


1ENGINEERING
EDUCATION
ENGE1024
Fall 2008
Engineering Exploration
Pre-workshop assignment
Robotics (Mechatronics)
Please use OneNote to answer the questions.
Due: 5 PM, Tuesday, October 14, 2008













Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
A pre-workshop assignment for a robotics course in the mechatronics engineering program. It includes information on the analogy between water flow and electricity, the design and function of a two-wheeled robot, and the importance of gears in transferring torque and rotational speed. Students are asked to answer questions related to these topics and complete calculations using the provided information.
Typology: Assignments
1 / 26

This page cannot be seen from the preview
Don't miss anything!
1
2
ENGINEERINGEDUCATION
4
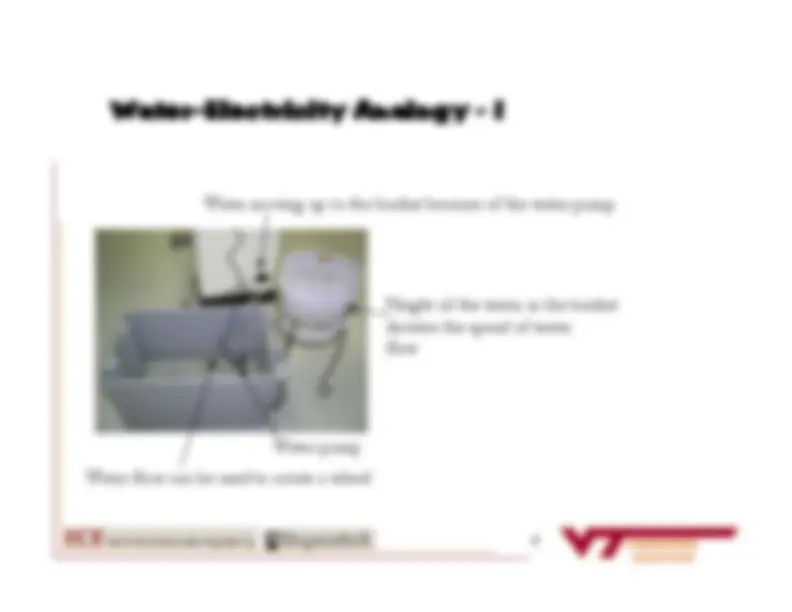
Water-Electricity Analogy - I
5
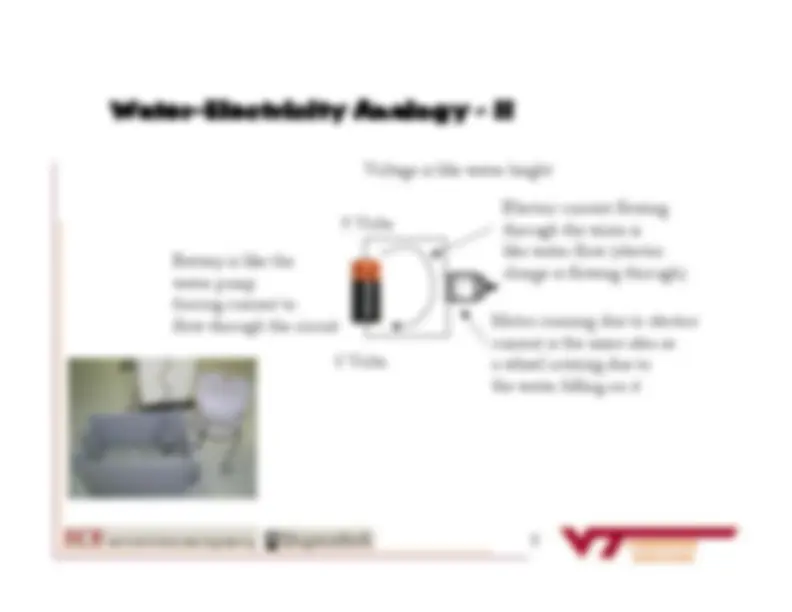
Water-Electricity Analogy - II
DCMotor
7
ENGINEERINGEDUCATION
Robot Description
(1) Motor rotation causes (2) Gear rotation causes (3) Wheel rot(1) Motor rotation causes (2) Gear rotation causes (3) Wheel rotation
ation
Greater the voltage appliedto the motor, higher itsangular speed
8
Why We Need Gears – Part I Can lift or push only 50 N
Effort (50 N) Load (500 N)
Length ratio1:
10
ENGINEERINGEDUCATION
What is Torque
11
Why We Need Gears – Part II
13
ENGINEERINGEDUCATION
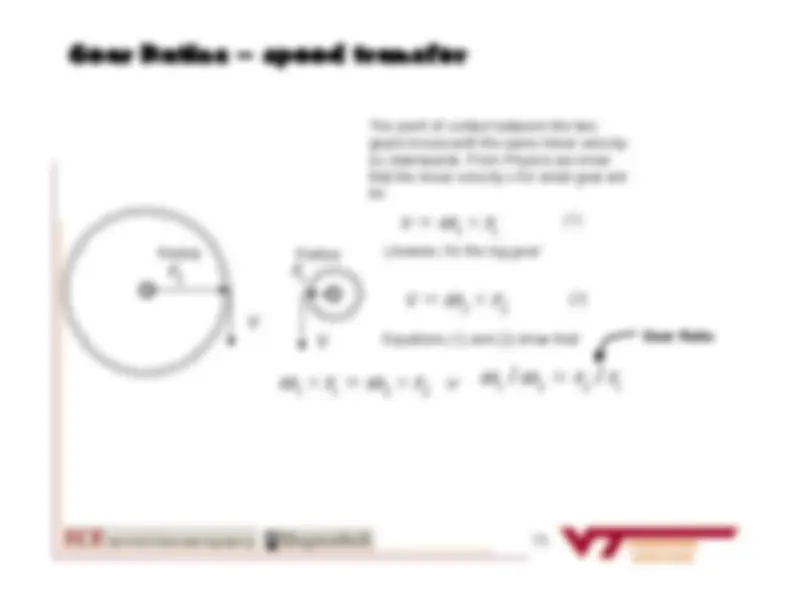
Gear Ratios – speed transfer
The point of contact between the twogears moves with the same linear velocity(v) downwards. From Physics we knowthat the linear velocity v for small gear willbe:
r^11 v^
× =^ ω v v
Likewise, for the big gear: Radius r^1
r^22 v^
×
Radius r^2
=^ ω
(1)
/ /^
(2) rr
Equations (1) and (2) show that:
or^
= ω ω
r r^
× =×^ ω ω
Gear Ratio
14
Gear Ratios – torque transfer
Motor applies torque to the small gear.The small gear pushes on the big gear with a force
F.^ Therefore, torque applied will be:
rF × = τ F F
The force
F^ produces a torque on the big gear. Radius r^1
rF ×
Radius r^2
= τ
(1)^ (2)
Equations (1) and (2) show that:^ τ τ 21 =^^ rr^21
/ /^
rr
or^
= τ τ
16
HW#7– Question 2: Torque and Speed Take the spur-gear example as shown in previous slides. The radius ofsmall gear (i.e., input gear) is 0.50cm, and the radius of the big gear (i.e., outputgear) is 50. cm. 2A : What is the gear ratio? 2B : If the input torque is 0.25 N•m, how much is the torqueproduced at the output? 2C : If the input gear rotates at 50 revolutions/ s, how fastdoes the output gear rotate? Give the answer in radians/s. 2D : Create free hand sketches of both gears. Don’t worry aboutthe scale.
17
Robot Movements
19
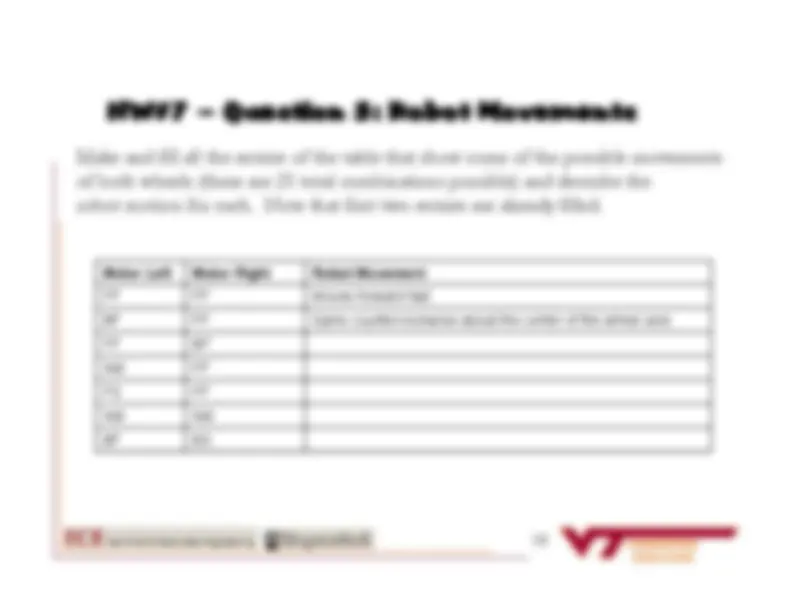
HW#7 – Question 3: Robot Movements Make and fill all the entries of the table that show some of the possible movementsof both wheels (there are 25 total combinations possible) and describe therobot motion for each. Note that first two entries are already filled. Motor Left
Motor Right
Robot Movement
FF^
FF^
Moves forward fast
BF^
FF^
Spins counterclockwise about the center of the wheel axle
FF^
BF NM^
FF FS^
FF NM^
NM BF^
BS
20
Sensors:
Front Switch sensors Rear Switch sensors