Download Stochastic Subgradient Method: Convergence and Applications and more Slides Convex Optimization in PDF only on Docsity!
Stochastic Subgradient Method
noisy unbiased subgradient
stochastic subgradient method
convergence proof
stochastic programming
expected value of convex function
on-line learning and adaptive signal processing
Prof. S. Boyd, EE364b, Stanford University
docsity.com
Noisy unbiased subgradient
random vector
g
R
n
is a
noisy unbiased subgradient
for
f
R
n
R
at
x
if for all
z
f
z
f
x
E
˜g
T
z
x
i.e.
g
E
g
∂f
x
same as
g
g
v
, where
g
∂f
x
E
v
v
can represent error in computing
g
, measurement noise, Monte Carlo
sampling error, etc.
Prof. S. Boyd, EE364b, Stanford University
1
docsity.com
Stochastic subgradient method
stochastic subgradient method
is the subgradient method, using noisy
unbiased subgradients
x
(
k
+1)
x
(
k
)
α
k
g
(
k
)
x
(
k
)
is
k
th iterate
g
(
k
)
is any noisy unbiased subgradient of (convex)
f
at
x
(
k
)
i.e.
E
g
(
k
)
x
(
k
)
g
(
k
)
∂f
x
(
k
)
α
k
is the
k
th step size
define
f
(
k
)
best
= min
f
x
(1)
,... , f
x
(
k
)
Prof. S. Boyd, EE364b, Stanford University
3
docsity.com
Assumptions
f
⋆
= inf
x
f
x
, with
f
x
⋆
f
⋆
E
g
(
k
)
22
G
2
for all
k
E
x
(1)
x
⋆
22
R
2
(can take
here)
step sizes are square-summable but not summable
α
k
∞
∑ k
=
α
2 k
α
2 2
∞
k
=
α
k
these assumptions are stronger than needed, just to simplify proofs Prof. S. Boyd, EE364b, Stanford University
4
docsity.com
Convergence proof
key quantity:
expected Euclidean distance squared to the optimal set
E
x
(
k
+1)
x
⋆
22
x
(
k
)
E
x
(
k
)
α
k
g
(
k
)
x
⋆
22
x
(
k
)
x
(
k
)
x
⋆
2 2
α
k
E
˜g
(
k
)
T
x
(
k
)
x
⋆
x
(
k
)
α
2 k
E
˜g
(
k
)
2 2
x
(
k
)
x
(
k
)
x
⋆
2 2
α
k
E
g
(
k
)
x
(
k
)
T
x
(
k
)
x
⋆
α
2 k
E
g
(
k
)
2 2
x
(
k
)
x
(
k
)
x
⋆
2 2
α
k
f
x
(
k
)
f
⋆
α
2 k
E
˜g
(
k
)
2 2
x
(
k
)
using
E
g
(
k
)
x
(
k
)
∂f
x
(
k
)
Prof. S. Boyd, EE364b, Stanford University
6
docsity.com
now take expectation:
E
x
(
k
+1)
x
⋆
2 2
E
x
(
k
)
x
⋆
2 2
α
k
E
f
x
(
k
)
f
⋆
α
2 k
E
g
(
k
)
2 2
apply recursively, and use
E
g
(
k
)
22
G
2
to get
E
x
(
k
+1)
x
⋆
2 2
E
x
(1)
x
⋆
2 2
k
i
=
α
i
E
f
x
(
i
)
f
⋆
G
2
k
i
=
α
2 i
and so
min
i
=
,...,k
E
f
x
(
i
)
f
⋆
R
2
G
2
α
22
k i
=
α
i
Prof. S. Boyd, EE364b, Stanford University
7
docsity.com
Example
piecewise linear minimization
minimize
f
x
) = max
i
=
,...,m
a
Ti
x
b
i
we use stochastic subgradient algorithm with noisy subgradient
g
(
k
)
g
(
k
)
v
(
k
)
g
(
k
)
∂f
x
(
k
)
v
(
k
)
independent zero mean random variables
Prof. S. Boyd, EE364b, Stanford University
9
docsity.com
problem instance:
n
variables,
m
terms,
f
⋆
α
k
/k
v
(
k
)
are IID
N
I
noise since
g
1000
2000
3000
4000
5000
10
−
10
−
10
−
10
0
k
f
)k(
best
f −
⋆
noise-free caserealization 1realization 2
Prof. S. Boyd, EE364b, Stanford University
10 docsity.com
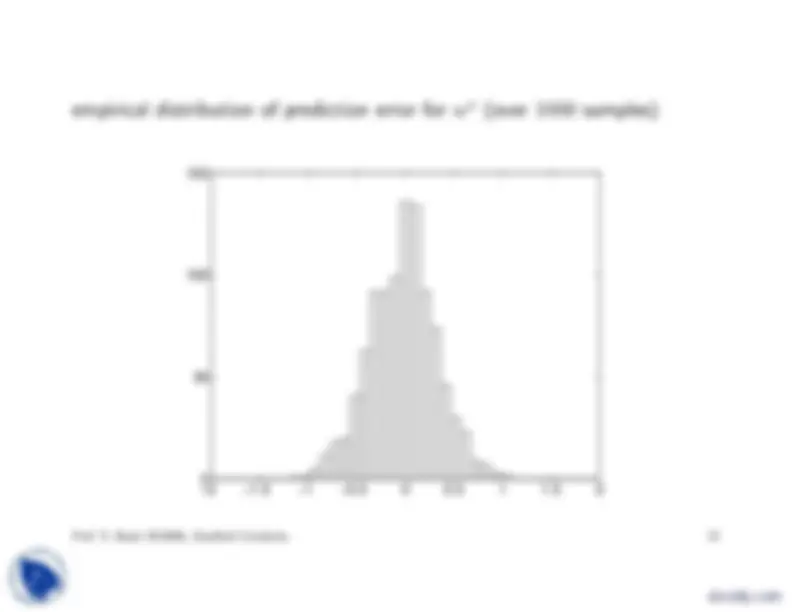
empirical distributions of
f
(
k
)
best
f
⋆
at
k
k
, and
k
10
−
10
−
10
−
10
0
0
30 20 10
10
−
10
−
10
−
10
0
0
30 20 10
10
−
10
−
10
−
10
0
0
30 20 10
k
k
k
Prof. S. Boyd, EE364b, Stanford University
12 docsity.com
Stochastic programming
minimize
E
f
0
x, ω
subject to
E
f
i
x, ω
i
,... , m
if
f
i
x, ω
is convex in
x
for each
ω
, problem is convex
‘certainty-equivalent’ problem
minimize
f
0
x,
E
ω
subject to
f
i
x,
E
ω
i
,... , m
(if
f
i
x, ω
is convex in
ω
, gives a lower bound on optimal value of
stochastic problem) Prof. S. Boyd, EE364b, Stanford University
13 docsity.com
Expected value of convex function
suppose
F
x, w
is convex in
x
for each
w
and
G
x, w
x
F
x, w
f
x
E
F
x, w
F
x, w
p
w
dw
is convex
a subgradient of
f
at
x
is
g
E
G
x, w
G
x, w
p
w
dw
∂f
x
a noisy unbiased subgradient of
f
at
x
is
g
M
M
i
=
G
x, w
i
where
w
1
,... , w
M
are
M
independent samples (Monte Carlo)
Prof. S. Boyd, EE364b, Stanford University
15 docsity.com
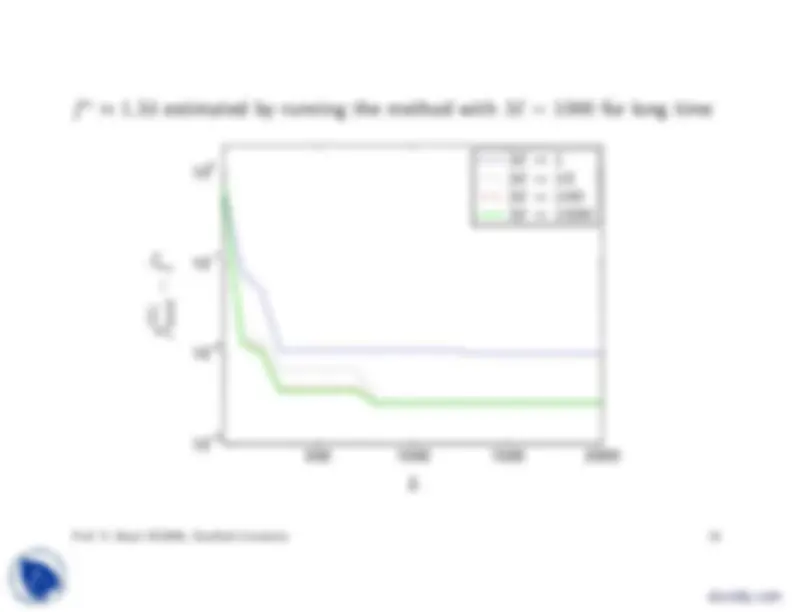
Example: Expected value of piecewise linear function
minimize
f
x
E
max
i
=
,...,m
a
Ti
x
b
i
where
a
i
and
b
i
are random
evaluate noisy subgradient using Monte Carlo method with
M
samples,
and run stochastic subgradient methodcompare to:
certainty equivalent: minimize
f
ce
x
) = max
i
=
,...,m
E
a
Ti
x
E
b
i
heuristic: minimize
f
heur
x
) = max
i
=
,...,m
E
a
Ti
x
E
b
i
λ
x
2
Prof. S. Boyd, EE364b, Stanford University
16 docsity.com
f
⋆
estimated by running the method with
M
for long time
500
1000
1500
2000
10
−
10
−
10
−
10
0
k
f
)k(
best
f
⋆
M
= 1
M
= 10
M
= 100
M
= 1000
Prof. S. Boyd, EE364b, Stanford University
18 docsity.com
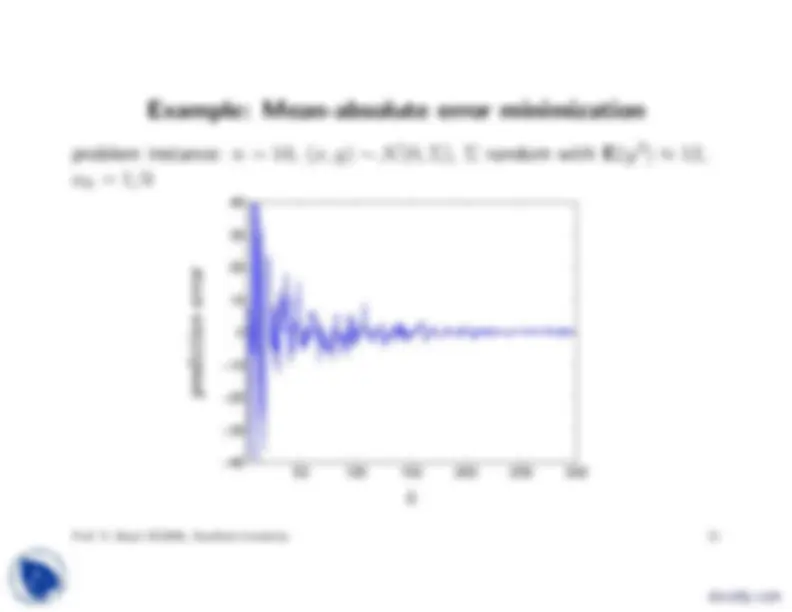
On-line learning and adaptive signal processing
x, y
R
n
×
R
have some joint distribution
find weight vector
w
R
n
for which
w
T
x
is a good estimator of
y
choose
w
to minimize expected value of a convex
loss function
l
J
w
E
l
w
T
x
y
l
u
u
2
: mean-square error
l
u
u
: mean-absolute error
at each step (
e.g.
, time sample), we are given a sample
x
(
k
)
, y
(
k
)
from
the distribution
Prof. S. Boyd, EE364b, Stanford University
19 docsity.com