Download Robotics Manipulation and Control: An Introduction to Industrial Robots and more Essays (university) Robotics in PDF only on Docsity!
Robotics
Manipulation and control
University of Strasbourg Telecom Physique Strasbourg, ISAV option Master IRIV, AR track Introduction
Outline of the lecture
Introduction : Overview
1. Theoretical background
◦ 1.1. Rigid motions ◦ 1.2. Kinematics ◦ 1.3.Velocity Kinematics
2. Modeling kinematics
◦ 2.1. Denavit-Hartenberg convention ◦ 2.2. Forward kinematic model ◦ 2.3. Inverse kinematic model
Outline of the lecture
5. Control
◦ 5.1. Joint position control ◦ 5.2. Path planning ◦ 5.3. Software architecture
Outline of the introduction
1. History and definitions
2. Categories of robots
3. Specific vocabulary
4. Robot main characteristics
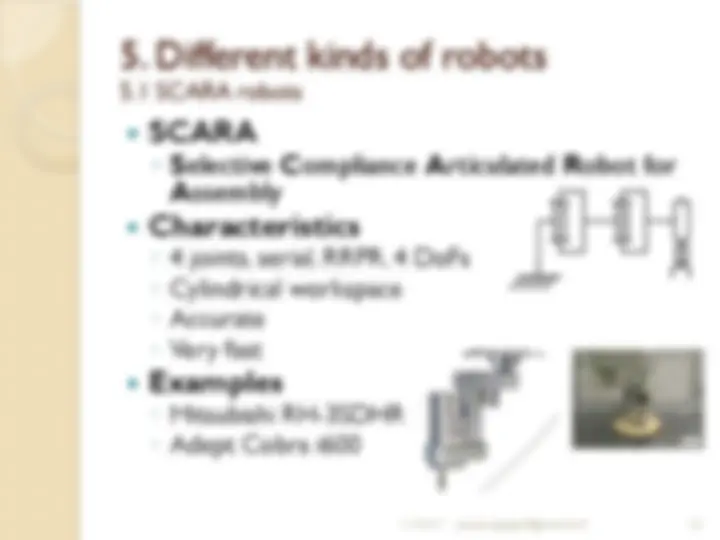
5. Different kinds of manipulators
6. Robot usage
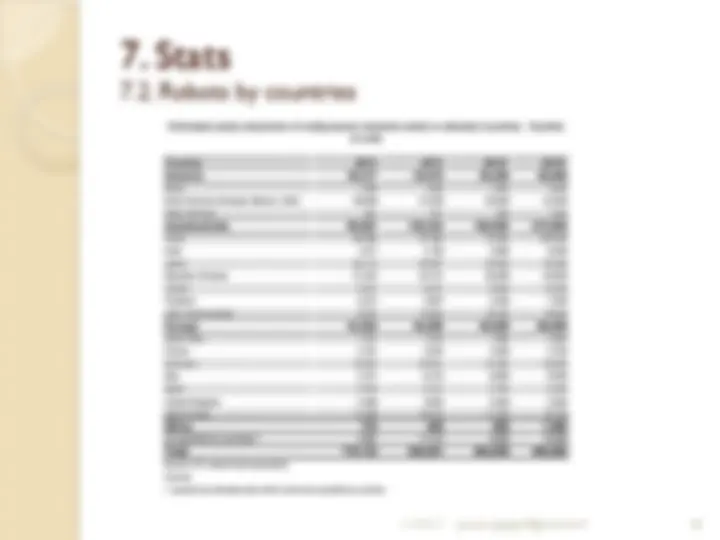
7. Statistics
8. References
1. History and definitions
Short history
◦ 1939 : “ Elektro ”, humanoid robot presented at the world fair in New- York from the Westinghouse Electric Corporation. ◦ 1956 : “ Unimate ”, first commercial industrial manipulator from the Unimation Company. It was first installed in 1961 in a General Motors plant. ◦ 1973 : “ Famulus ”, first 6 axis industrial robot from KUKA robotics.
1. History and definitions
Definition
◦ A robot is a mechanical articulated and actuated system controlled by a computer.
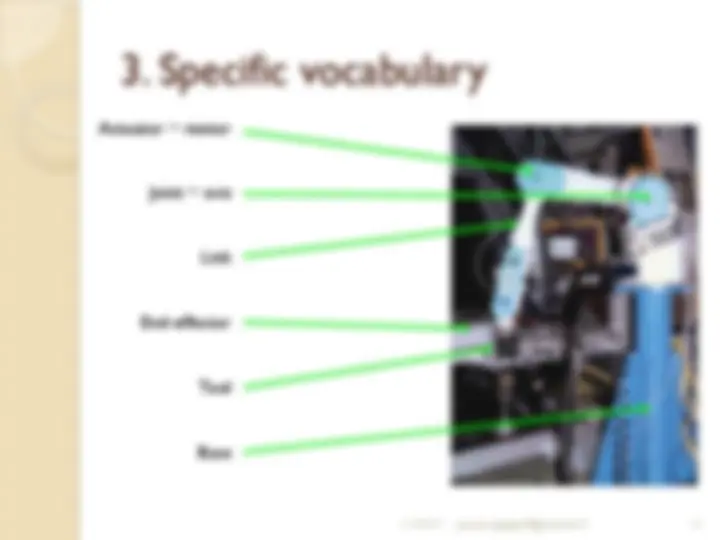
3. Specific vocabulary
Actuator = motor Joint = axis Link End-effector Tool Base
- Robot main characteristics 4.1 Geometry
Two types of joint
◦ Translational / prismatic : ◦ Rotational :
Geometric characteristics
◦ Number of joints ◦ Architecture (serial or parallel) ◦ Joint sequence ◦ Number of degrees of freedom 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2 1 2
- Robot main characteristics 4.1 Geometry Examples ◦ 3 joints, serial, RRR, 3DoF ◦ 3 joints, serial, PPP, 3DoF ◦ 4 joints, parallel, RP+RP, 3DoF
- Robot main characteristics 4.2 Workspace Definitions ◦ Reachable workspace : whole set of points reachable by a point on the end-effector, usually the tool center point. ◦ Dexterous workspace : whole set of points that a point on the end-effector can reach without limitation in its orientation.
- Robot main characteristics 4.3 Accuracy / Repeatability Definitions ◦ Accuracy : how closely the robot can reach a reference position in its workspace. ◦ Repeatability : how closely a robot can return to a previously learned position in its workspace. Notes ◦ The repeatability of a robot is usually far better than its accuracy. ◦ The vast majority of installed robots is used to cyclically repeat a programmed sequence of positions. ◦ The norm ISO 9283 specifies the conditions of assessment of the repeatability. It should be measured at maximal payload.
- Robot main characteristics 4.4 Dynamic performances Maximal velocity ◦ Given for each joint and also sometimes for the end-effector in the most favourable case. Maximal acceleration ◦ Given for each joint in the most unfavourable case ( i.e. in the maximal inertia configuration). ◦ Usually, an industrial robot is in an acceleration/deceleration state most of the time. The joints have rarely the time to reach their maximum velocity.
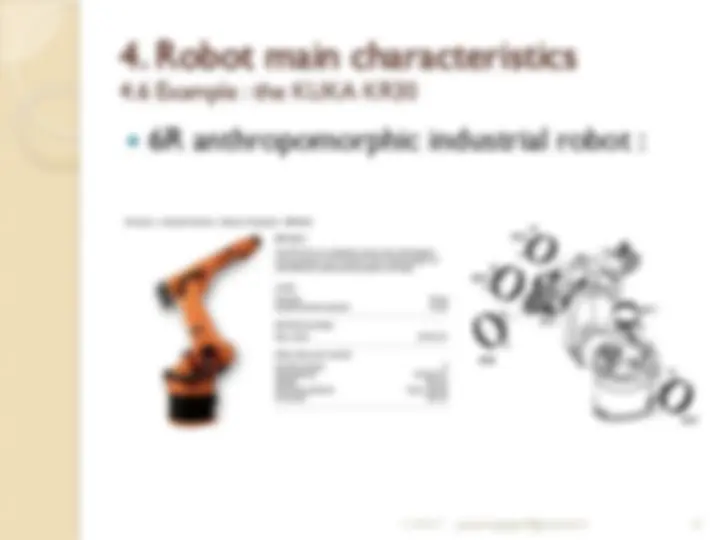
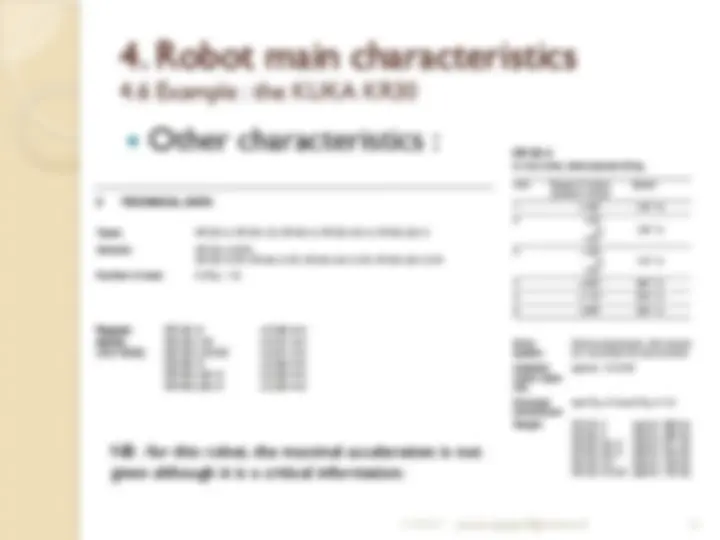
- Robot main characteristics 4.6 Example : the KUKA KR 6R anthropomorphic industrial robot :
- Robot main characteristics 4.6 Example : the KUKA KR Workspace :