Download Rigid Objects and Torque - General Physics I - Lecture Slides and more Slides Physics in PDF only on Docsity!
Rigid Objects & Torque
Torque is a vector quantity that represents the application of
force to a body resulting in rotation
(or change in rotational state)
Definition: •^
The SI units for torque are N
. m
(not to be confused with joules)
•^
Torque depends on:– The Lever arm (leverage),– The component of force perpendicular to lever arm,
r
^
= F r =
F sin
r
^
ˆ
F =
F sin
i
^
F r
r
F
Docsity.com
Newton’s 2
nd
Law
(for Rotational Motion)
When there is a net torque exerted on a rigid body its stateof rotation (
) will change depending on:
Amount of net torque,
Rotational inertia of object,
I
Note:
No net torque means
= 0 and
= constant}
Alternatively, the net torque exerted on a body is equal tothe product of the rotational inertia and the angularacceleration:
This is Newton’s 2
nd
Law (for rotation)!!
n
1
2
i
i=
=
= I
^
^
^
n
1
2
i i=
1
=
=
=
I^
I^
I
^
^
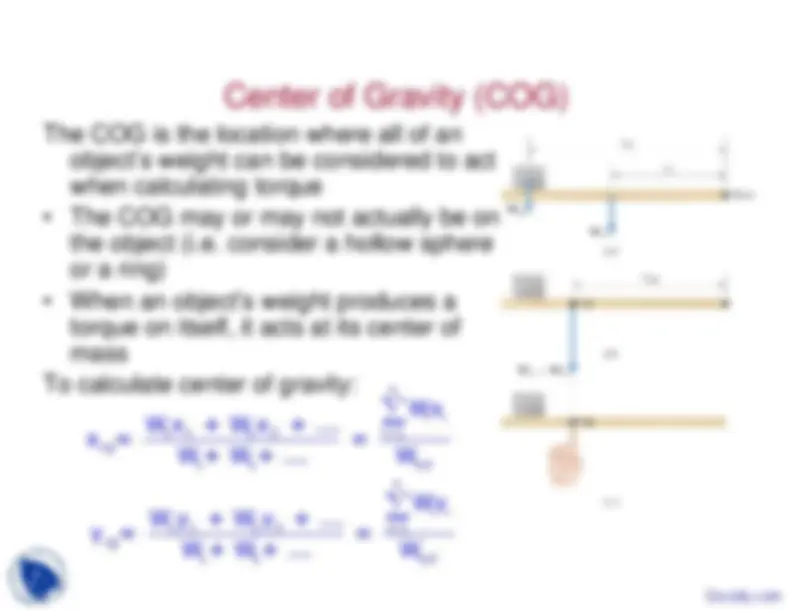
Center of Gravity (COG)
The COG is the location where all of an
object’s weight can be considered to actwhen calculating torque
-^
The COG may or may not actually be onthe object (i.e. consider a hollow sphereor a ring)
-^
When an object’s weight produces atorque on itself, it acts at its center ofmass To calculate center of gravity:
n
i^
i
1
1
2
2
i=
cg
1
2
Wx tot
W x
x^
=
=
W + W + ...
W^ n
i^
i
1
1
2
2
i=
cg
1
2
Wy tot
W y
y^
=
=
W + W + ...
W
Moment of Inertia
The resistance of a rigid body to changes in its state ofrotational motion (
) is called the moment of inertia
(^ or
rotational inertia)The Moment of Inertia (I) depends on:
Mass of the object, m
The axis of rotation
Distribution (position) of mass about the axis of rotation
Definition
(For a discrete distribution of mass):
Where:
m
is the mass of a small segment of the object i r^ i^
is the distance of the mass mi from the axis of rotation
The SI units for
I
are kg
.m
2
Note:
For a continuous distribution of mass there are more
sophisticated techniques for calculating the moment of inertia
n
2
2
2
2
1 1
2 2
n n
i i
i=
I = m r
=
mr
ω
Moment of Inertia (common examples, cont.)
A hollow sphere:
A solid sphere:
A thin rod:
.^
m
2
rod
mL
I^
=
12
m R
m R
2
hollow sphere
2mR
I^
=
3
2
solid sphere
2mR
I^
=
5
L
The Parallel Axis Theorem
-^
The Parallel Axis Theorem is used to determine themoment of inertia for a body rotated about an axis adistance, l, from the center of mass: Example:
A 0.2 kg cylinder (r=0.1 m) rotated about an
axis located 0.5 m from its center:
2
cm
I = I
L
^
2
cm
2
2
2
2
I = I
I =
2
I =
kg m
I = 0.052 kg m
Rolling objects & Inclined Planes
Consider a solid disc & a hoop rolling down a hill (inclined plane):1.
Apply Newton’s 2
nd
Law
(force)
to each object
Apply Newton’s 2
nd
Law
(torque)
to each object
What is the acceleration of each object as they roll down thehill?
Which one reaches the bottom first?
Soliddisc
Hoop
Angular Momentum
•^
Angular momentum is the rotational analog of linearmomentum
-^
It represents the “quantity of rotational motion” for an object(or its inertia in rotation)
-^
Angular Momentum (a vector we will treat as a scalar) isdefined as:
L =
I
•^
Note:Angular Momentum is related to Linear Momentum:
L = r
.p sin
r is distance from the axis of rotation p^
is the linear momentum ^
is the angle between r and
p
•^
SI units of angular momentum are kg
.m
2 /s
r
p
Conservation of Angular Momentum
(Examples)
-^
A figure skater
-^
A high diver
-^
Water flowing down a drain
Archimedes
(287-212 BC)
•^
Possibly the greatest mathematician inhistory
-^
Invented an early form of calculus
-^
Discovered the Principle of Buoyancy
(now
called Archimedes’ Principle)
-^
Introduced the Principle of Leverage(Torque)
and built several machines based
on it.
“Give me a point ofsupport and I willmove the Earth”