



Chapter 4 - Fundamentals of spatial processes
Lecture notes, part 2, Theory
Odd Kolbjørnsen and Geir Storvik
February 6, 2017
STK4150 - Intro 1












Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
spatial computing spatial computing is a good computing
Typology: Exercises
1 / 27

This page cannot be seen from the preview
Don't miss anything!
Lecture notes, part 2, Theory
Odd Kolbjørnsen and Geir Storvik February 6, 2017 STK4150 - Intro 1
Spatial correlation Stationary Isotropic/Anisotropic Permutation test for independence Variogram Link to covariance Nugget effect Sill Spatial prediction Interpolation Minimum Mean Squared Prediction Error (Kriging) Prediction in a Gaussian model Kriging Simple Kriging (known mean) Bayesian Kriging (prior on mean) Universal Kriging (unknown mean) Ordenary Kriging (Special case of UK) STK4150 - Intro 2
What is the process vs data relation? Set up the prior for the process model. Do the relevant computations to derive joint distribution/second order moments Recall: ( X 1 X 2
∼MVN ((
μ 1 μ 2
E (X 1 |X 2 ) =μ 1 + Σ 12 Σ− 221 (X 2 − μ 2 ) var(X 1 |X 2 ) =Σ 11 − Σ 12 Σ− 221 Σ 21 STK4150 - Intro 4
Z =aY + ε, ε ∼ N(0, σ^2 ) Y ∼N(μ, τ 2 ) ( Y Z
∼MVN ((
μ aμ
τ 2 aτ 2 aτ 2 a^2 τ 2 + σ^2
E (Y |Z ) =μ + aτ 2 a^2 τ 2 + σ^2 (Z − aμ) = μ
σ^2 a^2 τ 2 + σ^2
Z
a
a^2 τ 2 a^2 τ 2 + σ^2
var(Y |Z ) =τ 2 − τ 2
a^2 τ 2 a^2 τ 2 + σ^2
STK4150 - Intro 5
STK4150 - Intro 7
STK4150 - Intro 8
Zi =
Ai Y (s)ds + εi , εi ∼ N(0, σ^2 ), iid G T^ =[g 1 T , ..., g (^) nT ], with gi = I (s ∈ Ai ) E(Zi ) =
Ai μY (s) ds Cov(Y (s 0 ), Zi ) =
Ai CY (s 0 , s) ds Cov(Zi , Zj ) =
Ai
Aj CY (s 1 , s 2 ) ds 1 ds 2 + σ^2 I (i = j) STK4150 - Intro 10
∫
A Y (s)ds
∫
A E (Y (s)|Z )ds Var (V |Z ) =
A
A Cov(Y (s 1 ), Y (s 2 )|Z ) ds 1 ds 2 STK4150 - Intro 11
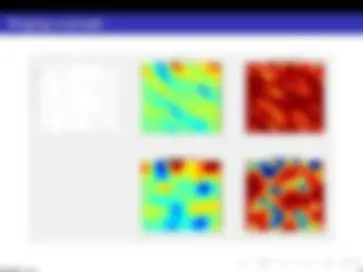
Eigen-representation of moving average kernel:
k(s, u) =
i=
λi φi (s)φi (u)
⇒ Spectral representation random field:
Y (s) =
i=
yi φi (s), with yi ∼ N(0, λ^2 i ), independent
Spectral representation korrelation function (Karhunen-Lo´eve expansion):
CY (s, u) =
i=
λ^2 i φi (s)φi (u) (Σ = V Λ^2 V T^ )
Common to use Fourier transform, Fast Fourier Transform (FFT)
Likelihood: L(θ) = p(Z ; θ) =
p(Z |Y θ) dY
Gaussian process: can be derived analytically Optimization can still be problematic Many routines in R available
STK4150 - Intro 16
Hierarchical model Variable Densities Notation in book Data model: Z p(Z|Y, θ) [Z|Y, θ] Process model: Y p(Y|θ) [Y|θ] (Gaussian in 4.1) Parameter: θ
Hierarchical model Variable Densities Notation in book Data model: Z p(Z|Y, θ) [Z|Y, θ] Process model: Y p(Y|θ) [Y|θ] (Gaussian in 4.1) Parameter: θ Simultaneous model: p(y, z|θ) = p(z|y, θ)p(y|θ) Marginal model: L(θ) = p(z|θ) =
y p(z,^ y|θ)dy Inference: ̂θ = argmaxθL(θ) Bayesian approach: Include model on θ Variable Densities Notation in book Data model: Z p(Z|Y, θ) [Z|Y, θ] Process model: Y p(Y|θ) [Y|θ] (Gaussian in 4.1) Parameter model: θ p(θ) [θ] Simultaneous model: p(y, z, θ) Marginal model: p(z) =
θ
y p(z,^ y|θ)dydθ Inference: ̂θ =
θ θp(θ|z)dθ
Counts, binary data: Gaussian assumption inappropriate Can still have Gaussian assumption on latent process, but non-Gaussian data-distribution Y (s) =x(s)T^ β + ε(s), {ε(s)} Gaussian process Z (si )|Y (si ), θ 1 ∼ind.f(Y (si ), θ 1 ) Best linear predictor still possible, but is it reasonable? Conditional expectation E [Y (s 0 )|Z] still optimal under square loss Not easy to compute anymore Exponential-family model (EFM) f (z) = exp{(zη − b(η))/a(θ 1 ) + c(z, θ 1 )} η =xT^ β Include Binomial, Poisson, Gaussian, Gamma STK4150 - Intro 20