®
L297
STEPPER MOTOR CONTROLLERS
NORMAL/WAVE DRIVE
HALF/FULL STEP MODES
CLOCKWISE/ANTICLOCKWISE DIRECTION
SWITCHMODE LOAD CURRENT REGULA-
TION
PROGRAMMABLE LOAD CURRENT
FEW EXTERNAL COMPONENTS
RESET INPUT & HOME OUTPUT
ENABLE INPUT
DESCRIPTION
The L297 Stepper Motor Controller IC generates
four phase drive signals for two phase bipolar and
four phase unipolar step motors in microcomputer-
controlled applications. The motor can be driven in
half step, normal and wawe drive modes and on-
chip PWM chopper circuits permit switch-mode
control of the current in the windings. A feature of
December 2001
Symbol Parameter Value Unit
VsSupply voltage 10 V
ViInput signals 7V
P
tot Total power dissipation (Tamb = 70°C) 1W
T
stg, TjStorage and junction temperature -40 to + 150 °C
ABSOLUTE MAXIMUM RATINGS
this device is that it requires only clock, direction
and mode input signals. Since the phase are gen-
erated internally the burden on the microprocessor,
and the programmer, is greatly reduced. Mounted
in DIP20 and SO20 packages, the L297 can be
used with monolithic bridge drives such as the
L298N or L293E, or with discrete transistors and
darlingtons.
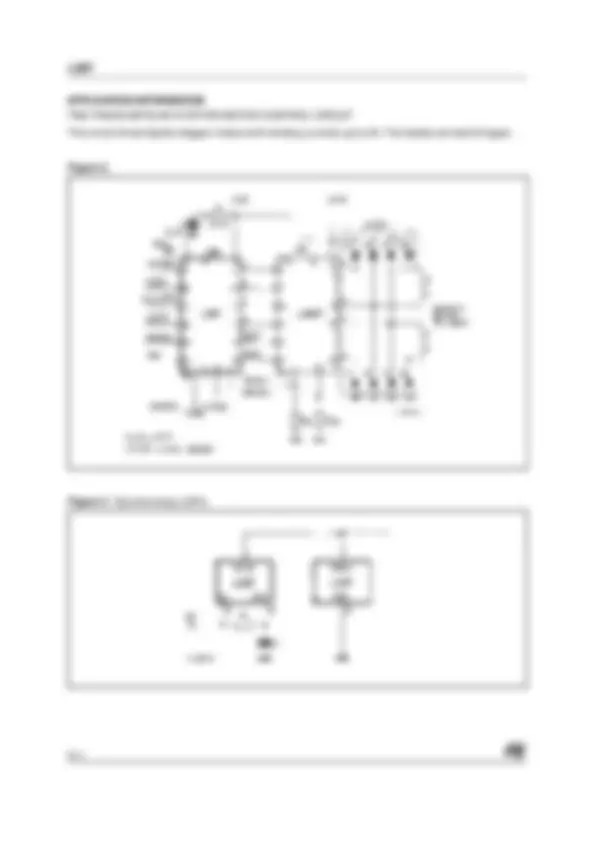
TWO PHASE BIPOLAR STEPPER MOTOR CONTROL CIRCUIT
DIP20 SO20
ORDERING NUMBERS : L297/1 (DIP20)
L297D (SO20)
1/11