



Random vibration of MDOF systems -2
Docsity.com




































Study with the several resources on Docsity

Earn points by helping other students or get them with a premium plan

Prepare for your exams
Study with the several resources on Docsity
Earn points to download
Earn points by helping other students or get them with a premium plan
Some basics concept of Stochastic Structural Dynamics are Moment of Input, Monte Carlo Simulation Approach, Multi-Dimensional Random Variables, Probabilistic Model.Main pouints of this lecture are: Structural Matrices, Random Vibration, Unit Harmonic Force, Impulse Response Functions, Arbitrary Load, Frequency Domain, Stationary Vector Random Excitation, Building Frame, Modal Participation Factor, Modal Interactions
Typology: Slides
1 / 46

This page cannot be seen from the preview
Don't miss anything!
Docsity.com
2
Docsity.com
4
^ ^
^
^ ^
^ ^
^
^ ^
^ ^
^
^ ^
^
(^002020)
0
0
2
0 2
exp^0 0 0
lim^
exp exp exp exp
exp^
exp^
exp
exp^
exp
MX^ CX^ t t
i^ t F X^ t^
X^ i^
t X^ t^ X i
i^
t X^ t^
i^ t MX^
i^ t^ CX i
i^
t^ KX^
i^ t^ F^
i^ t
M^ i^ C
i^ t^ F^
i^ t
M^ i^ C
Docsity.com
5
^
^ ^
^
2
0 0
0 2
0 2
0 2
0
2 exp^ exp &^0 is classical
(Diagonal) with
t^
t t
nn^ n^
n
t^
t t^
t^ t
t t M^ i^ C
X^ t^ X
i^
t^ Z^
i^ t
M^ I^
M^ i^ C
M^ i^ C
M^ i^
I^ i^
Diagonal
Docsity.com
7
^
^
^
^ ^
^
^
^ ^
^ ^ ^
^ ^ ^ ^
^
(^2 212 )
1 2
(^2 )
N
rn^ sn rs n^
n^
n^ n N
rn^ sn rs n
n^
n^ n rs^
sr rs^
sr rs
N
rn^ sn n^ n^
n^ n
^ ^
^
^ ^
^
^
^ ^
8
^ ^ ^
^
1 2 2
2 1
N
rn^ sn n^ n^
n^ n
^
^ ^
^ ^
Docsity.com
10
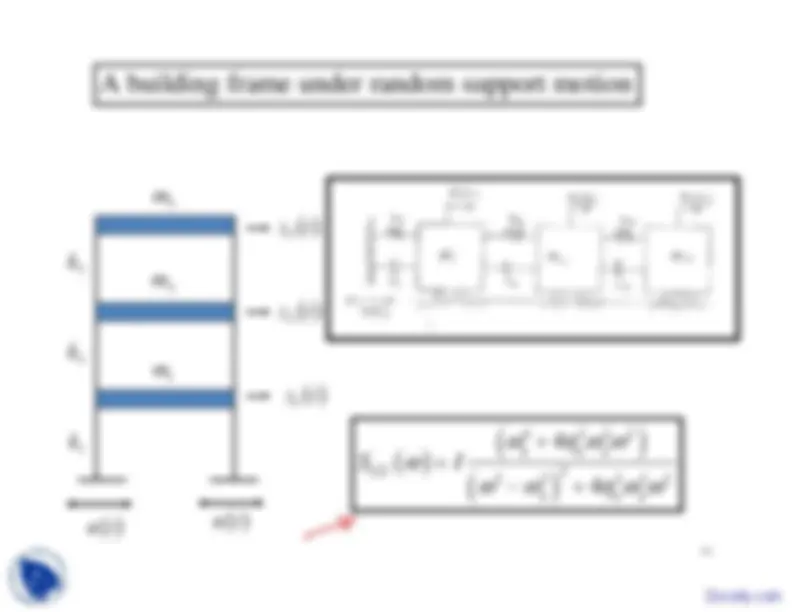
(^6 2) 4.5 10 Nm^ for all columns=0.03 for all modes EI ^
Example
Docsity.com
11
1 1 1 1
2 1 2 2 2 2 2 1 3
2 3 3 3 3 3
2 1
1 (^62)
2 3
3
6 2
6 6 (^ )^06 (^ )^
(^ )^
0 (^ )^
0 5000 0
0
2 1 0
0 4000
0
4 10 1
2 1
0
0 0
3000
0 1 1
8 10 5000
4 10
0
4 10
8 10 400 m x^ k x^
k^ x^ x m x^ k^ x
x^ k^
x^ x m x^ k^ x
x
x^
x x^
x x^
x
^ ^ ^ ^ ^ ^
^ ^ ^
^
^ ^
^
^ ^ ^
^
^
^
^
^ ^
^
^ ^
^
^
^
^
^ ^
^
^
^
^
^
^ ^
^
^
^ ^
^
^
2
6 6
6 2
6
4
7 2
9 0
4 10
0
0
4 10
4 10 3000
4933.^
5.867^10
1.066^10
0
14.86, 38.78, 56.
rad/s 0.0058^ 0.
0.0100^ 0.
0.^ 0.^
^ 0.
^
^
^
^
^ ^
^ ^
^
^
^
^
^
^
Docsity.com
13
0 10
20 30
40 50
60 70
80
-5 10 -6 10 -7 10 -8 10
frequency rad/s abs(H11)^0
20
30 40
50 60
70 80
(^0) -1 -2 -3 -
frequency rad/s angle(H11)
Docsity.com
14
0 10
20 30
40 50
60 70
80
-5 10 -10 10
frequency rad/s abs(H13)^0
20
30 40
50 60
70 80
(^0) -5 -
frequency rad/s angle(H13)
Docsity.com
16
^ ^ ^
^ ^
0 0;^
0 0 0 0
1
0 0
MX^ CX t
KX^
F^ t X^
X F
^
^
^
th entry s^ response of the
-th coordinate due to unit impulse driving at
-th coordinate. X^ t^ rs
r s
Docsity.com
17
^ ^
^
^
^
^
^
^
0 0
is classical
(Diagonal) with
t t^
t t
nn^ n^
n
t^
t^
t^
t t MX^ CX
F^ t F X^ t^
Z t M I^ K C^
M^ Z t^
C^ Z t^
K^ Z t^
F^ t
M^ Z t^
C^ Z t^
K^ Z t^
F^ t
Docsity.com
19
^
^
^ ^
^
1
1 exp^
sin
Remarks
Matrix of impulse response functions Not all modes need to be included in the summationIf an arbitrary load
N r^ rs^
rn^ sn^
n^ n^
dn
n^
dn rs^ sr
rs t s X^ t^ h
t^
t^ t
h^ t^ h
t h t h^ t h t h t
f
^
^ ^
^ ^ ^
^ ^
^ ^ ^ ^ ^
^
^ ^
^ ^
^ ^
^ ^
^
(^010)
is applied at the
-th dof (instead of
unit impulse excitation)
1 exp^
sin
t rs rs^
s t^
N s rn^ sn^
n^ n^
dn
n^
dn
s
X^ t^
h^ t^
f^ d f^
t^
t^ d
^
^ ^
^
^
^ ^
^
^
^
^
Docsity.com
20
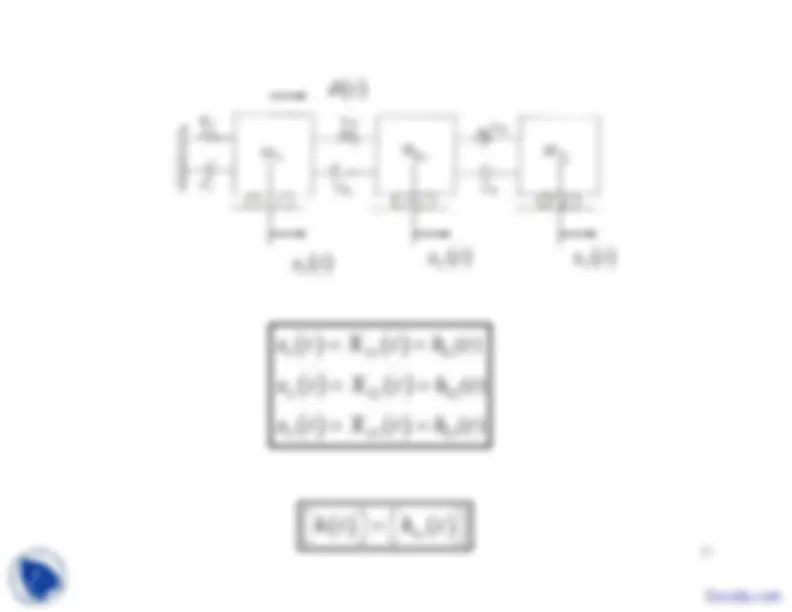
t 1 11
11 2 12
12 3 13
( ) ( ) ( ) 13 x^ t^ X^
t^ h^ t x^ t^ X t^ h^
t x^ t^ X^ ^ ^ t^ h^ t ^ h t^ h^ t ^ rs ^ ^
^ ^
Docsity.com