


Metal Forming & Plasticity Lab.
Chapter 2
FORCE
SYSTEMS





























Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
A comprehensive guide to understanding force, moment, and couple in mechanics. It covers key concepts such as external and internal forces, contact and body forces, moment calculation, and couple definition. Numerous examples and sample problems to illustrate the application of these concepts in real-world scenarios. It is a valuable resource for students studying mechanics and related fields.
Typology: Summaries
1 / 45

This page cannot be seen from the preview
Don't miss anything!
Metal Forming & Plasticity Lab.
is defined as the action of one body on another. (definition) is a vector quantity, since its effect depends on the direction as well as on the magnitude. The action of the cable tension P must be treated as a fixed vector because its effect on the bracket depends on the magnitude P , the angle
magnitude 크기 / angle 각 / point of application 작용점 / tension 장력
may be treated as a sliding vector in dealing with the mechanics of rigid bodies. (Why?)
A force may be applied at any point on its given line of action without altering the resultant effects of the force external to the rigid body on which it acts.
rigid body 강체 / principle 원리 / transmissibility 전달성 / resultant 결과로서 생기는, 합성된
External force (외력): applied force (action) / reactive force (reaction) . Internal force (내력): results in internal stress and strain
Contact force (접촉력): generated through direct physical contact, applied over an area (= surface force) Body force (물체력): applied by remote action (= non-contact force), applied over a volume, such as gravitational, electric and magnetic force
Distributed force (분포력): applied over a finite area or volume . Concentrated force (집중력): applied over a very small area or volume
stress 응력 / strain / surface force 표면력 / electric force 전기력 / magnetic force 자기력
Parallelogram law ^ Triangle law
parallelogram 평행사변형 / concurrent force 한 점에 동시에 작용하는 힘
1 2 a b
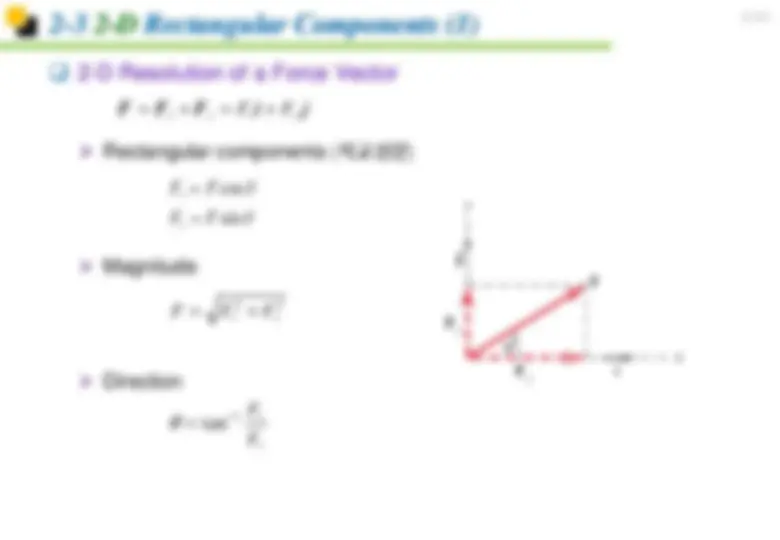
Components : Projections :
resolution 분해 / component 성분 / projection 정사영 / parallel 평행한
The assignment of reference axes is a matter of arbitrary convenience.
reference axes 기준(좌표)축
1 2 1 2
x x x y y y
x y
i j
i j
i j i j
x y
x x y y
x y x y
1 2 1 2
1 1 2 2
1 2
coplanar forces 동일 평면 상의 힘들
Algebraic Solution
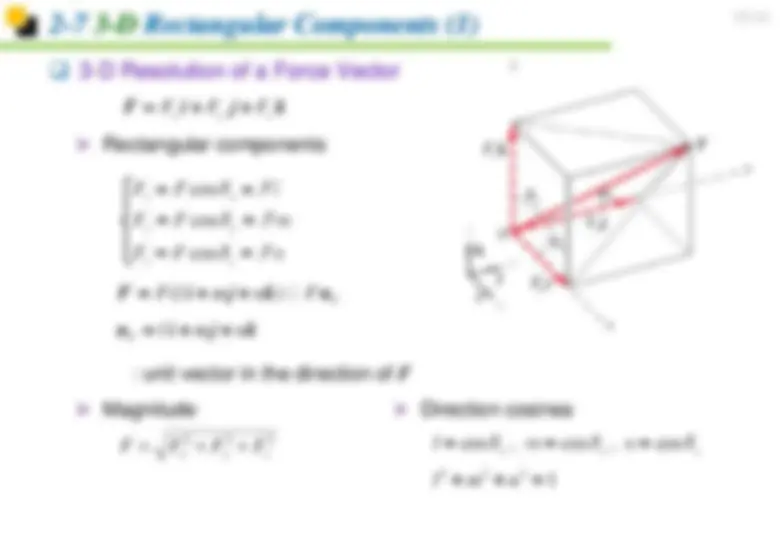
In vector notation,
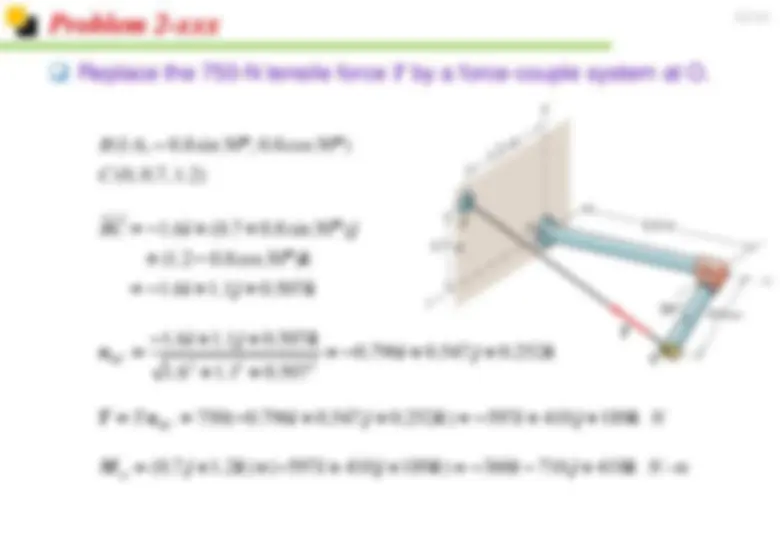
tan 6sin 60 0. 3 6 cos 60
α BD AD α
° ° °
R = P + T = 800 i + −( 600cos α i − 600sin α j ) = 346 i − 393 j
800 600 cos 346 N 0 600sin 393 N
x x x y y y
R = P +T α R = P +T α
(^2 2 2 )
1 1
tan tan 393 48. 346
x y y x
θ = R
− − °
equivalent 등가의 / algebraic solution 대수적 해
is the tendency of a force to rotate a body about an axis which neither intersects nor is parallel to the line of action of the force. may be considered as a sliding vector with a line of action coinciding with the moment axis. is also referred to as torque (= moment of force). moment of inertia moment of area moment of momentum
The moments of a force about any point is equal to the sum of the moments of the components of the force about the same point.
R = P +Q M (^) O = r × R = r × ( P + Q ) = ( r × P ) + ( r ×Q)
(1) Moment arm
(2) Varignon’s theorem
(1) (2)
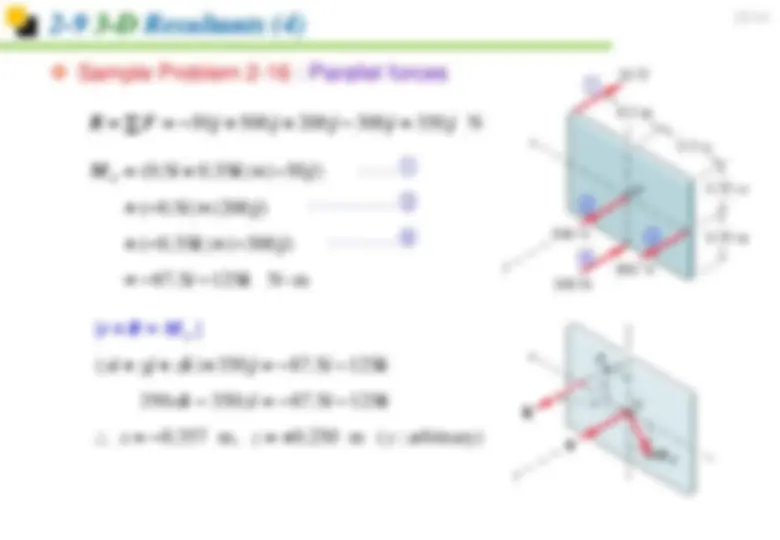
600 cos 40 460 600sin 40 386 460(4) 386(2) 2, 610
x y O
M N m
4 cos 40 2sin 40 4. O 600(4.35)^ 2, 610^ (CW)
d m M N m
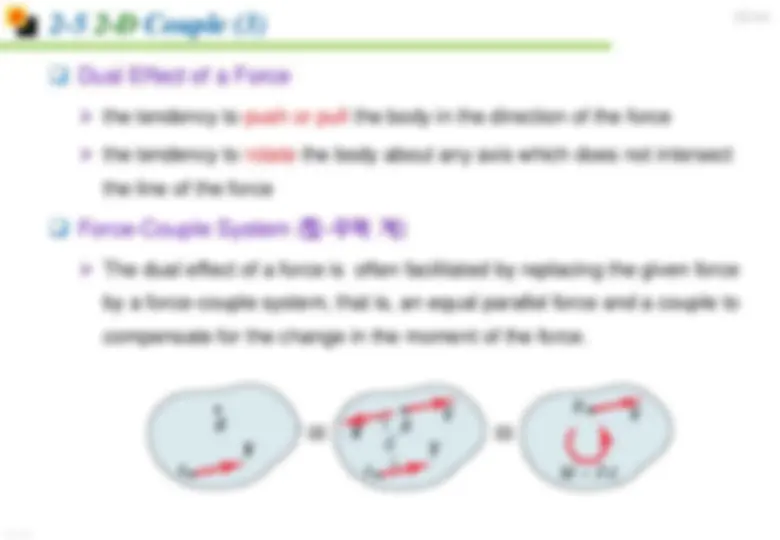
The moment produced by two equal and opposite and non-collinear forces is called a couple.
The moment expression contains no reference to O ( a, r A , r B ). The moment of a couple has the same value for all moment centers. Thus, we may represent M by a free vector.
M (^) O = F a + d ( ) - F a = F d M (^) O = r A (^) × F + r B (^) × − ( F ) = ( r A (^) − r B )× F = r ×F
Four different configurations of the same couple M :
Counter-clockwise (CCW) Clockwise (CW)
sense 부호 / equivalent 등가의