinder (a.k.a. a circle)
- cylinder caps top: 𝑥^2 + 𝑧^2 – 1 ≤ 0, 𝑦 = 1
bottom: 𝑥^2 + 𝑧^2 – 1 ≤ 0, 𝑦 = −
Cap
Step 2: Ray-Object Intersection
(Implicit Objects)
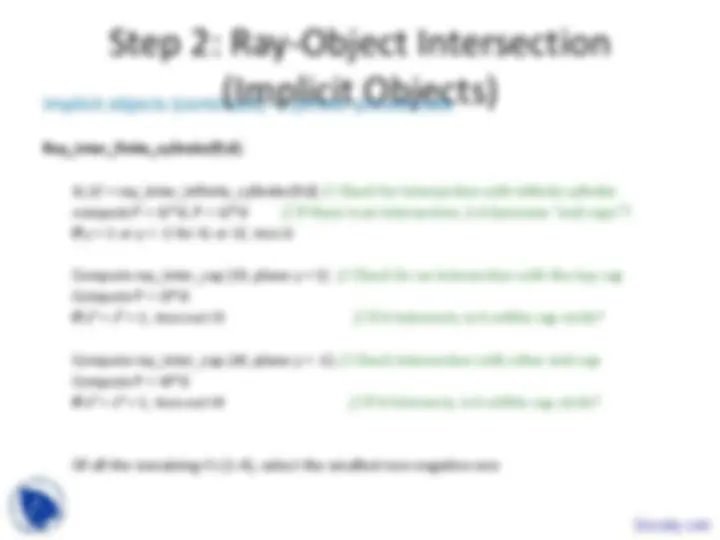
Implicit surface strategy summary
- Substitute ray ( P + t d ) into implicit surface equations and solve for t
- smallest non-negative t -value is the closest surface you see from eye point
- For complicated objects (not defined by a single equation), write out a set of equalities and inequalities and then code individual surfaces as cases…
- Latter approach can be generalized cleverly to handle all sorts of complex combinations of objects - constructive Solid Geometry (CSG), where objects are stored as a hierarchy of primitives and 3-D set operations (union, intersection, difference) - “blobby objects”, which are implicit surfaces defined by sums of implicit equations (F(x,y,z)= 0 )
CSG!
Cool Blob!
Step 2: Ray-Object Intersection
• So far, we have seen how intersection works if
the object is in the world coordinate, and its
parameters are simple
– That is, the object sits at (0, 0, 0), and has unit radius
• In real examples, the objects have often been
translated, rotated, and scaled.
• How would we apply the same solution to these
objects?
Step 2: Ray-Object Intersection (Object
Coord)
- Let the world-space intersection point be defined as MQ , where Q is a point in object space: 𝑃 + 𝑡𝒅 = 𝑀𝑄 𝑀−1^ ⋅ 𝑃 + 𝑡𝒅 = 𝑄 𝑀−1𝑃 + 𝑡𝑀−1𝒅 = 𝑄 Let 𝑃 = 𝑀−1𝑃, 𝒅 = 𝑀−1𝒅
- If 𝑓 𝑥, 𝑦, 𝑧 is the equation of the untransformed object, we just have to solve 𝑓 𝑃 + 𝑡𝒅 = 0
- note: 𝒅 is probably not a unit vector
- the parameter t along this vector and its world space counterpart always have the same value.
- normalizing 𝒅 would alter this relationship. Do NOT normalize 𝒅. Why??
(0,0,0)
MQ
P t d
f ( x , y , z ) 0
d^11 d
~ ~ P t M P tM
Q
f x y z
Step 2: Ray-Object Intersection (Object
Coord)
- In the example, we already know the matrix M, which transforms the
object from object coordinate into world coordinate.
- Recall, M is the matrix that translate/rotate/scales a unit object into the desired location/orientation/size
- We are just finding the inverse of M, which will bring the ray from world
coordinate back to object coordinate.
- The advantage is obvious, math is easier in the object coordinate space!
- As mentioned before, you need to find the smallest t-value from the
intersection test, you can use t in two ways:
- 𝑃 + 𝑡𝒅 gives the world coordinate location of the intersection point
- 𝑃 + 𝑡𝒅 is the corresponding intersection point in object coordinate
- Note that the t value doesn’t change between the two coordinate spaces!