Download reports for my cource Robot and more Summaries Computer science in PDF only on Docsity!
BỘ GIÁO DỤC & ĐÀO TẠO
TRƯỜNG ĐẠI HỌC SƯ PHẠM KỸ THUẬT TP.HỒ CHÍ MINH
KHOA ĐIỆN – ĐIỆN TỬ
BỘ MÔN TỰ ĐỘNG ĐIỀU KHIỂN
----------------- ⸙∆ ⸙----------------- ĐỒ ÁN ROBOT Ứng dụng xử lý ảnh và cánh tay robot 3 bậc tự do phân loại sản phẩm theo hình dạng GVHD : TS.Trần Đức Thiện SVTH : Lê Thành Long 21151125 SVTH : Nguyễn Chí Tâm 21151161 TP. HỒ CHÍ MINH – 12025
LỜI CẢM ƠN Chúng em xin bày tỏ lòng biết ơn sâu sắc đến thầy Trần Đức Thiện, người đã tận tình hướng dẫn và truyền đạt những kiến thức quý báu trong suốt quá trình thực tập và thực hiện đề tài "Thiết kế và mô phỏng robot 3 bậc tự do" này. Thầy không chỉ cung cấp những kiến thức nền tảng và chuyên sâu về cơ khí, điều khiển tự động và lập trình mà còn luôn sẵn lòng hỗ trợ, giải đáp những thắc mắc và định hướng cho chúng em trong từng bước nghiên cứu. Sự nhiệt tình và tâm huyết của thầy đã tạo động lực lớn giúp chúng em hoàn thành tốt bài báo cáo này. Những bài giảng, tài liệu và hướng dẫn của thầy đã giúp chúng em hiểu rõ hơn về tầm quan trọng của việc thiết kế và mô phỏng robot trong thực tiễn. Qua đó, chúng em đã học được cách áp dụng lý thuyết vào thực tế, từ việc thiết kế mô hình trên phần mềm SolidWorks đến việc mô phỏng và kiểm tra các thông số trong MATLAB Simulink. Chúng em xin chân thành cảm ơn thầy vì tất cả sự hỗ trợ và chỉ dẫn quý báu. Những kinh nghiệm và kỹ năng chúng em học được từ thầy sẽ là hành trang quý báu cho con đường học tập và sự nghiệp sau này. Kính chúc thầy luôn mạnh khỏe, hạnh phúc và tiếp tục thành công trong sự nghiệp giảng dạy và nghiên cứu Thành phố Hồ Chí Minh, ngày 5 tháng 1 năm 202 5 Nhóm thực hiện đề tài i
2.5.4 Kiểm chứng động học thuận
DANH SÁCH HÌNH ẢNH
- 2.5.3 Phần mềm MATLAB.......................................................................... - 2.5.5 Kiểm chứng động học nghịch............................................................. - 2.5.6 Tính toán & kiểm chứng quy hoạch quỹ đạo......................................
- 2.6 Không gian làm việc của robot..................................................................
- 2.7 Xử lý ảnh và phân loại hình dáng..............................................................
- 2.7.1 Thư viện OpenCV...............................................................................
- 2.7.2 Đọc ảnh từ Camera.............................................................................
- 2.7.3 Chuyển ảnh sang không gian màu......................................................
- 2.7.4 Tạo mặt nạ nhị phân (Binary Mask)...................................................
- 2.7.5 Áp dụng hình thái học để loại bỏ nhiêu..............................................
- 2.7.6 Tìm và xử lý các đường viền (Contours)............................................
- 2.7.7 Vẽ hình dạng và hiện tên vật thể.........................................................
- 2.7.8 Xác định tâm vật và calib tọa độ.........................................................
- 2.7.9 Hiển thị tọa độ tâm của vật.................................................................
- 2.7.10 Quy trình xử lí hình ảnh để nhận diện vật..........................................
- 2.8 Lưu đồ giải thuật........................................................................................
- 2.8.1 Lưu đồ giải thuật cho động học thuận & động học nghịch.................
- 2.8.2 Lưu đồ giải thuật cho phần xử lý ảnh & giao tiếp với arduino...........
- CHƯƠNG 3. THI CÔNG MÔ HÌNH...................................................................
- 3.1 Thiết kế phần cứng.....................................................................................
- 3.1.1 Thiết kế mô hình 3D...........................................................................
- 3.1.2 Kích thước tổng quan..........................................................................
- 3.1.3 Phạm vi hoạt động và tính toán chi tiết..............................................
- 3.2 Thiết kế hệ thống........................................................................................
- 3.2.1 Sơ đồ kết nối hệ thống:.......................................................................
- 3.3 Thiết kế phần mềm:....................................................................................
- 3.3.1 Giới thiệu phần mềm Pycharm...........................................................
- 3.3.2 Giới thiệu phần mềm Arduino IDE....................................................
- 3.3.3 Sơ đồ khối quá trình xử lí ảnh điều khiển robot.................................
- CHƯƠNG 4. KẾT QUẢ MÔ HÌNH HỆ THỐNG...............................................
- 4.1 Mô hình thực tế của hệ thống:....................................................................
- CHƯƠNG 5. KẾT LUẬN VÀ HƯỚNG PHÁT TRIỂN......................................
- 5.1 Kết luận......................................................................................................
- 5.2 Hạn chế của đề tài:.....................................................................................
- 5.3 Hướng phát triển........................................................................................
- TÀI LIỆU THAM KHẢO........................................................................................
- Hình 1: Một trong những ứng dụng cánh tay robot và xử lý ảnh...............................
- Hình 2: Động cơ step..................................................................................................
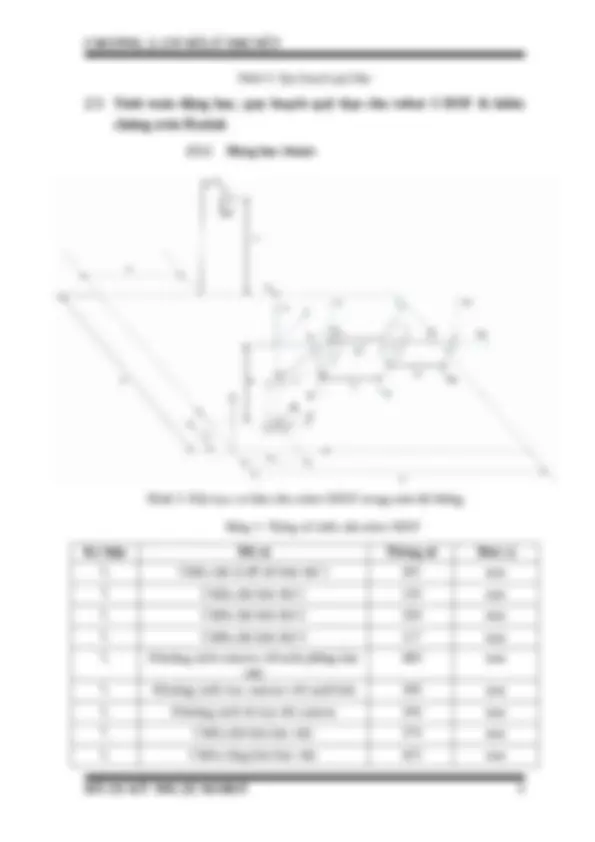
- Hình 3: Robot 3 DOF trên SOLIDWORK.................................................................
- Hình 4: Quy hoạch quỹ đạo........................................................................................
- Hình 5: Đặt trục cơ bản cho robot 3DOF....................................................................
- Hình 6: Phần mềm MATLAB...................................................................................
- Hình 7: Trục cho robot 3DOF...................................................................................
- Hình 8: Kiểm chứng động học thuận trường hợp 1..................................................
- Hình 9: Kiểm chứng động học thuận trường hợp 2..................................................
- Hình 10: Kiểm chứng động học nghịch trường hợp 1..............................................
- Hình 11: Kiểm chứng động học nghịch trường hợp 2..............................................
- Hình 12: Quy hoạch đa thức.....................................................................................
- Hình 13: Không gian làm việc của robot 3DOF.......................................................
- Hình 14 Flow Chart quy trình...................................................................................
- Hình 15: Lưu đồ giải thuật cho động học thuận.......................................................
- Hình 16: Lưu đồ giải thuật cho động học nghịch.....................................................
- Hình 17: Lưu đồ tiền xử lý Camera..........................................................................
- Hình 18: Lưu đồ tổng quát xử lý ảnh kết hợp điều khiển robot 3DOF.....................
- Hình 19: Lưu đồ xử lý ảnh........................................................................................
- Hình 20: Lưu đồ quy hoạch quỹ đạo.........................................................................
- Hình 21: Quy hoạch quỹ đạo cho các điểm..............................................................
- Hình 22: Lưu đồ điều khiển qua arduino động cơ step và nam châm điện...............
- Hình 23: Mô hình thiết kế trên SOLIDWORK.........................................................
- Hình 24: Thiết kế Khâu đế........................................................................................
- Hình 25: Bản vẽ 2D khâu đế.....................................................................................
- Hình 26: Bản vẽ 2D khâu 1.......................................................................................
- Hình 27: Bản vẽ 2D khâu 2.......................................................................................
- Hình 28: Bản vẽ 2D khâu 3.......................................................................................
- Hình 29: Mô hình tổng quát......................................................................................
- Hình 30: Sơ đồ kết nối điện......................................................................................
- Hình 31: Sơ đồ khối của Python...............................................................................
- Hình 32: Sơ đồ khối của Arduino.............................................................................
- Hình 33: Mô hình thực tế sau khi đã lắp ráp hướng ngang.......................................
- Hình 34: Mô hình thực tế sau khi đã lắp ráp hướng từ trên xuống...........................
- Hình 35: Tổng quan mô hình thực tế sau khi đã lắp ráp...........................................
CHƯƠNG 1. TỔNG QUAN ĐỀ TÀI
CHƯƠNG 1. TỔNG QUAN ĐỀ TÀI
1.1 Đặt vấn đề
1.1.1 Lý do thực hiên đề tài Trong cuộc cách mạng công nghiệp 4.0, tự động hóa đang đóng vai trò quan trọng trong việc nâng cao hiệu quả sản xuất và dịch vụ. Ở các nhà máy hiện đại, các quy trình như phân loại, lắp ráp và vận chuyển được thực hiện tự động nhờ các hệ thống robot tiên tiến. Việc sử dụng robot giúp giảm thiểu sự phụ thuộc vào lao động thủ công, tăng năng suất và đảm bảo chất lượng sản phẩm nhờ khả năng hoạt động ổn định, chính xác và nhanh chóng. Một trong những ứng dụng phổ biến của tự động hóa là phân loại sản phẩm dựa trên hình dáng. Việc phân loại theo hình dáng đóng vai trò quan trọng trong nhiều ngành công nghiệp, bao gồm chế biến thực phẩm, sản xuất linh kiện điện tử và đóng gói hàng hóa. Các hệ thống robot phân loại theo hình dáng có thể thay thế con người trong những công việc lặp đi lặp lại, giúp giảm thiểu sai sót và đẩy nhanh tốc độ quy trình. Robot phân loại theo hình dáng có thể nhận biết các đặc điểm như chiều dài, bề ngang, độ cong hay góc cạnh của sản phẩm, từ đó sắp xếp chúng vào các nhóm phù hợp một cách chính xác và nhanh chóng. Ứng dụng của robot trong phân loại theo hình dáng không chỉ giúp các nhà máy hoạt động hiệu quả hơn mà còn giảm thiểu chi phí, nâng cao chất lượng sản phẩm và cải thiện an toàn lao động khi công nhân không phải trực tiếp thực hiện các công việc lặp lại. Hình 1 : Một trong những ứng dụng cánh tay robot và xử lý ảnh ĐỒ ÁN KỸ THUẬT ROBOT 1
CHƯƠNG 1. TỔNG QUAN ĐỀ TÀI
1.1.2 Ứng dụng kết hợp giữa Robot và công nghệ xử lý ảnh Sự kết hợp giữa công nghệ robot và xử lý ảnh đang mang lại các giải pháp tự động hóa thông minh, trong đó nổi bật là hệ thống cánh tay robot phân loại vật thể dựa trên hình dạng. Hệ thống này giúp nâng cao hiệu quả, độ chính xác trong sản xuất, đồng thời giảm gánh nặng lao động thủ công. Đề tài “Ứng dụng xử lý ảnh và cánh tay robot 3 bậc tự do phân loại vật thể theo hình dạng” hướng đến nghiên cứu và phát triển hệ thống robot tự động, tích hợp xử lý ảnh để nhận diện và phân loại vật thể chính xác. Với tiềm năng ứng dụng cao trong công nghiệp, đề tài không chỉ phục vụ học tập, nghiên cứu về động học và điều khiển robot mà còn trang bị kỹ năng lập trình và sử dụng công cụ như SolidWorks, MATLAB, và Python. Dự án cung cấp cơ hội thực hành từ thiết kế lộ trình chuyển động, tính toán không gian làm việc đến phát triển hệ thống điều khiển, giúp chúng em ứng dụng công nghệ vào thực tế và phát triển năng lực nghiên cứu chuyên sâu.
1.2 Mục tiêu đề tài
Mục tiêu chính của đề tài là thiết kế và chế tạo một mô hình cánh tay robot 3 bậc tự do (3-DOF), mô phỏng được các chuyển động cơ bản trong không gian ba chiều và có khả năng phân loại vật thể theo màu sắc thông qua hệ thống xử lý ảnh. Các mục tiêu cụ thể gồm:
- Thiết kế và xây dựng mô hình robot 3-DOF : Tạo bản vẽ trên phần mềm SolidWorks và chế tạo phần cơ khí, đảm bảo robot có khả năng di chuyển linh hoạt và chính xác.
- Tính toán và kiểm tra động học của robot : Sử dụng các phương pháp tính toán động học thuận và động học nghịch để xác định vị trí và góc quay của các khớp.
- Phát triển hệ thống xử lý ảnh để nhận dạng màu sắc : Áp dụng các thuật toán nhận diện màu sắc trong không gian màu HSV, từ đó gửi thông tin đến bộ điều khiển để thực hiện thao tác phân loại.
- Xác định không gian làm việc và thiết kế quỹ đạo di chuyển : Sử dụng mô phỏng để xác định các điểm mà robot có thể tiếp cận, đảm bảo sự chính xác trong các thao tác phân loại.
- Lập trình và xây dựng giao diện điều khiển : Sử dụng ngôn ngữ lập trình Python để xây dựng giao diện người dùng, hỗ trợ điều khiển robot qua các lệnh và góc quay. ĐỒ ÁN KỸ THUẬT ROBOT 2
CHƯƠNG 1. TỔNG QUAN ĐỀ TÀI
tích hình ảnh thu được từ camera, từ đó gửi dữ liệu đến bộ điều khiển để thực hiện thao tác phân loại chính xác
- Phát triển giao diện điều khiển: Lập trình giao diện trên Python để người dùng có thể điều khiển robot thông qua các nút lệnh và nhập tọa độ.
1.5 Phương pháp nghiên cứu
Để đạt được mục tiêu đề ra, đề tài sử dụng các phương pháp nghiên cứu kết hợp giữa lý thuyết và thực nghiệm. Trước hết, phương pháp phân tích tài liệu được áp dụng nhằm tổng hợp kiến thức về robot 3 bậc tự do (3 DOF), các hệ thống phân loại sản phẩm và công nghệ xử lý ảnh từ các tài liệu chuyên ngành, bài báo khoa học. Tiếp theo, phương pháp thiết kế và mô phỏng được sử dụng để phát triển mô hình cơ khí của robot 3 DOF, xây dựng thuật toán và thử nghiệm các thuật toán xử lý ảnh trong môi trường ảo trước khi thực nghiệm trên phần cứng. Phương pháp thực nghiệm là trọng tâm, bao gồm việc triển khai robot thực tế, cài đặt và tích hợp các động cơ, camera xử lý ảnh, bộ điều khiển. Đồng thời, các thuật toán xử lý ảnh và điều khiển được hiệu chỉnh thông qua các thử nghiệm phân loại sản phẩm. Ngoài ra, phương pháp phân tích và đánh giá kết quả được áp dụng để so sánh kết quả thực nghiệm với mục tiêu đề ra, xác định những hạn chế của hệ thống và đề xuất hướng cải tiến. Việc kết hợp các phương pháp này đảm bảo tính khoa học và khả năng thực tiễn của nghiên cứu. ĐỒ ÁN KỸ THUẬT ROBOT 4
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT
2.1 Cơ sở lý thuyết về Lực, Torque và phương pháp cánh tay đòn
Lực là bất kì ảnh hưởng nào làm cho một vật thể chịu sự thay đổi về hình dạng hay làm ảnh hưởng đến chuyển động của nó. Nói cách khác lực là nguyên nhân làm cho một vật có khối lượng thay đổi vận tốc hay làm biến dạng vật thể. Một số ví dụ đơn giản về lực: Khi bạn đá quả bóng, bạn tác động một lực lên nó. Khi bạn ngồi xuống, bạn chịu tác động của lực hấp dẫn trái đất. Mặt trăng chịu lực hấp dẫn Trái Đất nên xoay quanh Trái Đất với một quỹ đạo nhất định, ... Tóm lại lực nó có thể làm thay đổi hình dạng hoặc cấu trúc của một vật thể tùy vào độ lớn và phương, chiều của lực. Trong khi lực tác động lên một vật sẽ tạo cho vật một chuyển động thẳng, tịnh tiến, thì Torque được định nghĩa là khuynh hướng của lực làm xoay một vật quanh một trục cố định. Nói nôm na Torque cũng tương tự như lực nhưng sẽ tạo chuyển động xoay cho vật. Một ví dụ đơn giản: Ta muốn xoay một con ốc nhưng nếu sử dụng tay vặn thông thường sẽ khó có thể mở con ốc ra, do đó ta sẽ dùng cờ lê để vặn ốc ra như ta tác động một lực vào cờ lê và cờ lê có độ dài là d, d này được coi là cánh tay đòn, giúp cho việc vặn ốc trở nên dễ dàng hơn. Ta có công thức tính Torque xoay quanh trục của con ốc là: (2.1) Theo như công thức độ lớn của τ sẽ tỉ lệ thuận với lực F tác động và độ dài cánh tay đòn d. Với một lực cố đinh, cánh tay đòn càng dài thì τ sẽ càng lớn. ĐỒ ÁN KỸ THUẬT ROBOT 5
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT
2.3 Tổng quan về robot 3 bậc
Hình 3 : Robot 3 DOF trên SOLIDWORK Robot 3 bậc tự do (3 DOF) là một dạng robot công nghiệp phổ biến, được thiết kế với ba bậc tự do bao gồm hai chuyển động quay và một chuyển động tịnh tiến. Với cấu trúc đơn giản, robot này có khả năng thao tác chính xác và linh hoạt trong không gian ba chiều, thường được ứng dụng trong các ngành công nghiệp đòi hỏi tốc độ và độ chính xác cao như lắp ráp, đóng gói, và xử lý vật liệu. Điểm nổi bật của robot 3 DOF là sự tối ưu trong chuyển động trên mặt phẳng (XY) và khả năng duy trì độ ổn định trong phương thẳng đứng (Z), giúp nó thích nghi tốt với các nhiệm vụ trong không gian làm việc hạn chế. Cấu trúc cơ bản của robot bao gồm một đế cố định, hai khớp quay để điều hướng trên mặt phẳng và một trục tịnh tiến để thay đổi độ cao. Nhờ thiết kế nhỏ gọn, dễ vận hành và chi phí hợp lý, robot 3 DOF đã trở thành một lựa chọn lý tưởng trong các dây chuyền sản xuất tự động hóa hiện đại, đáp ứng nhu cầu về hiệu suất và tính kinh tế. ĐỒ ÁN KỸ THUẬT ROBOT 7
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT
2.4 Lý thuyết về động học robot
2.4.1 Động học thuận Động học thuận (Forward Kinematics) là quá trình xác định vị trí và hướng của đầu cánh tay robot dựa trên các thông số đầu vào là góc quay hoặc chuyển động tịnh tiến tại các khớp. Bằng cách sử dụng thông số điều khiển đã biết ở từng khớp, ta có thể tính toán vị trí và phương hướng của điểm đầu cuối (end-effector) trong không gian 3 chiều. Kết quả từ động học thuận thường được sử dụng để lập trình robot thực hiện các nhiệm vụ định trước, trong đó thông tin về các góc khớp đã được cung cấp. 2.4.2 Động học nghịch Động học nghịch (Inverse Kinematics) là bài toán tính toán ngược so với động học thuận, nhằm tìm ra các thông số khớp (góc quay hoặc khoảng cách tịnh tiến) cần thiết để đưa điểm đầu cuối của robot đến một vị trí và hướng mong muốn. Khi vị trí và hướng cụ thể của end-effector đã được xác định, động học nghịch giúp tính toán các góc khớp phù hợp để đạt được trạng thái đó. Quá trình này thường được sử dụng trong điều khiển robot để đưa end-effector đến các vị trí đích chính xác trong không gian làm việc. 2.4.3 Quy hoạch quỹ đạo Quy hoạch quỹ đạo là một phần nhỏ của một vấn đề tổng thể như là dẫn đường (navigation) hay quy hoạch chuyển động (Motion planning). Hệ thống cấp bậc điển hình cho quy hoạch chuyển động như sau:
- Task planning – Thiết kế một vài mục tiêu. (Ví dụ như nhặt đồ vật trước mặt bạn lên, gắp vật, thả vật, hàn, …)
- Path planning – Đưa ra đường dẫn khả thi từ điểm đầu đến điểm cuối. Một đường dẫn luôn bao gồm tập hợp của các điểm tham chiếu.
- Trajectory planning – Đưa ra lịch trình theo thời gian làm sao để di chuyển theo đường dẫn mà có tính ràng buộc ví dụ như vị trí, vận tốc, gia tốc
- Trajectory following – Khi kế hoạch đã được lên thì cần một hệ thống đều khiển để cho kế hoạch có thể di chuyển đấy đủ và chính xác nhất. ĐỒ ÁN KỸ THUẬT ROBOT 8
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT
l 9 Tọa độ X đặt robot so với góc bàn 250 mm l 1 0 Tọa độ Y đặt robot so với góc bàn 180 mm D 1 Khoảng cách giữa trục link 1 và link 2 -31 mm Bảng 2 : Bảng DH
i ai − 1 αi − 1 di θi
1 0 0 l 0 θ₁ 2 l 1 90 0 θ₂
3 l 2 0 0 θ₃
Bảng 3 : Giải thích ký hiệu bảng DH
αi − 1 Góc giữa trục zi và zi + 1 được tính toán quanh trục xi
ai − 1 Khoảng cách giữa trục zi và zi + 1 được đo theo trục xi
di Khoảng cách giữa trục xi và xi − 1 được đo theo trục zi
θi Góc giữa trục xi và xi − 1 được tính toán quanh trục zi
Ta có ma trận chuyển đổi giữa hệ tọa độ sang hệ tọa độ là: 111 Equation Chapter (Next) Section 1 212 Equation Chapter (Next) Section 1 313 Equation Chapter (Next) Section 1 (2.2) Trong đó: = cos( ); = sin( ); = cos( ); = sin ( ) Từ công thức (1.1) ta tìm ma trận chuyển đổi hệ trục tọa độ {1} sang hệ trục tọa độ {0}: 1^ T 0 = [ c 1 − s 1 0 0 s 1 c 1 0 0 0 0 1 l 0 0 0 0 1 ]
ĐỒ ÁN KỸ THUẬT ROBOT 10
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT
Ma trận chuyển đổi hệ trục tọa độ {2} sang hệ trục tọa độ {1}: 2^ T 1 =
[
c 2 − s 2 0 0 0 0 − 1 0 s 2 c 2 0 0 0 0 0 1
]
Ma trận chuyển đổi hệ trục tọa độ {3} sang hệ trục tọa độ {2}: 3^ T 2 =
[
c 3 − s 3 0 l 2 s 3 c 3 0 0 0 0 1 0 0 0 0 1
]
Ma trận chuyển đổi hệ trục tọa độ {3} sang hệ trục tọa độ {0}: 3^ T 0 = 1 T 0 2 T 1 3 T 2 =
[
c 23 c 1 − s 23 c 1 s 1 c 1 ( l 1 + l 2 c 2 ) c 23 s 1 − s 23 s 1 − c 1 s 1 ( l 1 + l 2 c 2 ) s 23 c 23 0 l 0 + l 2 s 2 0 0 0 1
]
Biểu diễn vị trí điểm EE trong hệ tọa độ {3}: ¿
[
l 3 0
D 1 ]^
Biểu diễn vị trí điểm EE trong hệ tọa độ {0}:
[ 1 ]= 3 T
0
[ 1 ]=
[
c 1 ( l 1 + l 3 c 23 + l 2 c 2 ) + s 1 D 1
s 1 ( l 1 + l 3 c 23 + l 2 c 2 )− c 1 D 1
l 0 + l 3 s 23 + l 2 s 2 1
]
Trong đó và 2.5.2 Động học nghịch Từ phương trình (2.8) ta tiến hành đặt x, y, z theo lần lượt như sau: (2.9) (2.10) ĐỒ ÁN KỸ THUẬT ROBOT 11