



Lecture 14:
Scene Graph
Docsity.com
















Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
In Introduction to Computer Graphics course we study the basic concept of the principle of computer architecture. In these lecture slides the key points are:Scan Conversion, Open Gl Pipeline, Rasterization, Individual Pixel Values, Scan Converting Lines, Line Drawing, Raster Screen, Vertical Distance, Incremental Algorithm, Brsenham’s Algorithm, Intersection Point
Typology: Slides
1 / 35

This page cannot be seen from the preview
Don't miss anything!
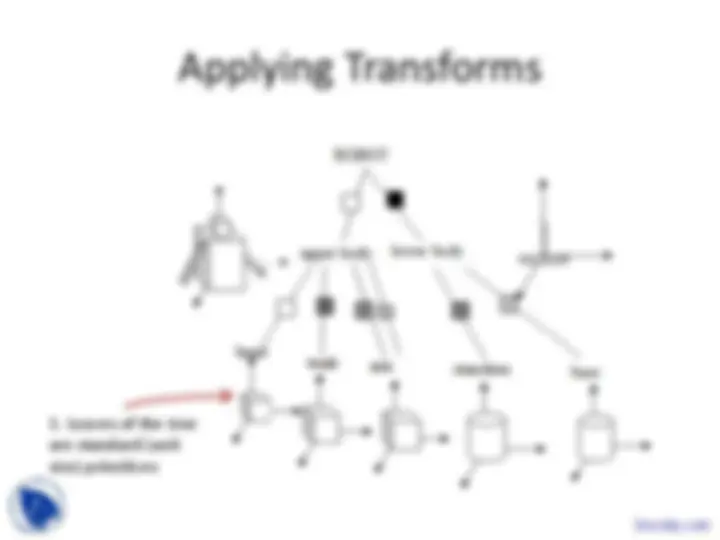
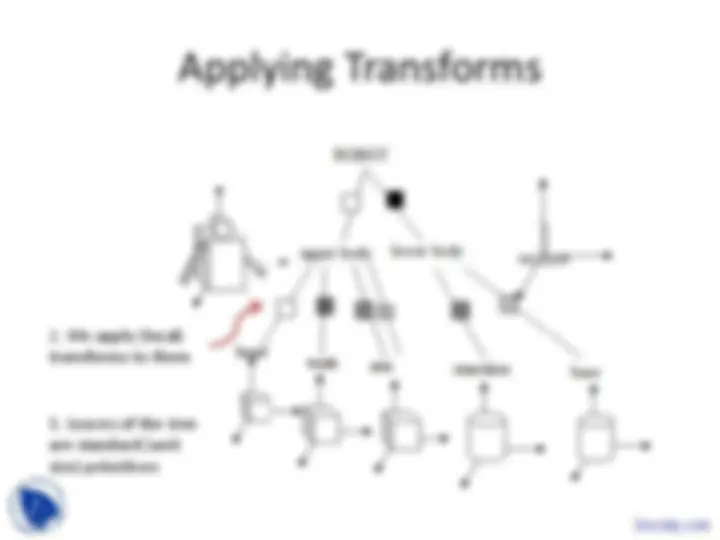
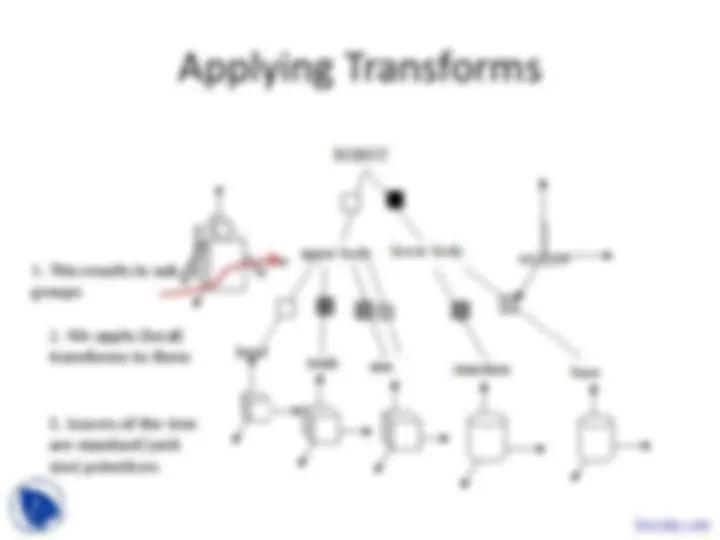
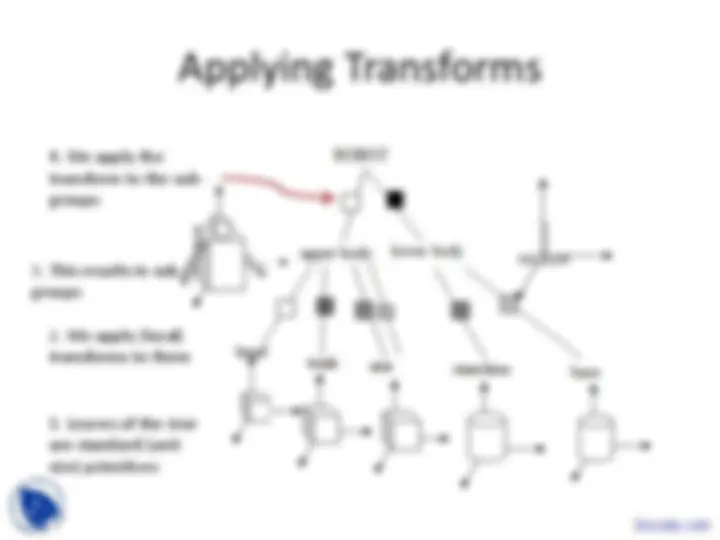
Scene Graph
Refresher: OpenGL Matrix
Transformation Pipeline
1
tan 𝜃𝑤 2 𝑓𝑎𝑟
0 0 0
0
1
tan 𝜃 2 ℎ 𝑓𝑎𝑟
0 0
0 0
1 𝑓𝑎𝑟
0 0 0 0 1
Matrix M = T * (R * S);
for (i=0; i<numTriangles; i++) {
Triangle t = MyObject->triangles[i]; glBegin(GL_TRIANGLES); for (j=0; j<3; j++) { Position p = t->vertex[j]->GetPosition(); Position newP = M * p; glVertex3d (newP.x, newP.y, newP.z); } glEnd();
}
Applying Composite Matrices with
OpenGL
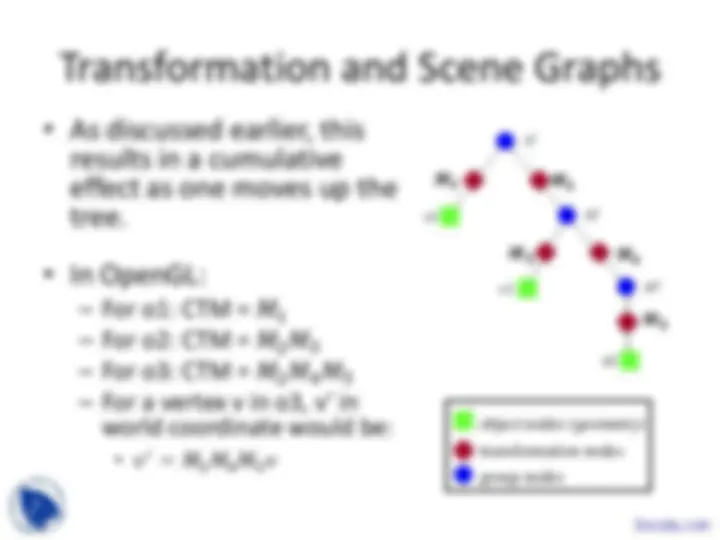
computation for us.