



Mechanics
Physics 151
Lecture 10
Rigid Body Motion
(Chapter 5)










Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Mechanics, Physics, Rigid Body Motion, Diagonalizing Inertia Tensor, Principal Axes, Finding Principal Axes, Rotational Equation of Motion, Euler’s Equation of Motion, Torque-Free Motion, Inertia Ellipsoid, Invariable Plane, Rotation Under Torque Lagrangian.
Typology: Study notes
1 / 23

This page cannot be seen from the preview
Don't miss anything!
Rigid Body Motion
(Chapter 5)
What We Did Last Time!
!
Used it to find Coriolis effect
!
!
!
Often possible if body axes are defined from the CoM
!
!
Calculated angular momentumand kinetic energy
s
r
d
d
dt
dt
ω
(
)
2
j
k
i
i
jk
ij
ik
m
r
x x
ω
2
ω
ω
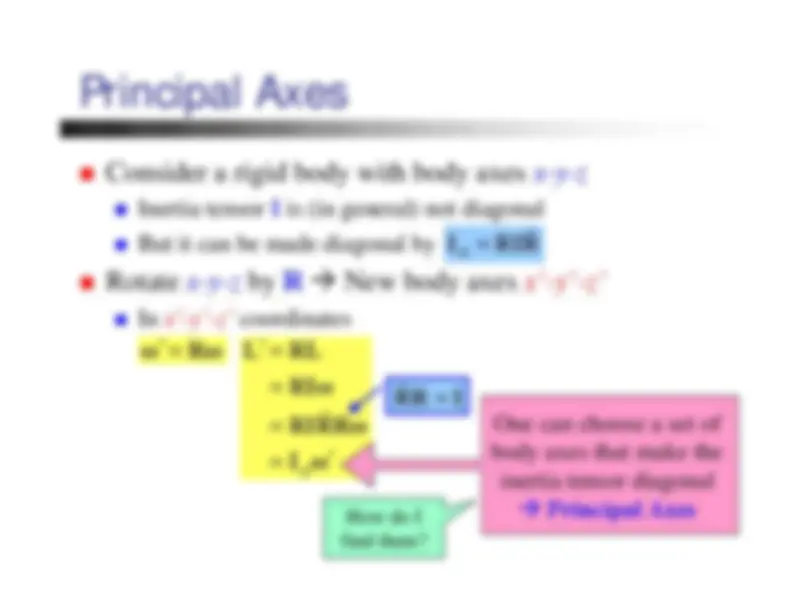
Principal Axes!
!
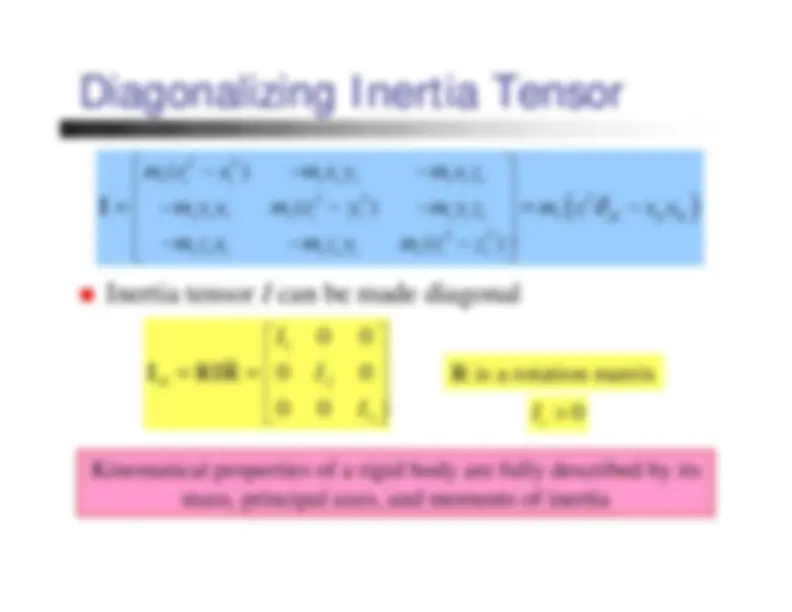
Inertia tensor
is (in general) not diagonal
!
But it can be made diagonal by
!
!
In
x’-y’-z’
coordinates
D
ω
ω
D
ω
ω
ω
One can choose a set of
body axes that make the
inertia tensor diagonal
Principal Axes
How do I
find them?
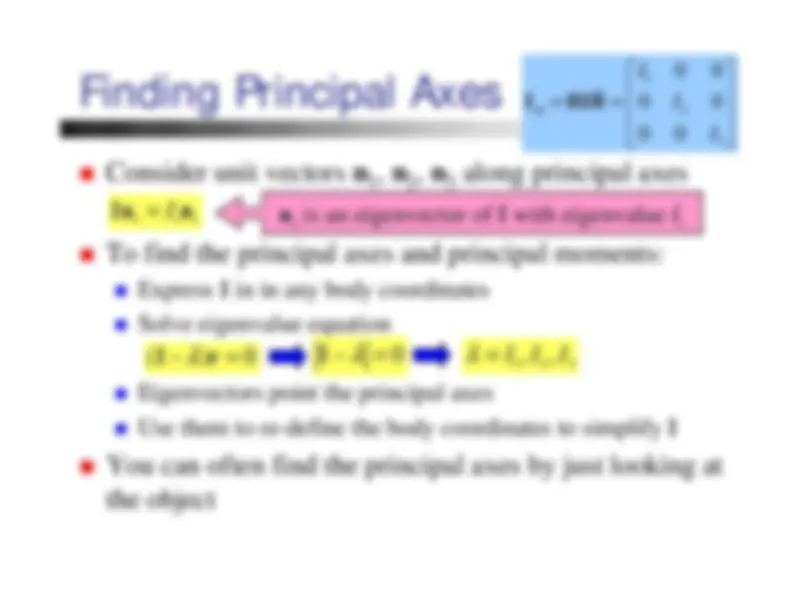
Finding Principal Axes!
1
2
3
!
!
Express
in in any body coordinates
!
Solve eigenvalue equation
!
Eigenvectors point the principal axes
!
Use them to re-define the body coordinates to simplify
!
i
i
i
In
n
1
2
3
0
0
0
0
0
0
D
I
I
I
=
=
I
RIR
!
n
i
is an eigenvector of
with eigenvalue
i
r
λ
1
2
3
Euler’s Equation of Motion
!
Special cases:
!!
1
1
1
1
1
1
2
2
2
2
2
2
3
3
3
3
3
3
d
dt
1
1
2
3
2
3
1
2
2
3
1
3
1
2
3
3
1
2
1
2
3
2
3
1
1
1
ω =
2
3
1
1
1
ω =
Torque-Free Motion
!
No linear force
Conservation of linear momentum
!
No torque
Conservation of angular momentum
!
!
!
Geometrical trick by L. Poinsot
1
1
2
3
2
3
2
2
3
1
3
1
3
3
1
2
1
2
Integrating these equation will give usenergy and angular momentumconservation
Inertia Ellipsoid
n
ρ
x
y
z
1
2
3
ρ
Inertia ellipsoid represents
the moment of inertia of a
rigid body in all directions
2
2
2
1
1
2
2
3
3
Usefulness of this
definition will become
apparent soon …
Inertia Ellipsoid!
!
!
ρ
Inertia ellipsoid
!
Normal of the ellipsoidgiven by the gradient
!
Using
n
ρ
n In
2
2
2
1
1
2
2
3
3
ρ
ρ
ρ
F
= 1
ρ
ρ
ρ
ρ
ρ
n
ω
ρ
Surface of the
inertia ellipsoid is
perpendicular to
L
Invariable Plane!
!
Distance between the center and the plane is
!
!
Tip of the
ρ
vector is momentarily at rest in space
!
i.e. it’s not sliding, butrolling without slippingon the invariable plane
Determined by the initial conditions
ρ
d
dt
ρ
ω
ω
ω
ρ
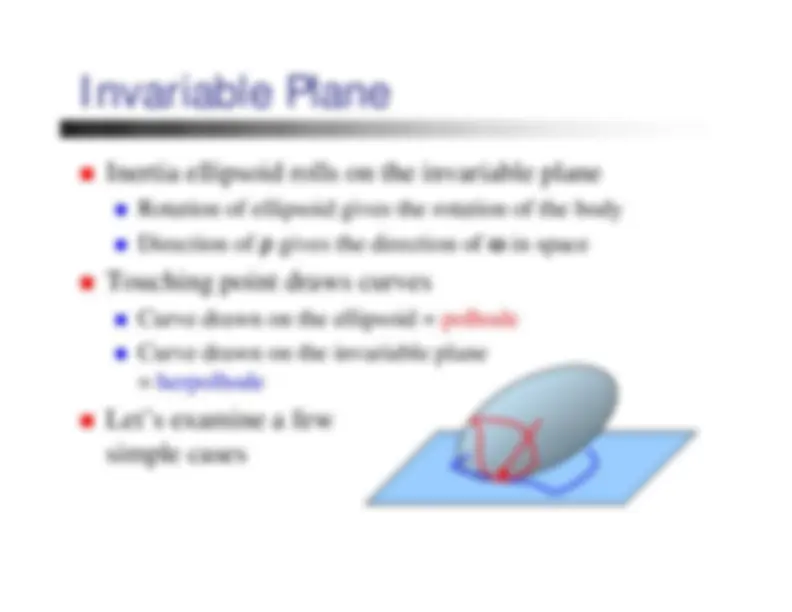
Invariable Plane!
!
Rotation of ellipsoid gives the rotation of the body
!
Direction of
ρ
gives the direction of
ω
in space
!
!
Curve drawn on the ellipsoid = polhode
!
Curve drawn on the invariable plane= herpolhode
!
Simple Cases!
!
Assume
1
2
3
!
Stable rotation around
1
and
3
!
Not so obvious around
2
!
If
1
3
2
is constant
!
Small deviation leads to instability
1
3
1
1
2
3
2
3
2
2
3
1
3
1
3
3
1
2
1
2
Simple Cases
!
Since
1
2
3
, distance
allows a polhode that
wraps around the inertia ellipsoid
!
2
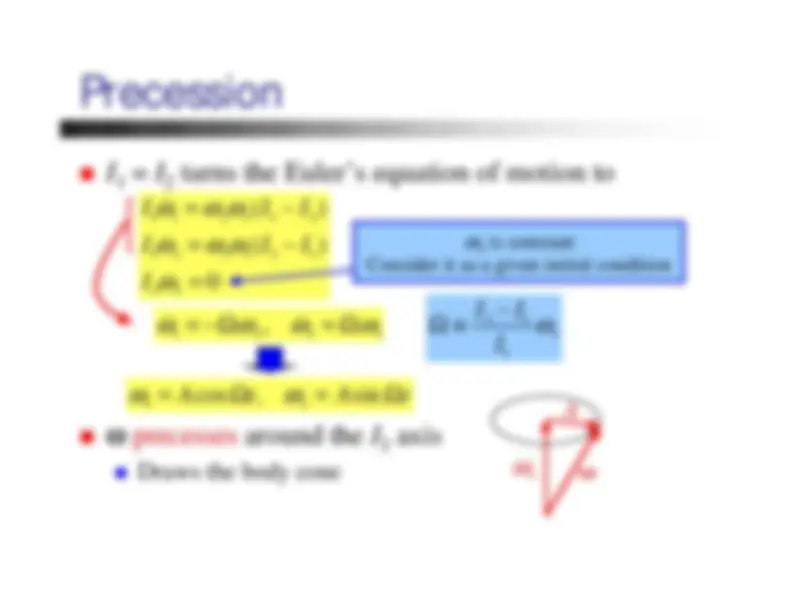
Precession!
1
2
!
3
!
Draws the body cone
1
1
2
3
1
3
1
2
3
1
3
1
3
3
ω
3
is constant
Consider it as a given initial condition
1
2
2
1
3
1
3
1
1
2
cos
sin
t
t
3
ω
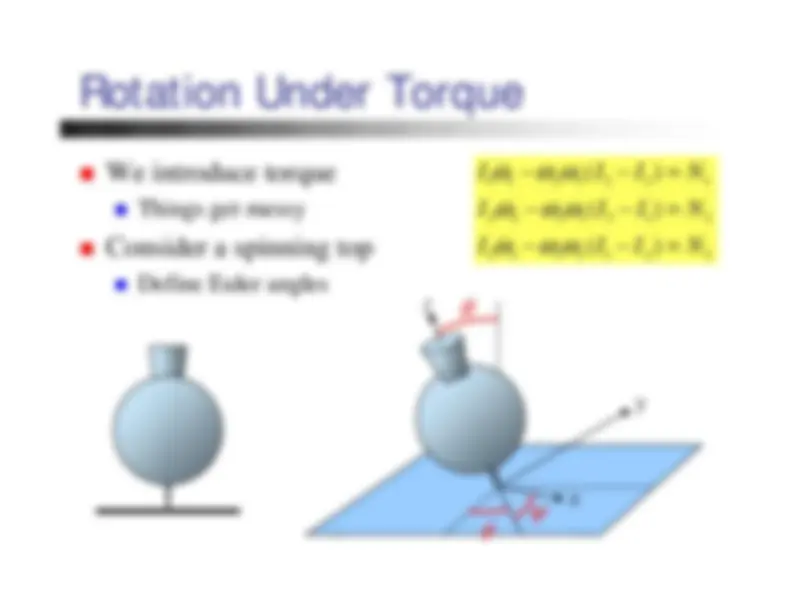
Rotation Under Torque!
!
Things get messy
!
!
Define Euler angles
1
1
2
3
2
3
1
2
2
3
1
3
1
2
3
3
1
2
1
2
3
z
y
x
φ